Motor ultrasónico poliédrico accionado por rosca.
Un motor ultrasónico poliédrico de accionamiento por rosca de tornillo que comprende un estátor (33;
41; 51) y unrotor (32; 43; 53), en el que el estátor o el rotor tiene forma de poliedro y los elementos piezoeléctricos (31; 42; 52)están adheridos al poliedro, caracterizado por que las ondas progresivas de flexión dentro del plano o las ondasestacionarias alrededor del círculo del poliedro pueden excitarse en el estátor (33; 41; 51) o en el rotor (32; 43; 53) yse proporcionan roscas de tornillo coincidentes entre sí en la superficie de contacto entre el estátor (33; 41; 51) y elrotor (32; 43; 53).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CN2006/003088.
Solicitante: TSINGHUA UNIVERSITY.
Nacionalidad solicitante: China.
Dirección: QUINGHUAYUAN, HAIDIAN DISTRICT BEIJING 100084 CHINA.
Inventor/es: LI, YI, ZHOU,TIEYING, LU,CUNYUE, CHEN,YU, FU,DEYONG, HU,XIAOPING, TIAN,BIN, WANG,ZHENGPING.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02N2/02 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02N MAQUINAS ELECTRICAS NO PREVISTAS EN OTRO LUGAR. › H02N 2/00 Máquinas eléctricas en general que utilizan el efecto piezoeléctrico, la electroestricción o la magnetoestricción (producción de vibraciones mecánicas en general B06B; elementos piezoeléctricos electroestrictivos o magnetoestrictivos en general H01L 41/00). › que producen un movimiento lineal, p. ej. actuadores; Posicionadores lineales.
- H02N2/12 H02N 2/00 […] › Detalles de la estructura.
PDF original: ES-2399915_T3.pdf
Fragmento de la descripción:
Motor ultrasónico poliédrico accionado por rosca Campo de la invención La presente invención se refiere al campo de la aplicación ultrasónica y, más particularmente, a un diseño de configuración para un sistema de accionamiento por rosca de tornillo de un motor ultrasónico conformado en forma de tubo poliédrico.
Antecedentes de la invención Un motor ultrasónico piezoeléctrico es un mecanismo de accionamiento que utiliza el efecto piezoeléctrico inverso de los materiales piezoeléctricos y que está realizado con una configuración específica y comprende generalmente componentes funcionales tales como cerámicos piezoeléctricos, estatores, rotores, mecanismo de presión primaria y mecanismo de transmisión. Utiliza el efecto piezoeléctrico inverso del cerámico piezoeléctrico para generar una vibración ultrasónica en las superficies de los estatores y accionar los rotores mediante la fuerza de fricción entre los estatores y los rotores. El motor ultrasónico presenta las siguientes ventajas sobre los motores electromagnéticos ordinarios:
1. Velocidad de rotación baja, par de torsión elevado y la carga puede accionarse directamente sin mecanismos de deceleración.
2. Volumen pequeño, configuración flexible y más particularmente la relación potencia/volumen es 3-10 veces la de los motores electromagnéticos.
3. Respuesta rápida de arranque y frenado y más particularmente el tiempo de respuesta es inferior a 1 ms.
4. Ni provoca interferencia electromagnética ni está interferido por perturbación electromagnética.
5. Tiene un par de torsión de autorretención, sin espacio en el engranaje y puede usarse para un posicionamiento preciso.
6. Funcionamiento silencioso, sin ruidos.
La Fig.1 y la Fig. 2 muestran un motor ultrasónico piezoeléctrico de la técnica anterior.
La Fig.1 es un diagrama esquemático de la configuración de un motor ultrasónico en forma de tubo poliédrico, en la que la Fig. 1 (1) muestra la configuración de su parte principal, que incluye un vibrador que comprende un estátor 13 y elementos de electrostricción (placas cerámicas piezoeléctricas) 11, 12 adheridos a las superficies del estátor 13. Pueden ser electrodos múltiples divididos de un tubo piezoeléctrico o también pueden formarse mediante la adhesión de placas piezoeléctricas múltiples a la superficie externa del tubo piezoeléctrico (el tubo poliédrico está fabricado de materiales metálicos o superficies que están en contacto con las placas piezoeléctricas que son capas conductoras eléctricas y metálicas) . La superficie interna del vibrador es un toro liso. El rotor usa un tubo de un anillo 15 con una abertura 14. El rotor está instalado en la superficie interna del vibrador, trabajando bajo el principio de accionamiento de motores ultrasónicos de onda progresiva cuando se añade una tensión de accionamiento correspondiente en las placas cerámicas piezoeléctricas, la onda progresiva generada en la superficie interna del vibrador puede girar con respecto al anillo 15. La abertura en el anillo 15 se ajusta con el fin de aumentar la presión primaria en la superficie de contacto entre el estátor y el rotor.
El motor está destinado a aplicarse a un sistema de zoom de lente. La Fig. 1 (2) muestra la configuración de un sistema de transmisión por rosca de tornillo de dicha aplicación, donde las roscas de tornillo están talladas en el extremo frontal de un tubo de extracción 15 (correspondiente a dicho rotor) , que es inamovible en el aparato. El signo de referencia 13 se refiere a un anillo conformado en forma de tubo poliédrico cuya superficie externa está adherida con placas cerámicas piezoeléctricas 11, 12 (correspondiente a dicho vibrador) . Un soporte frontal 16 está adherido al extremo frontal del tubo poliédrico 13 para que esté integrado con las placas cerámicas piezoeléctricas 11, 12. El extremo frontal del soporte frontal 16 está tallado con roscas de tornillo que están acopladas con aquellas en el extremo frontal del tubo de extracción 15. El grupo de lentes de zoom está instalado en el soporte frontal 16 mediante un anillo de fijación y se forman roscas de tornillo en el extremo trasero del soporte que está acoplado con las roscas de tornillo en el extremo izquierdo del tubo de extracción 15. El vibrador está adherido al extremo del soporte frontal y la superficie interna del vibrador está en contacto con la superficie externa del tubo de extracción 15. Cuando el cerámico piezoeléctrico se excita por una señal eléctrica, las placas piezoeléctricas 11, 12 y el poliedro 13 se accionan para girar con respecto al tubo de extracción 15 y el soporte frontal 16 también se hace girar. De este modo, se genera un accionamiento toroidal en la superficie externa del tubo de extracción. El extremo izquierdo del tubo de extracción está tallado con roscas de tornillo de forma que el soporte frontal puede moverse de forma lineal a lo largo de la dirección axial como resultado de la rotación relativa de las roscas de tornillo entre el soporte frontal y el extremo frontal del tubo de extracción. El zoom y el enfoque pueden realizarse mediante el movimiento rectilíneo, así que el sistema anterior se denomina sistema de transmisión por rosca de tornillo. La señal de excitación piezoeléctrica se introduce dentro del sistema mediante una conexión de conmutación.
La Fig. 2 (1) es un diagrama esquemático de la configuración de un motor ultrasónico con una salida axial cónica de un tubo poliédrico, en el que la superficie interna de un estátor 21 tiene dientes cónicos 22 y se forma un vibrador mediante la adhesión de placas cerámicas piezoeléctricas 23 a las superficies externas del estátor 21, usándose el cuerpo cónico que está en contacto con los dientes cónicos 22 como rotor 24. La Fig. 2 (2) es un dibujo de montaje de la configuración que se aplica a una junta robótica donde el vibrador está cubierto por una carcasa de motor 27, una cubierta frontal 25 y una cubierta trasera 26 están dispuestas mediante un amortiguador 29 en ambos extremos y tanto la cubierta frontal como la trasera están conectadas con la carcasa del motor 27 como un conjunto mediante pernos de fijación 28. Dicha configuración transfiere directamente la vibración del vibrador al rotor.
El inconveniente de la configuración anterior es que la rotación se transforma en el movimiento rectilíneo mediante otro mecanismo de transmisión (transmisión por rosca de tornillo o transmisión por tornillo) en la práctica actual.
El documento WO 2005/027190 A2 desvela un aparato para accionar un montaje de árbol roscado mediante la flexión de una carcasa dentro de los planos paralelos al eje del árbol. Debido a este movimiento de flexión no hay superficie de contacto entre el árbol y la carcasa, sino solo un punto de contacto.
Sumario de la invención El fin de la presente invención es proporcionar un sistema de accionamiento por roscas de tornillo de un motor ultrasónico conformado en forma de tubo poliédrico que solucione los inconvenientes de la técnica anterior de forma que pueda tener una configuración sencilla. El movimiento relativo entre un estátor y un rotor puede generarse directamente mediante el contacto de roscas de tornillo y la rotación puede transformarse en el movimiento rectilíneo sin otro mecanismo de transmisión que puede hacer la configuración de aplicación más sencilla y compacta y que sea más adecuado para la miniaturización. Además tiene una perspectiva prometedora en amplios campos como el del micromecanizado y el de enfoque y zoom ópticos.
El motor ultrasónico poliédrico de accionamiento por roscas de tornillo proporcionado por la presente invención comprende un estátor, un rotor y múltiples placas cerámicas piezoeléctricas adheridas al estátor o al rotor como conjunto, caracterizado por que dicho estátor tiene roscas de tornillo en la superficie en contacto con el rotor y dicho rotor tiene también roscas de tornillo coincidentes con las del estátor.
Dicho estátor puede mantenerse por uno o por ambos extremos. Las roscas de tornillo externas o las roscas de tornillo internas del estátor y del rotor correspondiente pueden formarse en el conjunto o en una parte del tubo (parte superior, media o inferior) .
Dichas placas cerámicas piezoeléctricas pueden estar adheridas al estátor o al rotor para formar el vibrador, las superficies de adhesión entre las placas cerámicas piezoeléctricas y el estátor o el rotor son poliédricas.
Dicho estátor puede configurarse alrededor del rotor o estando rodeado por este.
El número de dichas placas cerámicas piezoeléctricas es un múltiplo de 3 o 4; o 1, 2, 3 o cualquier otro número entero que pueda generar ondas... [Seguir leyendo]
Reivindicaciones:
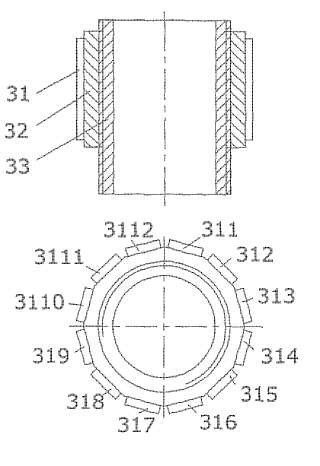
1. Un motor ultrasónico poliédrico de accionamiento por rosca de tornillo que comprende un estátor (33; 41; 51) y un rotor (32; 43; 53) , en el que el estátor o el rotor tiene forma de poliedro y los elementos piezoeléctricos (31; 42; 52) están adheridos al poliedro, caracterizado por que las ondas progresivas de flexión dentro del plano o las ondas estacionarias alrededor del círculo del poliedro pueden excitarse en el estátor (33; 41; 51) o en el rotor (32; 43; 53) y se proporcionan roscas de tornillo coincidentes entre sí en la superficie de contacto entre el estátor (33; 41; 51) y el rotor (32; 43; 53) .
2. El motor ultrasónico poliédrico de accionamiento por rosca de tornillo de acuerdo con la reivindicación 1, caracterizado por que dicho rotor (32) comprende elementos piezoeléctricos (31) que están adheridos a las superficies del poliedro, dicho rotor (32) tiene roscas de tornillo internas en las superficies internas del mismo, y las ondas progresivas de flexión dentro del plano a lo largo del poliedro pueden excitarse en dicho rotor (32) ; y el correspondiente estátor (33) está situado dentro de dicho rotor (32) con roscas de tornillo internas, el estátor (33) tiene roscas de tornillo externas en la superficie externa del mismo que son coincidentes con las roscas de tornillo internas del rotor (32) .
3. El motor ultrasónico poliédrico de accionamiento por rosca de tornillo de acuerdo con la reivindicación 1, caracterizado por que dicho estátor (41) es un tubo con una convexidad externa en parte de las superficies externas, la convexidad externa tiene roscas de tornillo externas en las superficies externas, la otra parte de las superficies externas del estátor (41) es poliédrica, el estátor (41) del motor ultrasónico está formado mediante la adhesión de dichos elementos piezoeléctricos (42) a las superficies del estátor poliédrico (41) , las ondas progresivas de flexión dentro del plano a lo largo del poliedro pueden excitarse en el estátor (41) , dicho rotor (43) es un tubo con roscas de tornillo internas que está instalado fuera de dicha convexidad del estátor (41) , las roscas de tornillo internas del rotor (43) son coincidentes con las roscas de tornillo externas de la convexidad del estátor (41) ; un tubo interno (44) está situado dentro del estátor (41) y las partes inferiores del tubo interno (44) y del estátor (41) están soportadas de forma inamovible entre sí.
4. El motor ultrasónico poliédrico de accionamiento por rosca de tornillo de acuerdo con la reivindicación 1, caracterizado por que dicho estátor (51) es un tubo con una convexidad interna en parte de las superficies internas, la convexidad interna tiene roscas de tornillo internas en sus superficies internas, el estátor (51) está formado mediante la adhesión de dichos elementos piezoeléctricos (52) a las superficies del poliedro, dicho rotor
(53) es un tubo con roscas de tornillo externas que está situado dentro del estátor (51) , las roscas de tornillo externas del rotor (53) son coincidentes con las roscas de tornillo internas de la convexidad del estátor (51) .
5. El motor ultrasónico poliédrico de accionamiento por rosca de tornillo de acuerdo con la reivindicación 1, caracterizado por que dicho estátor (63) está formado mediante la adhesión de elementos piezoeléctricos (62) a las superficies del poliedro, dicho estátor (63) tiene roscas de tornillo internas en sus superficies internas, las ondas progresivas de flexión dentro del plano pueden excitarse en dicho estátor (63) ; y el correspondiente rotor (61) está situado dentro de dicho estátor (63) con roscas de tornillo internas, el rotor (61) tiene roscas de tornillo externas en sus superficies externas que son coincidentes con las roscas de tornillo del estátor (63) .
6. El motor ultrasónico poliédrico de accionamiento por rosca de tornillo de acuerdo con la reivindicación 1, 2, 3, 4 o 5 caracterizado por que las secciones transversales de las roscas de tornillo están formadas en forma de triángulo, trapezoide, rectángulo o sus combinaciones, las roscas de tornillo pueden ser una curva continua o intermitente, o una curva que tiene un lugar geométrico particular; y las superficies de las roscas de tornillo se tratan para ser resistentes a la abrasión o están revestidas con materiales resistentes a la abrasión.
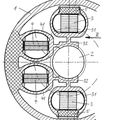
7. El motor ultrasónico poliédrico de accionamiento por rosca de tornillo de acuerdo con la reivindicación 1, 2, 3, 4 o 5 caracterizado por que dichos rotores (103; 105; 113; 115; 123; 125) tienen una configuración de rotor múltiple o doble, una presión primaria se proporciona mediante resortes (104) , tiras elásticas conformadas en forma de U (114)
o elementos magnéticos (1212) para presionar las roscas de tornillo del estátor (101; 111; 121) y los rotores (103; 105; 113; 115; 123; 125) firmemente entre sí; y el rotor es macizo o hueco.
8. El motor ultrasónico poliédrico de accionamiento por rosca de tornillo de acuerdo con la reivindicación 1, 2, 3, 4 o 5 caracterizado por que dicho rotor (103; 105; 113; 115; 123; 125) tiene una configuración de rotor múltiple o doble, dicho estátor (82; 86; 91; 96) tiene configuración de estátor múltiple o doble, una presión primaria se proporciona mediante el escalonamiento de los estatores múltiples o dobles o de los rotores múltiples o dobles mediante un pequeño ángulo y se adhieren entre sí coaxialmente para pre-tensar el par de roscas de tornillo de los estatores (82; 86; 91; 96) y de los rotores (103; 105; 113; 115; 123; 125) .
9. El motor ultrasónico poliédrico accionado por rosca de tornillo de acuerdo con la reivindicación 1, 2, 3, 4 o 5 caracterizado por que el número de dichos elementos piezoeléctricos es un número entero, que puede excitar ondas progresivas de flexión dentro del plano u ondas estacionarias, dichos elementos piezoeléctricos están
formados en forma de una placa o de un tubo.
10. El motor ultrasónico poliédrico accionado por rosca de tornillo de acuerdo con la reivindicación 9, caracterizado por que el número de dichos elementos piezoeléctricos es un múltiplo de 3 y/o 4.
11. El motor ultrasónico poliédrico accionado por rosca de tornillo de acuerdo con la reivindicación 1, 2, 3, 4 o 5
caracterizado por que dicho estátor (63; 73; 82; 86; 91; 96) tiene una configuración de estátor único, doble o múltiple, una presión primaria se proporciona mediante resortes (68; 712; 83) , una tira elástica conformada en forma de U (94) o elementos magnéticos para presionar las roscas de tornillo de los estatores (63; 73; 82; 86; 91; 96) y del rotor (61; 71; 810; 93) firmemente entre sí.
12. El motor ultrasónico poliédrico accionado por rosca de tornillo de acuerdo con la reivindicación 11, caracterizado por que un extremo del estátor (63; 73; 86; 91; 111; 121) que se elige de dichos estatores únicos, dobles o múltiples se fija en una base (64; 79; 89; 98; 117; 127) mediante una tira de aislamiento de vibración (65; 75; 88; 97; 116; 126) que tiene una pared fina o que está directamente fijada en una base (64; 79; 89; 98; 117; 127) .
Patentes similares o relacionadas:
MOTOR PIEZOELECTRICO CON ONDA PROGRESIVA., del 16 de Febrero de 2001, de FIGEST B.V.: MOTOR PIEZOELECTRICO CON ONDA PROGRESIVA QUE COMPRENDE AL MENOS UN ESTATOR CONSTITUIDO POR UN CUERPO ANULAR AL QUE ESTAN ASOCIADOS DOS GRUPOS DE ELEMENTOS PIEZOELECTRICOS […]
 ACCIONAMIENTO PIEZOELECTRICO Y SU USO COMO ACCIONAMIENTO PARA CARGAS PESADAS, del 16 de Octubre de 2007, de RICHTER, HANS: Accionamiento piezoeléctrico compuesto de una pluralidad de paquetes de piezos de apriete dispuestos unos juntos a otros, cada uno de […]
ACCIONAMIENTO PIEZOELECTRICO Y SU USO COMO ACCIONAMIENTO PARA CARGAS PESADAS, del 16 de Octubre de 2007, de RICHTER, HANS: Accionamiento piezoeléctrico compuesto de una pluralidad de paquetes de piezos de apriete dispuestos unos juntos a otros, cada uno de […]
Dispositivos de cuidado bucal con motores de electro-polímero lineales, del 23 de Agosto de 2017, de BRAUN GMBH: Un dispositivo de cuidado bucal, que tiene un motor de electro-polímero lineal que comprende: un elemento fijo ; […]
Accionador de precisión de ida y vuelta, del 23 de Agosto de 2017, de THALES: Accionador que comprende: - una base - una estructura intermedia , - una interfaz de salida , - dos elementos lineales […]
Actuador, del 31 de Mayo de 2017, de ROBERT BOSCH GMBH: Actuador , que comprende una carcasa , una bobina , un inducido que coopera con un taqué y un resorte , donde la placa del inducido […]
PROPULSOR INERCIAL MAGNÉTICO PARA ESPACIO PROFUNDO CON MASA DE DENSIDAD DE ENERGÍA VARIABLE QUE SE CONCENTRA Y SE DISPERSA, del 5 de Enero de 2017, de MORALES SOLÓRZANO, Guillermo Alberto: Dispositivo perfeccionado de propulsión inercial que aumenta la potencia de la tracción producida así como la continuidad de la fuerza y elimina el cabeceo. Este mecanismo […]
 Traductores de polímeros electroactivos, del 1 de Febrero de 2013, de SRI INTERNATIONAL: Un transductor para la conversión de energía eléctrica en energía mecánica, comprendiendo el transductor:por lo menos dos electrodos;
un polímero […]
Traductores de polímeros electroactivos, del 1 de Febrero de 2013, de SRI INTERNATIONAL: Un transductor para la conversión de energía eléctrica en energía mecánica, comprendiendo el transductor:por lo menos dos electrodos;
un polímero […]