MÉTODO DE CONTROL DEL PATINAJE DE RUEDAS DE VEHÍCULOS DE TRACCIÓN ELÉCTRICA.
Método de control del patinaje de ruedas de vehículos de tracción eléctrica,
que actúa sobre el par de tracción de un motor eléctrico que transmite un movimiento de giro a un eje motriz al que van asociadas las ruedas del vehículo, en donde cuando se detecta el patinaje de la rueda se actúa sobre el par de tracción del motor eléctrico según dos fases consecutivas:
C. Reducción exponencial del par de tracción durante un tiempo de reducción (t_red) predefinido.
D. Recuperación lineal del par de tracción hasta alcanzar un par de tracción (T_ref) demandado o la detección de un nuevo deslizamiento.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001002.
Solicitante: TRAINELEC,S.L.
Nacionalidad solicitante: España.
Inventor/es: ECIOLAZA ECHEVERRIA,IBON, NIEVA FATELA,TXOMIN, ALBERDI UGARTE,Adur.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61C15/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61C LOCOMOTORAS; AUTOMOTORES (vehículos en general B60; chasis o bogies B61F; equipo especial de la vía férrea para las locomotoras B61J, B61K). › B61C 15/00 Mantenimiento o aumento de la fuerza de arranque o de frenado por dispositivos y medidas auxiliares; Medidas contra el patinaje de ruedas; Mando de la distribución del esfuerzo de tracción entre las ruedas motrices (propulsión de locomotoras y automotores por medios especiales B61C 11/00; ruedas motrices con dispositivos contra el patinaje B60B; frenos B61H; mojado o lubrificación de raíles B61K). › reduciendo la fuerza motriz.
Fragmento de la descripción:
Método de control del patinaje de ruedas de vehículos de tracción eléctrica.
Sector de la técnica
La presente invención está relacionada con los métodos y procedimientos empleados en vehículos de tracción eléctrica para evitar, o reducir, el patinaje o deslizamiento que se produce entre las ruedas de los vehículos y el carril de rodadura por el que se desplazan.
Estado de la técnica
Los sistemas de control de tracción eléctricos de vehículos ferroviarios se encargan de que los motores eléctricos de tracción bajo su control proporcionen un par de tracción, o un par de frenado, igual a un valor de par de referencia demandado por el conductor del vehículo ferroviario, o por el propio sistema de control. Así, cuando se demanda un determinado par de referencia, el sistema de control aumenta las revoluciones de los motores eléctricos de tracción para transmitir respectivos movimientos de giro a unos ejes motrices a los que van asociadas las ruedas del vehículo ferroviario.
Cuando el par de tracción que transmite el motor eléctrico al eje motriz del vehículo es superior al par resistente, es decir, cuando el par de referencia demandado supera la fricción existente entre la rueda y el carril, se produce un fenómeno de patinaje, o deslizamiento, de la rueda sobre el carril de rodadura por el que circula. Este fenómeno suele producirse en condiciones de baja adherencia, cuando el carril está sucio, mojado, o en malas condiciones, y principalmente en la puesta en marcha del vehículo ferroviario en condiciones de aceleración para alcanzar la velocidad de transito deseada.
Por deslizamiento debe entenderse la velocidad relativa entre la rueda y los carriles, es decir, la diferencia entre la velocidad lineal de la rueda y la velocidad del vehículo. La rueda tiende a sufrir un patinaje cuando se fracciona,
o tiende a bloquearse cuando se frena, esto produce vibraciones que disminuyen el confort de los usuarios del vehículo ferroviario y produce degradaciones del material que constituye las ruedas, pudiéndose producir defectos que provocan un mal funcionamiento de las ruedas, o incluso su destrucción, como pueden ser planos, grietas, coqueras, exfoliaciones, etc.
El máximo esfuerzo de tracción que se puede transmitir, es decir, el máximo par que puede transmitir el motor eléctrico de tracción al eje motriz depende de la adherencia existente entre la rueda y el carril. El esfuerzo de tracción a transmitir se puede mejorar aumentando la adherencia, una solución convencional para aumentar la adherencia consiste en lanzar arena sobre el carril, así, en la cabina del conductor se dispone una luz que avisa en el momento de producirse un patinaje o deslizamiento, de manera que en dicho momento el conductor deja caer arena sobre el carril para aumentar la adherencia.
Otra solución para mejorar la adherencia y optimizar el esfuerzo de tracción consiste en asociar cada motor eléctrico de tracción que dispone el vehículo ferroviario a un mayor número de ejes motrices, de manera que se disminuye el esfuerzo de tracción que se debe transmitir a cada eje motriz. Al disponerse un mayor número de ejes se aumenta el peso total del vehículo, con lo que se mejora la adherencia entre rueda y carril, no obstante, este aumento de peso implica un mayor consumo energético por parte de los motores eléctricos de tracción, además de resultar un montaje complejo y costoso.
Una solución convencional para actuar sobre el patinaje, o deslizamiento, de las ruedas del vehículo ferroviario se trata de que el conductor del vehículo reduzca manualmente la velocidad del mismo, sin embargo, está reducción no es lo suficientemente rápida ni precisa como para maximizar el esfuerzo de tracción que se transmite a los ejes motrices.
Para solventar este problema, son conocidos los sistemas de control de tracción eléctricos que actúan electrónicamente sobre el par de tracción maximizando el aprovechamiento del esfuerzo de tracción que se transmite a cada eje motriz del vehículo ferroviario. Estos sistemas de control se basan en una reducción, según una expresión lineal, del par de tracción transmitido por el motor eléctrico en el momento en que se detecta un patinaje o deslizamiento. Esta reducción lineal del par no es óptima, ya que puede producir vibraciones, lo que disminuye la estabilidad del vehículo, la dirigibilidad y el confort de los usuarios del vehículo ferroviario.
Se hace por tanto necesario disponer un método para controlar el patinaje de vehículos ferroviarios que actúe inmediatamente sobre el deslizamiento de la rueda atenuándolo gradualmente, disminuyendo las vibraciones y aumentando el confort de los usuarios del vehículo ferroviario.
Objeto de la invención
De acuerdo con la presente invención se propone un método de control del patinaje de las ruedas de vehículos de tracción eléctrica, principalmente vehículos de tracción ferroviaria, como trenes, tranvías o metros, el cual se basa en actuar sobre el par de tracción del motor eléctrico controlando sus revoluciones, de modo que cuando se detecta un deslizamiento de la rueda sobre el carril se actúe sobre el par de tracción mediante una reducción según una expresión exponencial.
Así, cuando se detecta un deslizamiento, o patinaje, de la rueda sobre el carril de rodadura por el que circula, se actúa electrónicamente sobre el par de tracción del motor eléctrico según dos fases consecutivas:
A. Reducción exponencial del par de tracción durante un tiempo de reducción predefinido.
B. Recuperación lineal del par de tracción hasta alcanzar el par de tracción demandado o la detección de un nuevo deslizamiento.
El método objeto de la invención permite aplicar un esfuerzo de tracción o frenado máximo respecto a las condiciones de adherencia de la vía por donde circula el vehículo.
Asimismo, minimiza los deslizamientos de las ruedas actuando de manera inmediata sobre ellos, con lo que se consigue disminuir el valor de los picos de deslizamiento y evitar un deslizamiento prolongado en el tiempo. Así, se evitan planos y desgastes excesivos en el material que constituye las ruedas.
Por otro lado se minimizan vibraciones a nivel de caja del vehículo, es decir los vagones donde viajan los usuarios. La reducción del par de tracción de forma exponencial evita que las variaciones del par sean demasiado fuertes, disminuyendo el estrés del sistema mecánico y mejorando el confort al nivel de caja. Del mismo modo se consigue una mayor estabilidad de control del vehículo en diferentes condiciones de funcionamiento, como son defectos de vía, curvas sinuosas, etc.
Se obtiene así un método de unas características muy ventajosas, adquiriendo vida propia y carácter preferente para la función de aplicación a la que está destinado en relación al control del patinaje de las ruedas de un vehículo ferroviario sobre los carriles de rodadura por donde circula.
Descripción de las figuras
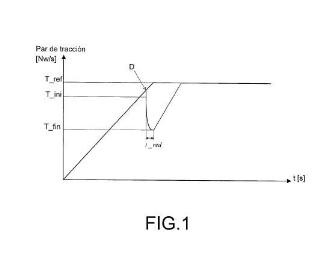
La figura 1 muestra una gráfica que relaciona la evolución del par de tracción de un motor eléctrico de tracción de un vehículo ferroviario a lo largo del tiempo.
Descripción detallada de la invención
Los vehículos ferroviarios suelen disponer de unas estructuras rodantes, denominada bogies, sobre las que descansan los vagones en los que viajan los usuarios del vehículo. Un bogie consta de una plataforma en donde se disponen unos ejes, los cuales presentan en sus extremos las correspondientes ruedas para transitar sobre unos carriles de circulación, en caso de tratarse de un bogie tractor, estos ejes son unos ejes motrices los cuales van asociados a un motor eléctrico de tracción que transmite un par de tracción a dichos ejes motrices. También puede darse el caso de que cada rueda del bogie disponga de un motor eléctrico de tracción independiente.
Según esta disposición, cuando se demanda un par de tracción a los motores eléctricos superior al máximo esfuerzo de tracción que se puede transmitir, es decir, cuando el par de tracción demandado (T_ref) supera la adherencia entre la rueda y el carril, se produce un patinaje o deslizamiento de la rueda. Para evitar este hecho, la invención propone un método de control del patinaje de ruedas de vehículos de tracción eléctrica basado en un control en tiempo real del par de tracción...
Reivindicaciones:
1. Método de control del patinaje de ruedas de vehículos de tracción eléctrica, que actúa sobre el par de tracción de un motor eléctrico que transmite un movimiento de giro a un eje motriz al que van asociadas las ruedas del vehículo, caracterizado porque cuando se detecta el patinaje de la rueda se actúa sobre el par de tracción del motor eléctrico según dos fases consecutivas:
A. Reducción exponencial del par de tracción durante un tiempo de reducción (t_red) predefinido.
B. Recuperación lineal del par de tracción hasta alcanzar un par de tracción (T_ref) demandado o la detección de un nuevo deslizamiento.
2. Método de control del patinaje de ruedas de vehículos de tracción eléctrica, de acuerdo con la primera reivindicación, caracterizado porque la reducción exponencial del par de tracción durante el tiempo de reducción (t_red) predefinido se calcula según:
en donde T_fin es el valor del par de tracción en la reducción exponencial, Jeq es la inercia equivalente que relaciona el par de tracción expresado en giro del motor eléctrico con la aceleración lineal de la rueda, amax es la aceleración angular del eje motriz y T_ini el valor inicial del par de tracción.
3. Método de control del patinaje de ruedas de vehículos de tracción eléctrica, de acuerdo con la primera y segunda reivindicaciones, caracterizado porque el valor inicial del par de tracción T_ini se calcula según:
en donde T_ref es el par de tracción demandado al motor de tracción, yCesuna constante comprendida en el intervalo [0.85-0.95].
4. Método de control del patinaje de ruedas de vehículos de tracción eléctrica, de acuerdo con la primera reivindicación, caracterizado porque la detección del patinaje de la rueda se produce si se cumple alguna de las siguientes condiciones:
• Si la aceleración angular del eje motriz que acciona las ruedas es superior a un valor umbral de aceleración lineal. Estando comprendido el valor umbral de aceleración lineal entre 2 m/s2 y 6 m/s2.
• Si la diferencia entre la velocidad lineal de la rueda y la velocidad lineal del tren es superior a un valor umbral de velocidad lineal. Estando comprendido el valor umbral de velocidad lineal entre 0.5 m/s y 2 m/s.
5. Método de control del patinaje de ruedas de vehículos de tracción eléctrica, de acuerdo con la primera reivindicación, caracterizado porque el tiempo de reducción t_red toma valores en el intervalo de tiempo comprendido entre
0.05s y 0.5s.
6. Método de control del patinaje de ruedas de vehículos de tracción eléctrica, de acuerdo con la primera reivindicación, caracterizado porque la recuperación lineal del par de tracción se produce según una pendiente de recta comprendida entre 100 Nm/s y 500 Nm/s.
Patentes similares o relacionadas:
Sistema de control de posición, del 10 de Enero de 2018, de Universal City Studios LLC: Un método para controlar un vehículo que tiene ruedas ubicado en un trayecto fijo, comprendiendo el vehículo un procesador de vehículo y un dispositivo […]
DISPOSITIVO DE CONTROL DE LA ADHERENCIA DE UN CONVOY FERROVIARIO ELECTRICO., del 1 de Julio de 2006, de ALSTOM: Dispositivo de control de la adherencia de una locomotora de un convoy ferroviario eléctrico, que comprende una etapa de regulación de la alimentación […]
UN SISTEMA DE CONTROL PARA VEHICULOS DE MOTOR ELECTRICO, del 16 de Febrero de 1987, de MITSUBISHI DENKI KABUSHIKI KAISHA: SISTEMA DE CONTROL DE VEHICULOS DE MOTOR ELECTRICO. SE COMPONE DE: UN CIRCUITO DE CONTROL (TMC) DEL TROCEADOR FORMADO POR UN PANTOGRAFO (PAN); UN CIRCUITO TROCEADOR […]
PROCEDIMIENTO Y DISPOSITIVO PARA LIMITAR EL DESLIZAMIENTO DE UN VEHICULO FERROVIARIO, del 1 de Octubre de 1985, de BBC AG. BROWN BOVERI & CIE.: PROCEDIMIENTO Y DISPOSITIVO PARA LIMITAR EL DESLIZAMIENTO DE UN VEHICULO FERROVIARIO.EL PROCEDIMIENTO SE CARACTERIZA PORQUE SE ELIMINA EN LAS RUEDAS […]