Palanca de cambio de velocidades secuencial para bicicletas.
Palanca de cambio de velocidades para bicicletas, que presenta un hueco (22) que se extiende según un eje principal (X),
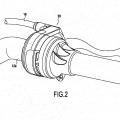
estando dicha palanca (20) configurada para montarse de manera coaxial sobre una empuñadura de manillar (12a) de bicicleta, comprendiendo dicha palanca (20):
- un elemento fijo (24) configurado para unirse a la empuñadura del manillar (12a),
- una empuñadura giratoria (26) coaxial al eje principal (X) y móvil en rotación alrededor del eje principal (X),
- un elemento de arrastre (28) móvil en rotación alrededor del eje principal (X) y configurado para arrastrar el extremo (16a) de un cable de mando de un desviador (14),
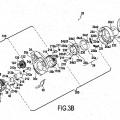
- unos medios de acoplamiento (100) configurados para acoplar en rotación la empuñadura giratoria (26) y el elemento de arrastre (28), estando dicha palanca (20) caracterizada por que comprende además unos medios de colocación secuencial (200) que cooperan con los medios de acoplamiento (100) y con la empuñadura giratoria (26), de manera que cuando la empuñadura giratoria (26) se desplaza en un primer sentido de rotación de mando (R1) desde una posición neutra (N) hacia una primera posición (P1) o en un segundo sentido de rotación de mando (R2), opuesto al primer sentido de rotación de mando (R1), desde la posición neutra (N) hacia una segunda posición (P2), los medios de colocación secuencial (200) vuelven a llevar la empuñadura giratoria (26) automáticamente a la posición neutra (N), desplazándose el elemento de arrastre (28) un ángulo predeterminado (ß) en un primer sentido de rotación de arrastre (R'1) desde una primera posición inicial (P') hacia una primera posición final (P'1) durante los desplazamientos de la empuñadura giratoria (26) entre la posición neutra (N) y la primera posición (P1), mientras que el elemento de arrastre (28) se desplaza del ángulo predeterminado (ß) en un segundo sentido de rotación de arrastre (R'2), opuesto al primer sentido de rotación de arrastre (R'1), desde una segunda posición inicial (P') hacia una segunda posición final (P'2) durante los desplazamientos de la empuñadura giratoria (26) entre la posición neutra (N) y la segunda posición (P2).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13155209.
Solicitante: DECATHLON.
Nacionalidad solicitante: Francia.
Dirección: 4, BOULEVARD DE MONS 59650 VILLENEUVE D'ASCQ FRANCIA.
Inventor/es: HE,YUE, LEMAITRE,BENOIT.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62K23/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62K CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS ESPECIALMENTE A LOS CICLOS; SUSPENSION DE CUBOS DE RUEDAS DE CICLOS; SIDECARS, REMOLQUES DELANTEROS O VEHICULOS ADICIONALES SIMILARES PARA CICLOS. › B62K 23/00 Parte inicial de mandos accionados por el conductor y adaptada especialmente a los ciclos, p. ej. palancas, mangos (adaptada especialmente a los mecanismos de frenado de ciclos B62L 3/00). › Mangos giratorios.
- B62M25/04 B62 […] › B62M PROPULSION POR EL CONDUCTOR DE VEHICULOS DE RUEDAS O DE TRINEOS; PROPULSION POR MOTOR DE TRINEOS O DE CICLOS; TRANSMISIONES ADAPTADAS ESPECIALMENTE A ESTOS VEHICULOS (disposiciones o montaje de transmisiones de vehículos en general B60K; elementos de transmisión en sí F16). › B62M 25/00 Mandos para mecanismos de cambio de velocidad adaptados especialmente a los ciclos (mandos por ciclos accionados por el conductor, en general B62K 23/00; mecanismos de cambio de velocidad en sí F16H). › accionados a mano.
PDF original: ES-2513667_T3.pdf
Fragmento de la descripción:
Campo de la invención
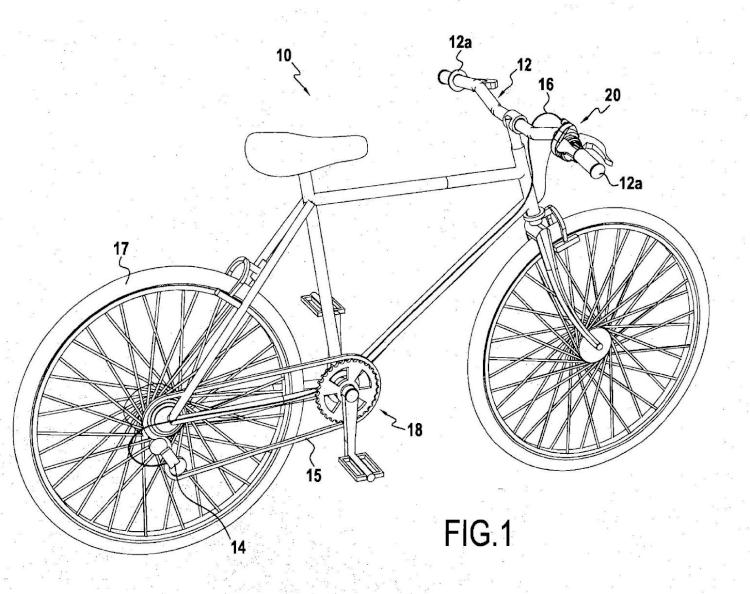
La invención se refiere a una palanca de cambio de velocidades para bicicletas o equivalente, y más particularmente a una palanca de cambio de velocidades configurada para montarse coaxialmente en la empuñadura de un manillar de bicicleta o equivalente.
Estado de la técnica anterior
La invención se refiere a una palanca de cambio de velocidades para bicicletas o equivalente, presentando un hueco que se extiende según un eje principal, estando dicha palanca configurada para montarse de manera coaxial sobre una empuñadura de manillar de bicicleta o equivalente, comprendiendo dicha palanca un elemento fijo configurado para unirse a la empuñadura del manillar, una empuñadura giratoria coaxial al eje principal y móvil en rotación alrededor del eje principal, un elemento de arrastre móvil en rotación alrededor del eje principal y configurado para tirar del extremo de un cable de mando de un desviador, y unos medios de acoplamiento configurados para acoplar en rotación la empuñadura giratoria y el elemento de arrastre.
Este tipo de palanca presenta el inconveniente de que para cambiar de velocidad, el recorrido de rotación de la empuñadura giratoria es a veces considerable, en particular cuando se desea cambiar varias velocidades sucesivamente en un mismo sentido (es decir, para "subir" o "bajar" con respecto a varias marchas sucesivas). Este recorrido angular puede alcanzar 70° (un ángulo de setenta grados) o más. Por otra parte, si la palanca, y más específicamente la empuñadura, presenta un gran diámetro, el recorrido en rotación (es decir, acimutal) de la empuñadura puede ser superior a 5 cm (cinco centímetros). Un recorrido angular y/o acimutal de este tipo resulta incómodo para el usuario, e incluso imposible para los usuarios que tengan las manos pequeñas, como los niños y los jóvenes adolescentes. Por otra parte, al cambiarse las velocidades sucesivamente a lo largo del recorrido giratorio de la empuñadura, la manipulación de la empuñadura para alcanzar una velocidad predeterminada es con frecuencia imprecisa, de modo que el usuario no está seguro de que su acción de comando sobre la empuñadura haya desplazado el desviador a la velocidad deseada.
El documento US 2006/053937 también describe una palanca de cambio de velocidades.
Presentación de la invención
El objetivo de la presente invención es el de remediar los inconvenientes anteriormente mencionados.
La invención alcanza su objetivo proponiendo una palanca de cambio de velocidades para bicicletas o equivalentes del tipo mencionado que comprende además unos medios de colocación secuencial que cooperan con los medios de acoplamiento y con la empuñadura giratoria, de manera que cuando la empuñadura giratoria se desplaza en un primer sentido de rotación de mando desde una posición neutra hacia una primera posición o en un segundo sentido de rotación de mando, opuesto al primer sentido de rotación de mando, desde la posición neutra hacia una segunda posición, los medios de colocación secuencial vuelven a llevar a la empuñadura giratoria automáticamente a la posición neutra, desplazándose el elemento de arrastre un ángulo predeterminado en un primer sentido de rotación de arrastre desde una primera posición inicial hacia una primera posición final durante los desplazamientos de la empuñadura giratoria entre la posición neutra y la primera posición, mientras que el elemento de arrastre se desplaza del ángulo predeterminado en un segundo sentido de rotación de arrastre, opuesto al primer sentido de rotación de arrastre, desde una segunda posición inicial hacia una segunda posición final durante los desplazamientos de la empuñadura giratoria entre la posición neutra y la segunda posición.
Se entiende que el término "bicicleta o equivalente " se refiere por supuesto a bicicletas y triciclos, pero también a todo tipo de vehículo velocípedo. En lo que sigue, podrá utilizarse el término "empuñadura" en vez de "empuñadura giratoria". Asimismo, podrá utilizarse el término "palanca" en vez de "palanca de cambio de velocidades".
Se entiende que la empuñadura del manillar de la bicicleta o del velocípedo está embutida en el hueco de la palanca de cambio de velocidades. De este modo, el elemento fijo y la empuñadura giratoria están configurados para disponerse coaxialmente alrededor de la empuñadura del manillar. El eje de revolución de la empuñadura giratoria y del elemento de arrastre coinciden ligeramente con el eje principal.
Se entiende que los desplazamientos de la empuñadura entre la posición neutra y la primera posición comprenden la rotación de la empuñadura en el primer sentido de rotación de mando desde la posición neutra hacia la primera posición y la rotación de la empuñadura en el segundo sentido de rotación de mando desde la primera posición hacia la posición neutra. Asimismo, los desplazamientos de la empuñadura entre la posición neutra y la segunda posición comprenden la rotación de la empuñadura en el segundo sentido de rotación de mando desde la posición neutra hacia la segunda posición y la rotación de la empuñadura en el primer sentido de rotación de mando desde la
segunda posición hacia la posición neutra.
Gracias a los medios de acoplamiento, los desplazamientos de la empuñadura conllevan un desplazamiento del elemento de arrastre en el primer sentido de rotación de arrastre o en el segundo sentido de rotación de arrastre. Asi la manipulación de la empuñadura permite comandar un cable de desviador, por ejemplo un cable de tipo Bowden®, del que se fija un extremo al elemento de arrastre.
Se entiende que los medios de colocación secuencial están dispuestos entre la empuñadura y los medios de acoplamiento en la cadena de transmisión de los desplazamientos desde la empuñadura hacia los medios de acoplamiento.
Los medios de colocación secuencial permiten cambiar de velocidad desplazando la empuñadura entre la posición neutra y la primera posición, por ejemplo para pasar de una velocidad T a una velocidad T+1, o desplazando la empuñadura entre la posición neutra y la segunda posición, por ejemplo para pasar de una velocidad T a una velocidad T-1 (o a la inversa).
Los medios de colocación secuencial dispuestos entre la empuñadura y los medios de acoplamiento en la cadena de transmisión de movimientos, permite obtener un recorrido angular de la empuñadura entre la posición neutra y la primera posición y entre la posición neutra y la segunda posición reducida, es decir Inferior a 45°. Lo mismo ocurre con el recorrido en rotación de la empuñadura, que se reduce, es decir, es inferior a 3 cm. Preferentemente, los medios de acoplamiento y los medios de colocación secuencial están configurados de manera que el recorrido angular de la empuñadura entre la posición neutra sea inferior a 35°, y el recorrido angular de empuñadura entre la primera posición y el recorrido angular entre la posición neutra y la segunda posición sea Igualmente Inferior a 35°. De este modo, el recorrido angular y el recorrido en rotación de la empuñadura están adaptados a las personas que tienen las manos pequeñas, como por ejemplo, los niños y los jóvenes adolescentes.
Además, al volver la empuñadura automáticamente a la posición neutra después de cada desplazamiento hacia la primera o la segunda posición, se garantiza que el recorrido angular de la empuñadura es constante, sea cual sea la posición inicial del elemento de arrastre, es decir, sea cual sea la velocidad en la que el desviador esté posicionado. De este modo, se garantiza que el recorrido angular de la empuñadura está adaptado a las personas con las manos pequeñas en todas las configuraciones de uso.
Por otro lado, cada manipulación de la empuñadura entre la posición neutra y la primera posición o la segunda posición permite cambiar una sola velocidad. De este modo, el usuario sabe que cuando la empuñadura ha vuelto a la posición neutra tras haber manipulado la empuñadura, se ha cambiado una sola velocidad. En otras palabras, el usuario sabe que ha pasado de la velocidad T a la velocidad T+1, o de la velocidad T a la velocidad T-1. En consecuencia, la palanca de acuerdo con la invención permite un cambio de velocidades preciso, que no presenta ninguna incertidumbre en cuanto a la marcha introducida tras haber manipulado la empuñadura giratoria.
Ventajosamente, los medios de colocación secuencial comprenden al menos un muelle de retorno dispuesto entre el elemento fijo y la empuñadura giratoria, permitiendo dicho al menos un muelle de retorno que la empuñadura giratoria vuelva automáticamente a la posición neutra.
Se entiende que el muelle puede ser un muelle de torsión o un muelle... [Seguir leyendo]
Reivindicaciones:
1. Palanca de cambio de velocidades para bicicletas, que presenta un hueco (22) que se extiende según un eje principal (X), estando dicha palanca (20) configurada para montarse de manera coaxial sobre una empuñadura de manillar (12a) de bicicleta, comprendiendo dicha palanca (20):
- un elemento fijo (24) configurado para unirse a la empuñadura del manillar (12a),
- una empuñadura giratoria (26) coaxial al eje principal (X) y móvil en rotación alrededor del eje principal (X),
- un elemento de arrastre (28) móvil en rotación alrededor del eje principal (X) y configurado para arrastrar el extremo (16a) de un cable de mando de un desviador (14),
- unos medios de acoplamiento (100) configurados para acoplar en rotación la empuñadura giratoria (26) y el elemento de arrastre (28), estando dicha palanca (20) caracterizada por que comprende además unos medios de colocación secuencial (200) que cooperan con los medios de acoplamiento (100) y con la empuñadura giratoria (26), de manera que cuando la empuñadura giratoria (26) se desplaza en un primer sentido de rotación de mando (R1) desde una posición neutra (N) hacia una primera posición (P1) o en un segundo sentido de rotación de mando (R2), opuesto al primer sentido de rotación de mando (R1), desde la posición neutra (N) hacia una segunda posición (P2), los medios de colocación secuencial (200) vuelven a llevar la empuñadura giratoria (26) automáticamente a la posición neutra (N), desplazándose el elemento de arrastre (28) un ángulo predeterminado ((3) en un primer sentido de rotación de arrastre (R'1) desde una primera posición inicial (P1) hacia una primera posición final (P'1) durante los desplazamientos de la empuñadura giratoria (26) entre la posición neutra (N) y la primera posición (P1), mientras que el elemento de arrastre (28) se desplaza del ángulo predeterminado ((3) en un segundo sentido de rotación de arrastre (R'2), opuesto al primer sentido de rotación de arrastre (R'1), desde una segunda posición inicial (P`) hacia una segunda posición final (P'2) durante los desplazamientos de la empuñadura giratoria (26) entre la posición neutra (N) y la segunda posición (P2).
2. Palanca de acuerdo con la reivindicación 1, en la que los medios de colocación secuencial (200) comprenden al menos un muelle de retorno (220a, 220b) dispuesto entre el elemento fijo (24) y la empuñadura giratoria (26), permitiendo dicho al menos un muelle de retorno (220a, 220b) volver a llevar la empuñadura giratoria (26) automáticamente a la posición neutra (N).
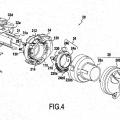
3. Palanca de acuerdo con la reivindicación 1 o 2, en la que los medios de acoplamiento (100) comprenden una primera rueda dentada (110) acoplada en rotación con la empuñadura giratoria (26), y los medios de colocación secuencial (200) comprenden al menos un primer trinquete (210) montado en la empuñadura giratoria (26) y que se encaja en un diente de entre unos primeros dientes (111) de la primera rueda dentada (110), estando el primer trinquete (210) y los primeros dientes (111) configurados para arrastrar la primera rueda (110) en rotación cuando la empuñadura giratoria (26) gira en el primer sentido de rotación de mando (R1), mientras que el primer trinquete (210) se desencaja de los primeros dientes (111) cuando la empuñadura giratoria (26) gira en el segundo sentido de rotación de mando (R2).
4. Palanca de acuerdo con la reivindicación 3, en la que los medios de colocación secuencial (200) comprenden al menos una primera leva (230) unida al elemento fijo (24), desencajando dicha al menos una primera leva (230) dicho al menos un primer trinquete (210) de los primeros dientes (111) cuando la empuñadura giratoria (26) se lleva de la posición neutra (N) hacia la segunda posición (P2).
5. Palanca de acuerdo con una cualquiera de las reivindicaciones 1 a 4, en la que los medios de acoplamiento (100) comprenden una segunda rueda dentada (130) acoplada en rotación con el elemento de arrastre (28), y los medios de colocación secuencial (200) comprenden un segundo trinquete (212) montado sobre el elemento fijo (24) y que se encaja en un diente de entre unos segundos dientes (136) de la segunda rueda dentada (130), estando el segundo trinquete (212) y los segundos dientes (136) configurados para permitir los desplazamientos en rotación de la segunda rueda dentada (130) en el primer sentido de rotación de arrastre (R'1) y para bloquear los desplazamientos en rotación de la segunda rueda dentada (130) en el segundo sentido de rotación de arrastre (R'2).
6. Palanca de acuerdo con la reivindicación 5, en la que los medios de colocación secuencial (200) comprenden una segunda leva (232) unida a la empuñadura giratoria (26), desencajando dicha segunda leva (232) el segundo trinquete (212) de los segundos dientes (136) cuando la empuñadura giratoria (26) se lleva de la posición neutra (N) hacia la segunda posición (P2).
7. Palanca de acuerdo con una cualquiera de las reivindicaciones 1 a 6, en la que los medios de acoplamiento (100) comprenden una segunda rueda dentada (130) acoplada en rotación con el elemento de arrastre (28), y los medios de colocación secuencial (200) comprenden un tercer trinquete (214) montado sobre el elemento fijo (24), estando dicho tercer trinquete (214) configurado para encajarse en un diente de entre unos terceros dientes (138) de la segunda rueda dentada (130) cuando la empuñadura giratoria (26) está en la segunda posición (P2), mientras que el tercer trinquete (214) se desencaja de los terceros dientes (138) cuando la empuñadura giratoria (26) está en posición neutra (N) o en la primera posición (P1).
8. Palanca de acuerdo con la reivindicación 7, en la que los medios de colocación secuencial (200) comprenden una tercera leva (234) unida a la empuñadura giratoria (26), encajando dicha tercera leva (234) el tercer trinquete (214) con un diente de entre los terceros dientes (138) cuando la empuñadura giratoria (26) se lleva de la posición neutra (N) hacia la segunda posición (P2).
9. Palanca de acuerdo con las reivindicaciones 6 a 8, en la que la segunda leva (232) y la tercera leva (234) están configuradas para que el tercer trinquete (214) se encaje en un tercer diente (138) antes de que el segundo trinquete (212) se desencaje de los segundos dientes (136) cuando se lleve la empuñadura giratoria (26) de la posición neutra (N) hacia la segunda posición (P2).
10. Palanca de acuerdo con una cualquiera de las reivindicaciones 1 a 9, en la que el primer sentido de rotación de mando (R1) y el primer sentido de rotación de arrastre (R'1) están orientados en el mismo sentido, mientras que el segundo sentido de rotación de mando (R2) y el segundo sentido de rotación de arrastre (R'2) están orientados en el mismo sentido.
11. Palanca de acuerdo con una cualquiera de las reivindicaciones 1 a 10, en la que los medios de acoplamiento (100) comprenden una primera rueda dentada (110) coaxial al eje principal (X) y acoplada en rotación con la empuñadura giratoria (26), una segunda rueda dentada (130) coaxial al eje principal (X) y acoplada en rotación con el elemento de arrastre (28), y un elemento intermedio (120) que presenta un eje de rotación paralelo a, y distinto del eje principal (X) y que acopla en rotación la primera rueda dentada (110) y la segunda rueda dentada (130), comprendiendo dicho elemento intermedio (120) una tercera rueda dentada (122) que engrana directamente la primera rueda dentada (110), y una cuarta rueda dentada (124) unida a la tercera rueda dentada (122), engranando dicha cuarta rueda dentada (124) directamente la segunda rueda dentada (130).
12. Palanca de acuerdo con una cualquiera de las reivindicaciones 1 a 11, en la que el hueco (22) es cilindrico y está formado por un manguito cilindrico (30), estando la empuñadura giratoria (26) y el elemento de arrastre (28) montados en rotación alrededor de dicho manguito cilindrico (30).
13. Palanca de acuerdo con las reivindicaciones 3 y 11 y una cualquiera de las reivindicaciones 1 a 12, en la que la primera rueda dentada (110) comprende una primera sección anular (110a) y una segunda sección anular (110b) adyacente a la primera sección anular (110a), y en la que los primeros dientes (111) se disponen en la periferia de la primera sección anular (110a) mientras que unos cuartos dientes (112) que engranan la tercera rueda dentada (122) se disponen en la periferia de la segunda sección anular (110b).
14. Palanca de acuerdo con las reivindicaciones 5, 7 y 11 y una cualquiera de las reivindicaciones 1 a 13, en la que la segunda rueda dentada (130) presenta cuatro sectores angulares distintos, unos quintos dientes (132) que engranan la cuarta rueda dentada (124) disponiéndose en la periferia de un primer sector angular (a1), disponiéndose el elemento de arrastre (28) en la periferia de un segundo sector angular (a2), disponiéndose los segundos dientes(136) en la periferia de un tercer sector angular (a3), y disponiéndose los terceros dientes(138) en la periferia de un cuarto sector angular (a4),
15. Palanca de acuerdo con una cualquiera de las reivindicaciones 1 a 14, en la que los medios de acoplamiento (100) forman un reductor de desplazamiento de modo que el recorrido angular ((32) del elemento de arrastre (28) sea inferior al recorrido angular ((31) de la empuñadura giratoria (26).
Patentes similares o relacionadas:
Mando de velocidad, del 31 de Julio de 2020, de ITURBE HERAS, Javier: 1. Mando de velocidad, para vehículos, del tipo que comprende un puño alrededor del eje de un acelerador, caracterizado porque comprende […]
Empuñadura de ajuste de velocidad de avance y retroceso para vehículo eléctrico y dispositivo de control de potencia de vehículo eléctrico, del 22 de Abril de 2020, de Nanjing Vmoto Co., Ltd: Una empuñadura de ajuste de velocidad de avance y retroceso de vehículo eléctrico, comprendiendo la empuñadura de ajuste de velocidad de avance y […]
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
 Máquina de trabajo autopropulsada de al menos un eje, del 28 de Diciembre de 2018, de RAPID TECHNIC AG: Máquina de trabajo autopropulsada de al menos un eje para accionar y/o hacer avanzar herramientas acopladas y/o vehículos remolcados, máquina de trabajo que presenta un […]
Máquina de trabajo autopropulsada de al menos un eje, del 28 de Diciembre de 2018, de RAPID TECHNIC AG: Máquina de trabajo autopropulsada de al menos un eje para accionar y/o hacer avanzar herramientas acopladas y/o vehículos remolcados, máquina de trabajo que presenta un […]
Estructura de unidad de funcionamiento para un vehículo de tipo sillín, del 18 de Abril de 2018, de HONDA MOTOR CO., LTD.: Una estructura de unidad de funcionamiento para un vehículo de tipo sillín que comprende: una empuñadura de acelerador que está ensamblada relativamente de manera […]
Dispositivo de acelerador, del 29 de Noviembre de 2017, de HONDA MOTOR CO., LTD.: Un dispositivo de acelerador que está montado en un manillar , e incluye un rotor que se gira con enclavamiento con la manipulación de una empuñadura de […]
SISTEMA DUAL DE ACELERACIÓN DE UN VEHÍCULO AUTOMÁTICO DE DOS O MAS RUEDAS, del 4 de Mayo de 2017, de ARNAU SÁNCHEZ, Juan Miguel: El sistema está previsto para poder efectuar la aceleración de un vehículo de dos o más ruedas direccionado mediante un manillar y con cambio automático o mono […]
Vehículo, del 3 de Mayo de 2017, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo incluyendo: un bastidor que tiene una rueda motriz ; un motor que genera par para girar la rueda motriz ; un dispositivo de ajuste […]