Dispositivo portable y método de control mediante gestos.
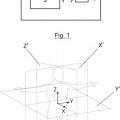
Dispositivo portable y método de control mediante gestos. El dispositivo portable (1) comprende una unidad de control (3) y un módulo de medición de la aceleración (2) en al menos tres ejes diferentes.
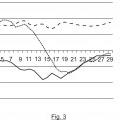
La unidad de control (3) detecta una señal de disparo (400) ejecutada por un usuario (10) que porta el dispositivo portable (1) previamente a la realización de un gesto de comando (500) realizado por el mismo usuario (10) y, a partir de dicha detección, inicia la identificación del gesto de comando (500) empleando los datos de aceleración del módulo de medición de la aceleración (2), y obtiene una orden (112) para control de un dispositivo, bien el propio dispositivo portable (1) o un dispositivo externo (5). La señal de disparo puede ser un gesto que porte información adicional que sirva para determinar el dispositivo concreto, o una función del mismo, a controlar. El dispositivo portable puede ser un dispositivo vestible en la extremidad superior del usuario (10), como un reloj inteligente.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430836.
Solicitante: SAMSUNG ELECTRONICS IBERIA, S.A.U.
Nacionalidad solicitante: España.
Inventor/es: CALVO FERNANDEZ,FRANCISCO, MARTÍNEZ FERNÁNDEZ,Raúl, FERNÁNDEZ HIDALGO,Fernando, CEREZO LUNA,Alfredo, MARTÍNEZ ANDRÉS,Pablo Abelardo, GÓMEZ BERTOLI,Débora.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F3/01 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 3/00 Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz. › Disposiciones de entrada o disposiciones combinadas de entrada y salida para la interacción entre el usuario y el computador (G06F 3/16 tiene prioridad).
- G06F3/03 G06F 3/00 […] › Disposiciones para convertir en forma codificada la posición o el desplazamiento de un elemento.
- G06K9/00 G06 […] › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
PDF original: ES-2552881_A1.pdf


Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]