Dispositivo de posicionamiento angular con tres puntos muertos.
Dispositivo de posicionamiento angular que consta de:
•
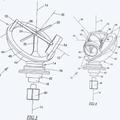
una primera biela (11) en unión pivotante con un chasis del dispositivo (10, 30, 40, 50, 60) de posicionamiento angular según un primer eje (X1),
• un dispositivo de accionamiento adecuado para arrastrar la primera biela (11) en rotación según el primer eje (X1),
• una segunda biela (12) en unión pivotante con la primera biela (11) según un segundo eje (X2),
• una tercera biela (13) en unión pivotante con el chasis según un tercer eje (X3),
• una cuarta biela (14) en unión pivotante con el chasis según un cuarto eje (X4) y en unión pivotante con la segunda biela (12) según un quinto eje (X5),
• una quinta biela (15) en unión pivotante con la tercera biela (13) según un sexto eje (X6), y en unión pivotante con la segunda o la cuarta biela (12, 14) según un séptimo eje (X7, X8),
siendo paralelos los unos a los otros el primer, segundo, tercero, cuarto, quinto, sexto y séptimo ejes (X1-X8), configurándose el dispositivo (10, 30, 40, 50 60) de posicionamiento angular de manera que la tercera biela (13) pueda adoptar tres posiciones (θ1, θ2, θ3) angulares distintas para cada una de las cuales dos de las bielas en unión pivotante entre sí generan un punto muerto en el dispositivo de posicionamiento angular.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13180337.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: BAUDASSE,YANNICK, VEZAIN,STEPHANE, GUIONIE,SÉBASTIEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H21/40 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 21/00 Transmisiones que no implican esencialmente nada más que varillas o palancas con o sin deslizadoras (F16H 23/00 tiene prioridad). › para convertir un movimiento rotativo en movimiento oscilante y viceversa.
- G02B7/00 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › Monturas, medios de regulación o uniones estancas a la luz para elementos ópticos.
- G02B7/182 G02B […] › G02B 7/00 Monturas, medios de regulación o uniones estancas a la luz para elementos ópticos. › para espejos (dispositivos o sistemas ópticos que utilizan elementos ópticos móviles o deformables para gobernar la intensidad, el color, la fase, la polarización o la dirección de la luz G02B 26/00).
PDF original: ES-2540982_T3.pdf
Fragmento de la descripción:
Dispositivo de posicionamiento angular con tres puntos muertos
La invención se sitúa en el campo de la transmisión de movimientos mecánicos. Esta se refiere a un dispositivo mecánico de posicionamiento angular y se aplica, concretamente, a los instrumentos ópticos que requieren posicionar un elemento, tal como un espejo, según tres posiciones predefinidas.
Existen numerosos dispositivos mecánicos para realizar un posicionamiento angular. Por ejemplo, un sencillo motor paso a paso puede permitir un posicionamiento angular según uno de sus pasos. Sin embargo, los dispositivos convencionales pueden resultar no adaptados para ciertas aplicaciones. Tal es el caso, por ejemplo, cuando se requieren precisiones angulares de aproximadamente la centésima parte de grado. Además, se encuentran dificultades adicionales cuando se desea obtener una buena estabilidad y una buena fiabilidad de las diferentes posiciones angulares. En otras palabras, es difícil obtener posiciones precisas que puedan mantenerse durante unos períodos de tiempo dados, y que puedan reencontrarse después de haber sido abandonadas. Se encuentran exigencias estrictas en cuanto a precisión, a estabilidad y a fiabilidad concretamente en el campo de la instrumentación óptica. A modo de ejemplo, un instrumento óptico puede requerir un calibrado de uno de sus sensores. Este calibrado puede consistir en orientar un espejo alrededor de un eje según tres posiciones distintas. Una primera posición, llamada posición escenario, corresponde a la posición en la que el espejo refleja una proyección desde una zona que se va a estudiar. Se dice que el espejo apunta hacia la zona que se va a estudiar. Otras dos posiciones, llamadas posiciones de calibrado, corresponden a unas posiciones en las que el espejo refleja la proyección de fuentes de referencia. Estos emisores de referencia son, por ejemplo, unos cuerpos negros o una mira hacia el espacio frió. El calibrado del sensor requiere en este caso un posicionamiento del espejo en la primera posición de calibrado, a continuación en la segunda posición de calibrado y, finalmente, en la posición escenario.
Uno de los elementos que influyen en el comportamiento del dispositivo mecánico de posicionamiento es, por supuesto, el accionador. Como norma general, se trata de un motor eléctrico. Pueden utilizarse diferentes tipos de motores eléctricos. Los motores de bobina móvil, denominados "voice coN", presentan una gran precisión. Sin embargo, requieren un control con ayuda de un servomecanismo de bucle cerrado y el mantenimiento en una posición dada impone una alimentación eléctrica permanente. Los accionadores piezoeléctricos presentan igualmente una gran precisión. Sin embargo, deben controlarse también mediante un servomecanismo de bucle cerrado. Además, presentan un producto esfuerzo - recorrido relativamente escaso. En la práctica, se requiere por lo tanto utilizar accionadores piezoeléctricos de dimensiones importantes. Los motores paso a paso, por su parte, tienen la ventaja de poder controlarse sin bucle cerrado y permiten el mantenimiento de una posición sin necesitar alimentación. En cambio, la precisión angular es, por lo general, insuficiente. Una solución consiste en asociar un reductor mecánico al motor paso a paso. El reductor permite reducir el desplazamiento angular de salida con respecto al desplazamiento angular del motor. De esta manera, para cada paso del motor, el desplazamiento angular de salida representa una fracción de este paso. El reductor puede, por ejemplo, adoptar la forma de un dispositivo de engranajes. Sin embargo, con la finalidad de obtener escasas relaciones de transmisión, por ejemplo de aproximadamente la centésima parte, el dispositivo debe comprender un número importante de ruedas dentadas. Además de los problemas de complejidad y de volumen, un reductor de este tipo introduce un juego y un par resistente. Existen dispositivos de supresión del juego, pero estos introducen un par adicional. Otra solución de reductor se basa en la utilización de un brazo animado en rotación mediante el motor a través de dos bielas. El brazo está en unión pivotante con un chasis. El motor arrastra una primera biela en rotación. La segunda biela se une a la primera biela mediante una primera unión pivotante y al brazo mediante una segunda unión pivotante. Cuando los ejes de estas dos uniones pivotantes se encuentran en un mismo plano con el eje de rotación del motor, las dos bielas definen un punto muerto, es decir una configuración en la que el movimiento del brazo se invierte. Esta inversión se acompaña de una disminución puntual de la relación de transmisión entre el desplazamiento angular del brazo y el del rotor. No obstante, un dispositivo de este tipo solo consta de dos puntos muertos y no se adapta para un posicionamiento angular según tres posiciones distintas.
La patente US 4 246 628 describe un mecanismo de arrastre asimilable a un conjunto de cuatro bielas que permite posicionar una lámpara que puede retraerse en dos posiciones. La patente FR 2 779 790 describe un convertidor de un movimiento circular alrededor de un pivote en movimiento alternativo pendular alrededor de otro pivote de un accionador entre su posición de reposo vertical a su posición de trabajo. La patente WO 92/08913 describe un ensamblaje de bielas. Para un dispositivo que consta de n bielas intermedias, una rotación de la primera biela arrastra 2n'1 rotaciones de la última biela. La patente US 584 519 describe un mecanismo que permite la conversión de un movimiento de rotación de un eje en un movimiento de traslación de dos correderas sobre un mismo eje.
Un objetivo de la invención es, concretamente, proporcionar un reductor mecánico adecuado para proporcionar tres posiciones angulares distintas con una escasa relación de transmisión. Para ello, la invención tiene como objeto un dispositivo de posicionamiento angular que consta de:
una primera biela en unión pivotante con un chasis del dispositivo de posicionamiento angular según un
primer eje,
un dispositivo de accionamiento adecuado para arrastrar la primera biela en rotación según el primer eje,
una segunda biela en unión pivotante con la primera biela según un segundo eje,
una tercera biela en unión pivotante con el chasis según un tercer eje,
una cuarta biela en unión pivotante con el chasis según un cuarto eje y en unión pivotante con la segunda biela según un quinto eje,
una quinta biela en unión pivotante con la tercera biela según un sexto eje, y en unión pivotante con la segunda o la cuarta biela según un séptimo eje,
siendo paralelos los unos a los otros el primer, segundo, tercero, cuarto, quinto, sexto y séptimo ejes, configurándose el dispositivo de posicionamiento angular de manera que la tercera biela pueda adoptar tres posiciones angulares distintas para cada una de las que dos de las bielas en unión pivotante entre sí generen un punto muerto en el dispositivo de posicionamiento angular.
El dispositivo de accionamiento es, por ejemplo, un motor rotativo que comprende un estátor solidario del chasis del dispositivo de posicionamiento, y un rotor solidario de la primera biela.
Al menos una de las posiciones angulares de la tercera biela para la que se genera un punto muerto puede corresponder a una coincidencia del segundo eje con el plano que contiene el primer y el quinto eje.
Según una forma particular de realización, la quinta biela está en unión pivotante con la segunda biela. En esta forma de realización, al menos una de las posiciones angulares de la tercera biela para la que se genera un punto muerto puede corresponder a una coincidencia del quinto eje con el plano que contiene el cuarto y el séptimo eje.
Según otra forma particular de realización, la quinta biela está en unión pivotante con la cuarta biela. En esta forma de realización, al menos una de las posiciones angulares de la tercera biela para la que se genera un punto muerto puede corresponder a una coincidencia del séptimo eje con el plano que contiene el cuarto y el sexto eje.
Según una forma particular de realización, el quinto y el séptimo eje de las uniones pivotantes se superponen.
La invención también tiene como objeto un sistema de calibrado de un instrumento óptico, que comprende un dispositivo de posicionamiento angular tal como se ha descrito anteriormente, siendo adecuado un elemento del instrumento óptimo para fijarse a la tercera biela.
La invención tiene concretamente como ventaja que permite obtener a la vez una escasa relación de transmisión alrededor de las posiciones angulares de interés, y una relación de transmisión más importante fuera, lo que permite aumentar la velocidad de paso entre las... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de posicionamiento angular que consta de:
una primera biela (11) en unión pivotante con un chasis del dispositivo (10, 30, 40, 50, 60) de posicionamiento angular según un primer eje (Xi),
un dispositivo de accionamiento adecuado para arrastrar la primera biela (11) en rotación según el primer eje
(Xi),
una segunda biela (12) en unión pivotante con la primera biela (11) según un segundo eje (X2),
una tercera biela (13) en unión pivotante con el chasis según un tercer eje (X3),
una cuarta biela (14) en unión pivotante con el chasis según un cuarto eje (X4) y en unión pivotante con la segunda biela (12) según un quinto eje (X5),
una quinta biela (15) en unión pivotante con la tercera biela (13) según un sexto eje (Xe), y en unión pivotante con la segunda o la cuarta biela (12, 14) según un séptimo eje (X7, Xs),
siendo paralelos los unos a los otros el primer, segundo, tercero, cuarto, quinto, sexto y séptimo ejes (X1 -Xs), configurándose el dispositivo (10, 30, 40, 50 60) de posicionamiento angular de manera que la tercera biela (13) pueda adoptar tres posiciones (0i, 02, ©3) angulares distintas para cada una de las cuales dos de las bielas en unión pivotante entre sí generan un punto muerto en el dispositivo de posicionamiento angular.
2. Dispositivo según la reivindicación 1, en el que el dispositivo de accionamiento es un motor rotativo que comprende un estátor solidario del chasis del dispositivo de posicionamiento, y un rotor solidario de la primera biela (11).
3. Dispositivo según una de las reivindicaciones 1 y 2, en el que al menos una de las posiciones (02, 63) angulares de la tercera biela (13) corresponde a una coincidencia del segundo eje (X2) con el plano que contiene el primer eje (X1) y el quinto eje (X5).
4. Dispositivo según una de las reivindicaciones anteriores, en el que la quinta biela (15) está en unión pivotante con la segunda biela (12), correspondiendo al menos una de las posiciones angulares de la tercera biela (13) a una coincidencia del quinto eje (X5) con el plano que contiene el cuarto eje (X4) y el séptimo eje (Xs).
5. Dispositivo según una de las reivindicaciones 1 a 4, en el que la quinta biela (15) está en unión pivotante con la cuarta biela (14), correspondiendo al menos una de las posiciones (0i) angulares de la tercera biela (13) a una coincidencia del séptimo eje (X7) con el plano que contiene el cuarto eje (X4) y el sexto eje (Xe).
6. Dispositivo según una de las reivindicaciones anteriores, en el que el quinto eje (X5) y el séptimo eje (X7, Xs) de las uniones (25, 27, 28) pivotantes se superponen.
7. Sistema de calibrado de un instrumento óptico, que comprende un dispositivo (10, 30, 40, 50, 60) de posicionamiento angular según una de las reivindicaciones anteriores, siendo adecuado un elemento del instrumento óptico para ser fijado a la tercera biela (13).
Patentes similares o relacionadas:
SISTEMA Y APARATO DE ILUMINACIÓN PARA EXPERIMENTOS ÓPTICOS, del 22 de Mayo de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: La invención se refiere a un sistema y aparato de iluminación, para la iluminación de experimentos ópticos, en donde el sistema comprende una fuente de poder, […]
SISTEMA DE AUTO COLIMACIÓN PARA UN TELESCOPIO; TELESCOPIO REFLECTOR NEWTONIANO; Y MÉTODO PARA COLIMAR UN TELESCOPIO, del 22 de Mayo de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Sistema y método de auto colimación para un telescopio, el cual permite mantener el telescopio colimado ante deformaciones que pueda sufrir su estructura en cualquier instante […]
Método y aparato para montar componentes ópticos, del 1 de Enero de 2020, de M Squared Lasers Limited: Un aparato de montaje óptico para montar uno o más componentes ópticos , comprendiendo el aparato una placa base que tiene una primera superficie en la […]
Dispositivo con doble accionamiento para barrido secuencial y procedimiento asociado, del 1 de Enero de 2020, de THALES: Dispositivo con doble impulso para barrido secuencial que comprende: - una parte móvil que comprende un armazón […]
Estructura óptica con crestas dispuestas a la misma y procedimiento para producir la misma, del 28 de Mayo de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Aparato que comprende: una estructura óptica ; al menos dos crestas (14;14a-p), cada una conectando la estructura óptica a una estructura de soporte ; […]
Espejo de película fina, del 11 de Abril de 2018, de L-3 Communications Link Simulation and Training UK Limited: Un espejo de película fina adecuado para el uso en un simulador, que comprende: una cubierta de espejo ; una película reflectante […]
 Sistema para el tratamiento de señales de energía, del 26 de Julio de 2017, de Ocular Robotics Pty Limited (ACN 120 262 231): Sistema de tratamiento de señales de energía para dirigir señales de energía sustancialmente a lo largo de un eje de trayectoria preseleccionada , dicho sistema de tratamiento […]
Sistema para el tratamiento de señales de energía, del 26 de Julio de 2017, de Ocular Robotics Pty Limited (ACN 120 262 231): Sistema de tratamiento de señales de energía para dirigir señales de energía sustancialmente a lo largo de un eje de trayectoria preseleccionada , dicho sistema de tratamiento […]
Instrumento de ondas aéreas para la medición de perturbaciones del frente de ondas ópticas en el flujo de aire alrededor de sistemas de aeronaves, del 13 de Julio de 2016, de THE BOEING COMPANY: Una aeronave , que comprende: un fuselaje y al menos una superficie de interfaz aerodinámica ; un sistema de espejos con suspensión cardán […]