ORGANO MECANICO DE TRANSFORMACION DE MOVIMIENTOS LINEALES ALTERNATIVOS EN ROTATIVOS O VICEVERSA.
Organo mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa,
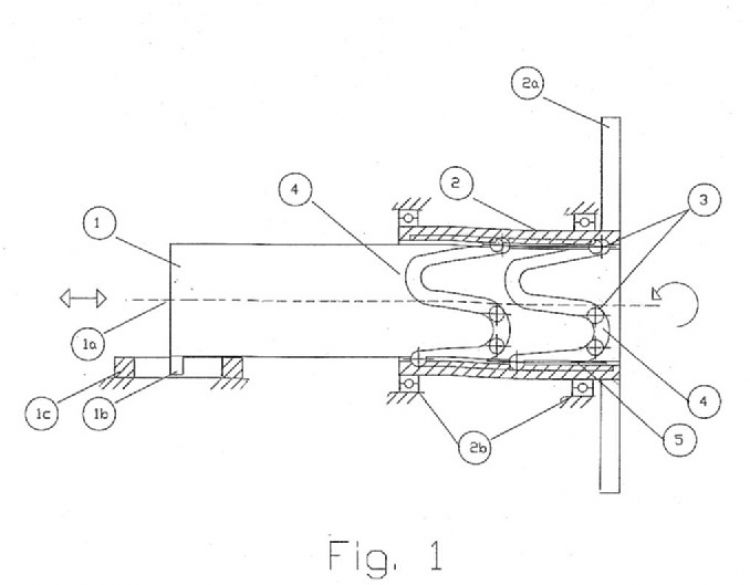
compuesto de un cilindro giratorio (2), con su superficie lateral interna labrada, con caminos paralelos (4), de forma sinusoidal y huella semiesférica. Estas trayectorias están distribuidas en partes iguales por esa superficie lateral, por ellas se desplazan dos tríos de bolas (3), situadas en estas trayectorias (4) y serán las que enlazan mecánicamente con el cilindro de desplazamiento lineal alternativo (1), concéntrico al anterior, en el que se labran las mismas trayectorias (4) externamente. Las bolas (3) son impulsadas por el órgano giratorio (2) (con desplazamiento lineal impedido), y obligadas a seguir los caminos labrados (4), estas empujan al órgano de desplazamiento lineal (1) (con movimiento giratorio impedido). También puede funcionar al contrario.
Puede utilizarse, para el accionamiento de émbolos de compresores, motores u otras máquinas que precisen de desplazamientos lineales combinados con rotativos, simplificando los sistemas actuales
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200702767.
Solicitante: VALLE SANCHEZ,JOAQUIN.
Nacionalidad solicitante: España.
Provincia: ALICANTE.
Inventor/es: VALLE SANCHEZ,JOAQUIN.
Fecha de Solicitud: 22 de Octubre de 2007.
Fecha de Publicación: .
Fecha de Concesión: 29 de Junio de 2010.
Clasificación Internacional de Patentes:
- F16H25/12 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 25/00 Transmisiones que implican esencialmente y únicamente sistemas de leva y ruleta o mecanismos de tornillo y tuerca. › con un movimiento alternativo según el eje de rotación, p. ej. transmisiones mediante gargantas helicoidales e inversión automática.
Clasificación PCT:
- F16H25/12 F16H 25/00 […] › con un movimiento alternativo según el eje de rotación, p. ej. transmisiones mediante gargantas helicoidales e inversión automática.
Fragmento de la descripción:
Órgano mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa.
Sector de la técnica
La invención se refiere a un órgano mecánico de transformación de movimientos, con una unión de movimiento giratorio y otra de movimiento lineal, acopladas a dicho órgano, de tal modo que mediante dicho órgano, se produce la transformación.
Estado de técnica
Actualmente, todos los sistemas mecánicos de transformación continua de movimientos lineales en rotativos o viceversa, son de gran complejidad mecánica, en cuanto al numero de piezas o altos costos de fabricación.
De todos ellos, el más sencillo sea quizás, el de biela-manivela, pero su funcionamiento, provoca grandes vibraciones por fuerzas de inercia en la biela, además de fuerzas laterales en el órgano de desplazamiento lineal, originando desgaste prematuros de sus elementos, además es de dimensiones relativamente grandes y no permite variaciones entre el giro del órgano giratorio y el desplazamiento del otro órgano.
Explicación. Objeto de la invención
Se quiere obtener un sistema mecánico sencillo, con el menor número de piezas posible, de fácil y económica fabricación, que además, sea de reducido tamaño y evite al máximo las vibraciones y fuerzas laterales sobre el órgano de desplazamiento lineal, de los mecanismos actuales.
Se pretende además, que el órgano permita que la transformación entre el movimiento lineal y el rotativo pueda tener la pauta deseada (relación entre el ángulo de rotación y desplazamiento de la parte lineal), según la aplicación del mecanismo.
La presente invención, reduce sensiblemente las vibraciones, fuerzas laterales, así como las fuerzas de rozamiento del mecanismo en global. Posee además un tamaño más reducido y permite el diseño de distintos desplazamientos en función del ángulo girado, con sólo variar la forma de las trayectorias guía, según el diseño deseado, permitiendo una mayor aproximación de los sistemas mecánicos a curvas termodinámicas o de funcionamiento de ciclos de máquinas.
Descripción detallada
La presente invención se refiere a un sistema mecánico de transformación continua de movimientos lineales en rotativos o viceversa.
Este sistema, según reivindicación 1, esta compuesto por un cilindro como elemento de desplazamiento lineal y otro cilindro hueco, situado concéntricamente al anterior, con la holgura adecuada, como órgano de movimiento rotativo. Ambos cilindros están acoplados mecánicamente mediante dos tríos de bolas (uno por trayecto) que ruedan por dos trayectorias sinusoidales, iguales y de huella semiesférica, labradas sobre la superficie lateral de ambos cilindros, en la cara lateral externa del cilindro interior y en la cara lateral interna del cilindro hueco. El movimiento giratorio del cilindro externo (con desplazamiento impedido por los apoyos de giro) obliga a las bolas a recorrer las trayectorias labradas y obligan a desplazarse axialmente al otro cilindro interior (de giro impedido por una guía de desplazamiento), para poder seguir su rodadura. Las bolas van colocadas en una jaula que hace de separador de estas, situada en la holgura de ambos cilindros concéntricos, así se mantienen las bolas en una posición fija de unas con respecto a otras, permitiendo su rodadura y no su desalineación en su camino por las trayectorias. Estas posiciones se fijan en dos planos perpendiculares al eje de rotación del mecanismo, con tres bolas por trayectoria, y en la misma posición para ambos caminos, estos caminos disponen de tres crestas y tres valles cada uno, siendo el paso de las bolas por ellos, el inicio del cambio de sentido del movimiento axial.
El sistema, según reivindicación 2, consta de los mismos sistemas mecánicos que la reivindicación 1, pero con el número de caminos guía aumentado a tres o más, así como el número de tríos de bolas, uno por camino nuevo, según la carga de trabajo que se le aplique al mecanismo, pues son las bolas las que soportan dichas cargas en la transformación del movimiento. El tamaño de la jaula separadora se ajustará al número de bolas que ha de alojar.
Según reivindicación 3, las trayectorias pueden no ser sinusoidales y ser de otras formas cerradas, con cambios suaves de curvatura, para ajustar la rotación y el desplazamiento de cada uno de los órganos a lo deseado, según necesidades de transformación del mecanismo.
En un desarrollo de la reivindicación 4, sólo se utiliza un camino guía y un trío de bolas, pero como ya sólo existe un apoyo entre ambos cilindros, que es el trió de bolas, se precisa de un cojinete de deslizamiento entre los cilindros que permita rodadura y deslizamiento axial, para darles el apoyo quitado con la eliminación de un trío de bolas. El tamaño de la jaula separadora se ajustará al número de bolas que ha de alojar.
En un desarrollo de la reivindicación 5, queda simplificado el mecanismo a un solo camino guía y sin las tres cresta y valles de reivindicaciones anteriores, así sólo existe una bola y sin jaula. Se precisan dos cojinetes de deslizamiento entre los cilindros, en los extremos del cilindro de movimiento rotativo, que permita rodadura y deslizamiento axial, para darles a estos el apoyo quitado con la eliminación de dos de las bolas. El tamaño de la jaula separadora se ajustará al número de bolas que ha de alojar.
En un desarrollo de la reivindicación 6, será el órgano (1) el que disponga de los apoyos que le impidan desplazarse linealmente y si rotar y el órgano (2) el que tenga el movimiento lineal alternativo, al tener apoyos que impiden su giro.
Descripción figuras
La Fig. 1 representa el mecanismo completo que consta de:
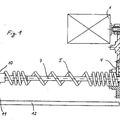
La Fig. 2 representa una vista tridimensional simplificada del mecanismo, en el que se ven la situación da las seis bolas (3) en las trayectorias (4).
La Fig. 3 es el desarrollo de las trayectorias guía (4) de la parte rotativa (2). La forma y número de estas, variará según las reivindicaciones 2, 3, 4 y 5.
La Fig. 4 es la sección de la parte rotativa (2), en la que se ven las trayectorias (4), en la cara interna del cilindro hueco (2).
La Fig. 5 es el desarrollo de las trayectorias guía (4) de la parte de movimiento lineal (1). La forma y número de estas, variará según las reivindicaciones 2, 3, 4 y 5.
La Fig. 6 es la vista de la parte de movimiento lineal (1), en la que se ven las trayectorias (4) de la cara lateral.
La Fig. 7 es el desarrollo de la jaula separadora (5) con los seis huecos (5a) para las bolas (3). El número de huecos, variará según las reivindicaciones 2, 4 y 5.
Explicación figuras
La entrada de movimiento de forma lineal alternativa, se puede realizar por la unión (1a) que conecta con el órgano (1), saliendo de forma rotativa por unión (2a), conectada al órgano (2) o viceversa. Suponiendo este caso de entrada de movimiento lineal por la unión (1a), esta unión desplaza axialmente al cilindro (1), forzando a las bolas (3) a rodar por los caminos guías (4), estas bolas empujan en su rodadura al cilindro (2), el cual al estar impedido su desplazamiento axial por los apoyos de rodadura (2b), y tener la rodadura impedida el cilindro (1) por la guía de desplazamiento (1b) y (1c), obliga al órgano (2) a rotar sobre su eje longitudinal, siempre en el mismo sentido de rotación, mientras que el órgano (2) posee un movimiento lineal alternativo continuo. La jaula separadora (5) de las bolas se va moviendo axialmente...
Reivindicaciones:
1. Órgano mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa, con:
- una unión (1a) de movimiento giratorio y
- una unión (2a) de movimiento lineal alternativo.
Se caracteriza por:
- Un cilindro (1) acoplado ala unión (1a), con una guía deslizante (1b), (1c), para evitar su giro. Este tiene movimiento lineal alternativo, en cuya superficie lateral van tallados dos caminos guía (4), paralelos, de huella semiesférica y forma sinusoidal con tres crestas y tres valles distribuidos por igual en esa superficie, dispuestos en dos planos perpendiculares al eje de desplazamiento.
- Otro cilindro (2), hueco, situado concéntricamente al anterior y acoplado a la unión (2a), con apoyos rotativos (2b), que impiden su desplazamiento axial, y en cuya superficie lateral interior se labran los dos mismos caminos guía (4) del cilindro anterior.
- Dos tríos de bolas (3), que se sitúan entre ambos cilindros, en planos paralelos cada trió, estas rodarán por los caminos guía y serán las encargadas de enlazar mecánicamente los dos cilindros (1) y (2) anteriores, transformando el movimiento.
- Jaula separadora (5), con dos tríos de alojamientos (5a), en la que sitúan las bolas (3) y que permite la rodadura de estas evitando su desalineación, desplazándose en movimiento rotatorio y alternativo lineal acompañando a las bolas (3) en su posición concéntrica entre los cilindros (1) y (2).
2. Órgano mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa, según reivindicación 2, caracterizado por:
- Un número de caminos guía (4) aumentado a tres o más, según aumente la carga o fuerza aplicada al mecanismo para transformar, así aumenta también el número de bolas (3), un trío por cada camino nuevo, así como la capacidad de la jaula separadora (5) de admitir nuevas bolas (3).
3. Órgano mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa, según reivindicación 1 y 2, caracterizado por:
- La forma de los caminos guía (4) puede ser no sinusoidal, siempre que sea una curva cerrada y con cambios suaves de curvatura, que no impida le rodadura suave de las bolas (3), permitiendo así ajustar la posición de giro del cilindro rotativo (2) al desplazamiento deseado del órgano (1).
4. Órgano mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa, según reivindicación 1, 2 y 3, caracterizado por:
- Un solo camino guía (4) labrado en ambos cilindros (1) y (2), con un solo trío de bolas (3), y un cojinete de de apoyo (6) entre ambos cilindros para evitar su desalineación. La jaula separadora (5) se reduce para alojar sólo a tres bolas (3).
5. Órgano mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa, según reivindicación 3, caracterizado por:
- Un camino sinusoidal o no con una sola bola (3) sin jaula (5) y con dos cojinetes de deslizamiento en los extremos del cilindro (1).
6. Órgano mecánico de transformación de movimientos lineales alternativos en rotativos o viceversa, según reivindicaciones de 1 a 5, caracterizado por:
- Se intercambian los apoyos rotativos (2b) del órgano (2) al órgano (1), así como los apoyos (1b) y (1c) del órgano (1) al (2), con lo que intercambian sus movimientos, ahora el (1) tiene movimiento rotativo y el (2) lineal alternativo.
Patentes similares o relacionadas:
Engranaje y procedimiento de fabricación para un engranaje, del 20 de Marzo de 2019, de WITTENSTEIN SE: Engranaje , en especial engranaje coaxial o engranaje lineal, con - un dentado , - un soporte de dientes con guías orientadas radialmente, - […]
Dispositivo de automatización industrial, del 5 de Julio de 2017, de Telerobot S.p.A: Dispositivo de automatización industrial que comprende una pluralidad de grupos de manipulación aptos para manipular un objeto, en una dirección de manipulación […]
METODO Y DISPOSITIVO DE ACCIONAMIENTO PARA UN INTERRUPTOR HELICOIDAL, del 12 de Mayo de 2016, de GORLAN TEAM, S.L.U: Método y dispositivo de accionamiento que permite convertir mecánicamente un movimiento rotatorio en un movimiento helicoidal, incluyendo dicho movimiento helicoidal […]
Procedimiento y dispositivo de accionamiento para un interruptor helicoidal, del 11 de Mayo de 2016, de GORLAN TEAM, S.L.U: Dispositivo de accionamiento para convertir mecánicamente un movimiento rotatorio en un movimiento helicoidal, caracterizado por que comprende: un cuerpo fijo […]
Engranaje y uso de un engranaje semejante, del 14 de Mayo de 2014, de WITTENSTEIN AG: Engranaje para la conversión de un movimiento de rotación alrededor de un eje longitudinal del engranaje en una movimiento lineal en la dirección del eje longitudinal […]
Dispositivo de transmisión para transmitir un par y dispositivo para generar o convertir un par, del 14 de Octubre de 2013, de Thien, Gerhard: Dispositivo de transmisión para transmitir un par con: - un árbol motor que está diseñado para girar a una primera velocidad de rotación, - un árbol […]
Conjunto de transmisión de esfuerzos y conjunto de mando que comprende un conjunto de este tipo, del 4 de Septiembre de 2013, de Fly By Wire Systems France: Conjunto de transmisión de esfuerzos que permite en particular la transmisión de esfuerzos entre una palancay un órgano direccional, […]
 DISPOSITIVO PARA EXTRAER UN MEDIO DE CONSUMO ANALITICO DE UN RECIPIENTE DE ALMACENAMIENTO, del 1 de Diciembre de 2007, de ROCHE DIAGNOSTICS GMBH: Dispositivo para extraer un medio de consumo analítico, en particular un elemento de prueba , de un recipiente de almacenamiento , de manera que el recipiente […]
DISPOSITIVO PARA EXTRAER UN MEDIO DE CONSUMO ANALITICO DE UN RECIPIENTE DE ALMACENAMIENTO, del 1 de Diciembre de 2007, de ROCHE DIAGNOSTICS GMBH: Dispositivo para extraer un medio de consumo analítico, en particular un elemento de prueba , de un recipiente de almacenamiento , de manera que el recipiente […]