METODO DE GENERACION DE PROBLEMAS DE CONTROL OPTIMO PARA PROCESOS INDUSTRIALES.
Un método para diseñar un controlador o planificador basado en un modelo para la planificación o el control en tiempo real de un proceso industrial,
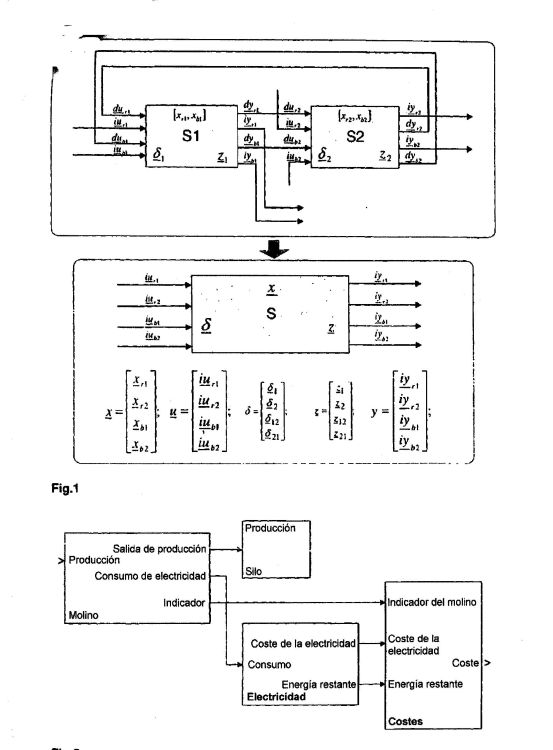
por el que el planificador o controlador se basa en un sistema (S) de Mixed Logical Dynamic (MLD) (Dinámica Lógica Mixta) que representa un proceso industrial y se obtiene por fusión de dos subsistemas (S1, S2) de Mixed Logical Dynamic (MLD) arbitrariamente interconectados, en donde - cada subsistema MLD (S1, S2) representa un subproceso del proceso industrial, - los subsistemas MLD (S1, S2) y el sistema MLD combinado (S) implican cada uno vectores de estado (x1, x2, x), vectores de entradas (u 1, u 2, u), vectores de salidas (y 1, y 2, y), variables auxiliares reales (z1, z2, z) y variables auxiliares booleanas (delta1, delta2, delta), que se describen por la ecuación de estado (ecuación 1a), una ecuación de salida (ecuación 1b) y restricciones (ecuación 1c), - los dos subsistemas (S1, S2) se interconectan a través de pares dependientes (dy1, du2; dy2, du1) formados por una salida dependiente (dy 1, dy 2) de un subsistema (S1, S2) y una entrada dependiente (du2, du1) del otro subsistema (S2, S1), y - entradas (iu1, iu2) y salidas (iy1, iy2) independientes de los subsistemas (S1, S2) que no son parte de los pares dependientes (dy1, du2; dy2, du1), caracterizado porque - el vector de estado (x) del sistema combinado (S) se compone de los correspondientes estados (x1; x2) de los subsistemas (S1, S2), - los vectores de entrada y salida (u, y), del sistema combinado (S) se componen de las correspondientes entradas (iu1, iu2) y salidas (iy1, iy2) independientes de los subsistemas (S1, S2), - las variables auxiliares (z, delta) del sistema combinado (S) comprenden las correspondientes variables auxiliares (z1, delta1; z2, delta2) de los subsistemas (S1, S2), - cada par dependiente (dy1, du2; dy2, du1) se sustituye por una variable real y/o booleana auxiliar adicional (z12, z21, delta12, delta21) del sistema combinado (S), - las ecuaciones de salida (ecuación 1b) para las salidas dependientes (dy1, dy2) de cada subsistema (S1, S2) se convierten en restricciones adicionales (ecuación 1d) del sistema combinado (S) implicando las variables reales y/o booleanas auxiliares adicionales (z12, z21, delta12, delta21).
Tipo: Resumen de patente/invención.
Solicitante: ABB RESEARCH LTD..
Nacionalidad solicitante: Suiza.
Dirección: AFFOLTERNASTRASSE 52,8050 ZURICH.
Inventor/es: GALLESTEY,EDUARDO ALVAREZ, CASTAGNOLI,DARIO, STOTHERT,ALEC.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Junio de 2004.
Fecha Concesión Europea: 12 de Marzo de 2008.
Clasificación PCT:
- G05B17/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 17/00 Sistemas que implican el uso de modelos o de simuladores de dichos sistemas (G05B 13/00, G05B 15/00, G05B 19/00 tienen prioridad; computadores analógicos para procedimientos, sistemas o dispositivos específicos, p. ej. simuladores, G06G 7/48). › eléctricos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Sistemas y métodos para la predicción rápida del agrietamiento inducido por hidrógeno (HIC) en tuberías, recipientes de presión y sistemas de tuberías, y para tomar medidas en relación con el mismo, del 13 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un metodo para llevar a cabo evaluaciones de idoneidad para el servicio para una region de un activo que tiene una tasa de crecimiento de dano inducido por hidrogeno, el […]
Método y sistema para proporcionar resultados de analítica de datos, del 8 de Enero de 2020, de SIEMENS AKTIENGESELLSCHAFT: Método para proporcionar resultados de analítica de datos para un procedimiento realizado en una planta industrial, comprendiendo dicho método: (a) proporcionar […]
Procedimiento combinado para detectar anomalías en un sistema de distribución de agua, del 8 de Enero de 2020, de SUEZ Groupe: Un procedimiento para detectar anomalías en un sistema de distribución de agua compuesto por una red de nodos, comprendiendo dicho […]
Desarrollo de un modelo superior para el control y/o monitorización de una instalación de compresor, del 25 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o monitorización de una instalación de compresor que comprende uno o varios compresores y uno o varios dispositivos periféricos […]
Desarrollo de un modelo superior, del 25 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o monitorización de una instalación de compresor que comprende uno o varios compresores y uno o varios dispositivos […]
Entrada de diagrama de tuberías e instrumentación para un proceso de control y/o supervisión de un sistema de compresor, del 6 de Noviembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o supervisión de una instalación de compresores que comprende uno o varios compresores y uno o varios […]
Procedimiento para la resolución de una tarea de control en una instalación de proceso, del 16 de Octubre de 2019, de Z & J Technologies GmbH: Procedimiento para la resolución de una tarea de control en una instalación de proceso, en particular para el paso de la instalación de proceso de un estado […]
Sistema de monitorización, del 12 de Junio de 2019, de BAE SYSTEMS PLC: Un método implementado por ordenador para diseñar un sistema de gestión de la salud para la monitorización del estado de una plataforma, […]