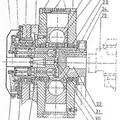
Motor de émbolo alternativo con compensación de masas mejorada.
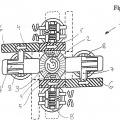
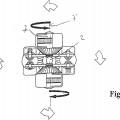
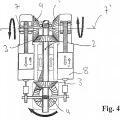
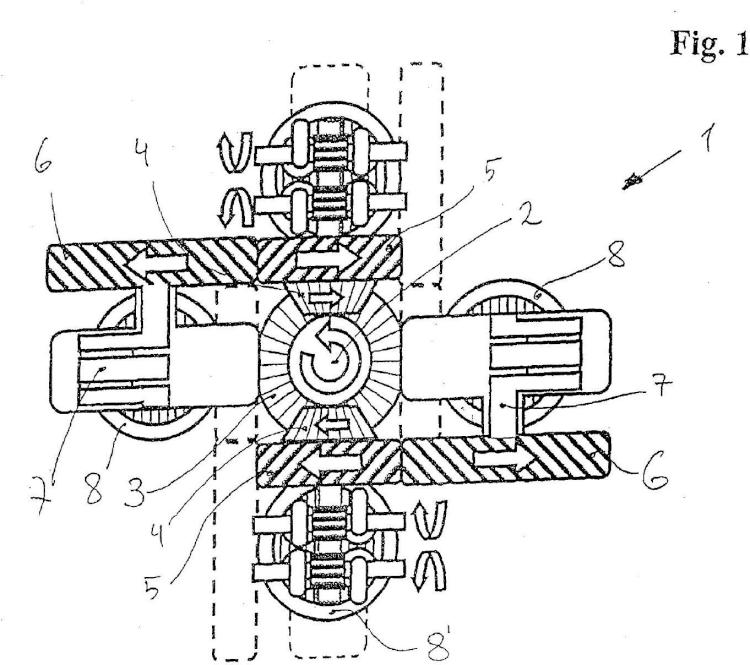
Motor de émbolo alternativo (1) con cuatro cilindros (8, 8') con sección transversal en forma de círculo con ejes de cilindro paralelos entre sí y un árbol de salida (2),
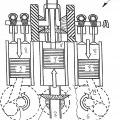
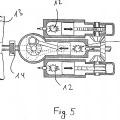
estando los ejes de los cilindros, vistos en sección axial, en los puntos de las esquinas de un rectángulo, preferiblemente de un cuadrado, en cuyo centro se encuentra el eje del árbol de salida (2) que se extiende en paralelo con respecto a los ejes de los cilindros y produciéndose la transmisión de fuerza o de momento a través de una manivela (7, 7') rotativa y un engranaje (3, 4, 5, 6) al árbol de salida (2), caracterizado por que respectivamente dos cilindros (8; 8') opuestos entre sí diagonalmente, visto axialmente, visto en el mismo sentido y axialmente, están dispuestos en sentido contrario a los dos otros cilindros (8'; 8), y que la transmisión de fuerza o de momento de cada cilindro (8, 8') se produce a través de una manivela (7, 7') rotativa propia.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AT2011/000170.
Solicitante: König, Harald.
Inventor/es: KONIG, HARALD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F01B3/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F01 MAQUINAS O MOTORES EN GENERAL; PLANTAS MOTRICES EN GENERAL; MAQUINAS DE VAPOR. › F01B MAQUINAS O MOTORES, EN GENERAL O DEL TIPO DE DESPLAZAMIENTO POSITIVO, p. ej. MAQUINAS DE VAPOR (del tipo con pistón rotativo u oscilante F01C; de desplazamiento no positivo F01D; motores de combustión F02; aspectos de la combustión interna de los motores con pistones alternativos F02B 57/00, F02B 59/00; máquinas de líquidos F03, F04; cigüeñales, cabezas de biela, bielas F16C; volantes F16F; órganos de transmisión para convertir un movimiento de rotación en movimiento alternativo, en general F16H; pistones, bulones de pistón, cilindros, para motores en general F16J). › Máquinas o motores de pistón alternativo con los ejes de los cilindros coaxiales, paralelos o inclinados con respecto al eje del árbol principal.
- F02B75/26 F […] › F02 MOTORES DE COMBUSTION; PLANTAS MOTRICES DE GASES CALIENTES O DE PRODUCTOS DE COMBUSTION. › F02B MOTORES DE COMBUSTION INTERNA DE PISTONES; MOTORES DE COMBUSTION EN GENERAL (plantas de turbinas de gas F02C; plantas de motores de desplazamiento positivo de gas caliente o de productos de combustión F02G). › F02B 75/00 Otros motores, p. ej. motores de un solo cilindro. › Motores con ejes de los cilindros coaxiales con el del árbol principal, paralelos o inclinados con relación a él; Motores con ejes de los cilindros dispuestos según la tangente a una circunferencia cuyo centro está situado sobre el eje del árbol principal.
PDF original: ES-2553386_T3.pdf
Patentes similares o relacionadas:
COMPRESOR-RECIRCULADOR DE FLUIDOS, del 27 de Junio de 2019, de ACTIVE FINANCIAL, S.A. DE C.V: Esta invención se refiere a un novedoso compresor-recirculador de fluidos de alta capacidad de compresión y flujo de salida, que permite tener volúmenes diferenciados […]
Motor de cilindro y pistón rotativo, del 12 de Junio de 2019, de Evirgen, Bülent Pulat: Motor de combustión interna de cuatro tiempos de pistón rotativo con una relación de compresión ajustable y unos tiempos de control de válvula […]
 Motor de pistones axiales y procedimiento para accionar un motor de pistones axiales, del 13 de Marzo de 2019, de GETAS Gesellschaft für thermodynamische Antriebssysteme mbH: Motor de pistones axiales con combustión interna continuada con una cámara de combustión que trabaja de forma continuada , con al menos dos cilindros de […]
Motor de pistones axiales y procedimiento para accionar un motor de pistones axiales, del 13 de Marzo de 2019, de GETAS Gesellschaft für thermodynamische Antriebssysteme mbH: Motor de pistones axiales con combustión interna continuada con una cámara de combustión que trabaja de forma continuada , con al menos dos cilindros de […]
Motor de pistones axiales y método para hacer funcionar un motor de pistones axiales, del 9 de Enero de 2019, de GETAS Gesellschaft für thermodynamische Antriebssysteme mbH: Motor de pistones axiales con una cámara de combustión , que trabaja con una combustión de dos etapas, una tobera principal y una […]
Motor de émbolos axiales, del 14 de Diciembre de 2016, de GETAS Gesellschaft für thermodynamische Antriebssysteme mbH: Motor de émbolos axiales con al menos un cilindro de compresor, con al menos un cilindro de trabajo y con al menos una línea de presión, […]
Motor de cilindros y bielas en radio de palanca, con engranajes-cono, del 7 de Enero de 2016, de PORRAS VILA,F. JAVIER: El motor de cilindros y bielas en radio de palanca, con engranajes-cono, es un sistema que genera movimiento mecánico con las explosiones […]
 MOTOR TÉRMICO DE PISTONES ROTATIVO, del 18 de Febrero de 2014, de RUIZ MARTINEZ, FRANCISCO JAVIER: Motor térmico rotativo de pistones.
Mecanismo basado en una palanca anclada en la periferia de un cárterformado por dos carcasas acopladas […]
MOTOR TÉRMICO DE PISTONES ROTATIVO, del 18 de Febrero de 2014, de RUIZ MARTINEZ, FRANCISCO JAVIER: Motor térmico rotativo de pistones.
Mecanismo basado en una palanca anclada en la periferia de un cárterformado por dos carcasas acopladas […]
 MOTOR ENDOTERMICO ROTATIVO CON APORTE DE AGUA RECALENTADA POR EL MISMO, del 16 de Junio de 2008, de JOPEVI, S.L.: Se describe un motor endotérmico rotativo, alimentado por un hidrocarburo líquido o gaseoso, con aportación de agua recalentada por el mismo y […]
MOTOR ENDOTERMICO ROTATIVO CON APORTE DE AGUA RECALENTADA POR EL MISMO, del 16 de Junio de 2008, de JOPEVI, S.L.: Se describe un motor endotérmico rotativo, alimentado por un hidrocarburo líquido o gaseoso, con aportación de agua recalentada por el mismo y […]