Mejoras en LIDARS.
Un aparato (10) de Detección y Alcance de la Luz (LIDAR), que comprende:
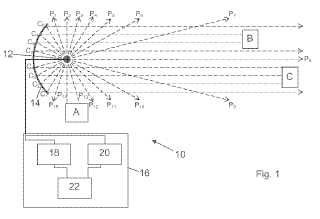
un medio de fuente de luz (12) apto para emitir un rayo de luz (C1 a C8 y P1 a P15) y dispuesto de tal maneraque el rayo de luz es giratorio a través de 360º alrededor de un centro de rotación, siendo emitido el rayo deluz en una pluralidad de intervalos angulares;
un espejo de parabólico (14) que tiene un punto focal, estando posicionado el espejo de parabólico de talmanera que el centro de rotación del rayo de luz está localizado sustancialmente en el punto focal y elespejo de parabólico cae dentro de un alcance angular inferior a 180º, y los rayos de luz sucesivos emitidos(C1 a C8), una vez reflejados desde el espejo parabólico (14), siguen una trayectoria sustancialmenteparalela;unos medios de recepción (12) para la recepción de luz reflejada desde una o más características en latrayectoria del rayo de luz; y
medios de análisis (16) para calcular una posición en la que una o más características están presentessobre la base del ángulo en el que el rayo de luz ha sido emitido y la demora de tiempo asociada con la luzreflejada recibida, en el que, cuando el rayo de luz es reflejado por el espejo parabólico, los medios deanálisis tienen en cuenta la reflexión del espejo parabólico y la posición de la o de cada característica escalculada utilizando un sistema de coordenadas cartesianas que tiene un punto de referencia en el puntofocal y en el que cuando el rayo de luz es emitido en un ángulo tal que el rayo de luz no es reflejado por elespejo parabólico, los medios de análisis son capaces de calcular una posición de la coordenada polar paracualquier característica que refleja luz desde el rayo de luz.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2009/050385.
Solicitante: BAE SYSTEMS PLC.
Nacionalidad solicitante: Reino Unido.
Dirección: 6 CARLTON GARDENS LONDON SW1Y 5AD REINO UNIDO.
Inventor/es: BRIMBLE,RICHARD ARTHUR, CLAXTON,CHRISTOPHER DAVID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar.
- G02B26/10 G […] › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 26/00 Dispositivos o sistemas ópticos que utilizan elementos ópticos móviles o deformables para controlar la intensidad, el color, la fase, la polarización o la dirección de la luz, p. ej. conmutación, apertura de puerta o modulación (elementos móviles de dispositivos de iluminación para el control de la luz F21V; dispositivos o sistemas especialmente adaptados para medir las características de la luz G01J; dispositivos o sistemas cuyo funcionamiento óptico se modifica por el cambio de las propiedades ópticas del medio que constituyen estos dispositivos o sistemas G02F 1/00; control de la luz en general G05D 25/00; control de las fuentes de luz H01S 3/10, H05B 39/00 - H05B 47/00). › Sistemas de barrido (para aplicaciones particulares, ver los lugares correspondientes, p. ej. G03B 27/32, G03F 3/08, G03G 15/04, G09G 3/00, H04N).
PDF original: ES-2446591_T3.pdf
Fragmento de la descripción:
Mejoras en LIDARS
La presente invención se refiere a un LIDAR (Detección y Alcance de la Luz) con resolución incrementada en al menos una dirección y particularmente, pero no exclusivamente, a un LADAR (Detección y Alcance de Láser) de coordenadas cartesianas para vehículos autónomos.
Los dispositivos de LIDAR, cuyos dispositivos de LADAR son un subconjunto, son una tecnología de detección remota óptica. En el caso de LADARs, se utilizan impulsos de láser para detectar el alcance hasta un objeto midiendo la demora de tiempo entre la transmisión de un impulso y la detección de la señal reflejada. Los dispositivos de LADAR han sido utilizados en muchas aplicaciones, incluyendo vehículos autónomos.
La mayoría de los dispositivos de LADAR funcionan haciendo girar un láser, o un espejo que desvía un haz de láser, a través de una rotación angular predeterminada. Puesto que se conoce el ángulo en el que se trasmite un impulso del haz de láser, el dispositivo de LADAR puede emitir un ángulo y una distancia con respecto a cualquier objeto detectado, dando la posición del objeto en el espacio de coordenadas esféricas. Típicamente, la posición se transforma entonces en el espacio de coordenadas cartesianas para uso con otros sistemas.
Una consecuencia del uso de este método es que la resolución de la detección de cualquier objeto se reduce cuanto más alejados se encuentran los objetos desde el punto de transmisión. Es decir, que cada impulso transmitido en un punto angular particular diverge de un impulso transmitido desde un punto angular anterior.
En aplicaciones de vehículos autónomos, se utilizan LADARs para la detección de objetos que pueden presentar un peligro de colisión o problema de navegación. Los LADARs con una resolución decreciente a medida que se incrementa la distancia dan como resultado limitaciones sobre la velocidad de avance de vehículos autónomos. Si un vehículo requiere avanzar a velocidades más rápidas, cualquier sistema de navegación debe tomar decisiones sobre rutas posibles en una fase temprana y, por lo tanto, requiere información sobre obstáculos en un tiempo temprano.
El documento EP0473866 describe un sistema de prevención de colisiones que es adecuado para aplicaciones de automoción, que incluye un escáner telemétrico electro-óptico, una unidad de procesamiento y retro-reflectores sobre vehículos objetivos.
El documento JP1161107 describe una disposición para medir una imagen tridimensional con alta exactitud y para permitir mediciones de tamaño irradiando un cuerpo tridimensional con luz láser de forma progresiva.
El documento US6022115 describe un sistema óptico para medición de un dispositivo tridimensional.
El documento DE2302645 describe el uso de láseres en equipo de análisis metrológico.
Mo Longbin y col. “Unbiased converted measurements for tracking” (IEEE transactions on Aerospace and Electronic Systems, vol. 34, nº 3, 1 de Julio de 1998, páginas 1023-1027, XP009100946 USSN: 0018-9251) describe cómo la compensación de la polarización en conversión polar clásica a cartesiana es multiplicativa y depende de la estadística del coseno de los errores de medición del ángulo. También se describe una conversión no polarizada.
El documento US7315503 describe un dispositivo de captación óptica que comprende al menos una lente de matriz de micro-espejos.
El documento US7154649 describe un dispositivo para la desviación de haces ópticos que tiene una matriz de elementos de espejos, y cada elemento de espejo es pivotable en cualquier ángulo independientemente de otro elemento de espejo.
El documento DE19949969 describe sensores de distancia de láser y radar.
El documento EP1286178 A2 describe un método de detección de tierra por un escáner opto-electrónico en un vehículo, que escanea en al menos dos planos.
Los métodos de la técnica anterior para mejora de la resolución incluyen típicamente incrementar el número de láseres que giran en el dispositivo, pero esto significa, sin embargo, que la resolución del sistema varía de acuerdo con la distancia desde el dispositivo.
De acuerdo con un primer aspecto de la presente invención, se proporciona un aparato de Detección y Alcance de la Luz (LIDAR) , que comprende:
un medio de fuente de luz apto para emitir un rayo de luz y dispuesto de tal manera que el rayo de luz es giratorio alrededor de un centro de rotación para detectar características a través de 360º, siendo emitido el
rayo de luz en una pluralidad de intervalos angulares;
un espejo de objeto parabólico que tiene un punto focal, estando posicionado el espejo de objeto de tal manera que el centro de rotación del rayo de luz está localizado sustancialmente en el punto focal y el espejo de objeto cae dentro de un alcance angular inferior a 180º, y los rayos de luz sucesivos emitidos, una vez reflejados desde el espejo de objeto, siguen una trayectoria sustancialmente paralela,
unos medios de recepción para la recepción de luz reflejada desde una o más características en la trayectoria del rayo de luz; y
medios de análisis para calcular una posición en la que una o más características están presentes sobre la base del ángulo en el que el rayo de luz ha sido emitido y la demora de tiempo asociada con la luz reflejada recibida, en el que, cuando el rayo de luz es reflejado por el espejo de objeto, los medios de análisis tienen en cuenta la reflexión del espejo de objeto y la posición de la o de cada característica es calculada utilizando un sistema de coordenadas cartesianas que tiene un punto de referencia en el punto focal y en el que cuando el rayo de luz es emitido en un ángulo tal que el rayo de luz no es reflejado por el espejo de objeto, los medios de análisis son capaces de calcular una posición de la coordenada polar para cualquier característica que refleja luz desde el rayo de luz.
Una característica puede ser cualquier superficie que produce una reflexión, tal como desde un objeto o superficie delante del LIDAR.
Con preferencia, los medios de análisis calculan un punto de intercepción, que es el punto en el rayo de luz es reflejado desde los medios de reflexión.
Con preferencia, los medios de fuente de luz y los medios de recepción están colocados en el punto focal.
De manera alternativa, los medios de fuente de luz están localizados en el punto focal y los medios de recepción están espaciados desde el punto focal.
Con preferencia, la fuente de luz es al menos un láser y el rayo de luz es un haz de láser.
Con preferencia, la fuente de luz es un láser individual y el rayo de luz es un haz de láser.
Con preferencia, el aparato comprende, además, un medio de refracción apto para refractar rayos de luz para reducir la divergencia desde los medios de fuente de luz.
Con preferencia, el aparato comprende, además, medios de movimiento de la dirección dispuestos para panoramizar o inclinar el aparato y permitir que rayos de luz reflejados desde los medios de reflexión sean dirigidos en una dirección particular.
1. De acuerdo con un segundo aspecto de la presente invención, se proporciona un método de funcionamiento de un LIDAR que tiene unos medios de fuente de luz, que comprende las etapas de:
(i) emitir un rayo de luz desde los medios de fuente de luz a intervalos regulares;
(ii) hacer girar el rayo de luz para detectar características a través de 360º alrededor de un centro de rotación en una pluralidad de intervalos angulares;
(iii) reflejar el rayo de luz desde un espejo de objeto parabólico que tiene un punto focal, estando posicionado el espejo de objeto de tal manera que el centro de rotación del rayo de luz está localizado sustancialmente en el punto focal y el espejo de objeto cae dentro de un alcance angular inferior a 180º, de manera que los rayos de luz reflejados desde el espejo de objeto están sustancialmente paralelos;
(iv) recibir luz reflejada desde una o más características en la trayectoria del rayo de luz:
calcular una posición, en la que una o más características están presentes sobre la base del ángulo en el que el rayo de luz ha sido emitido y la demora de tiempo asociada con la luz reflejada recibida, en el que, cuando el rayo de luz es reflejado por el espejo de objeto, los medios de análisis tienen en cuenta la reflexión del espejo de objeto y la posición de la o de cada característica es calculada utilizando un sistema de coordenadas cartesianas que tiene un punto de referencia en el punto focal y en el que cuando el rayo de luz es emitido en un ángulo tal que el rayo de luz no es reflejado por... [Seguir leyendo]
Reivindicaciones:
1. Un aparato (10) de Detección y Alcance de la Luz (LIDAR) , que comprende:
un medio de fuente de luz (12) apto para emitir un rayo de luz (C1 a C8 y P1 a P15) y dispuesto de tal manera que el rayo de luz es giratorio a través de 360º alrededor de un centro de rotación, siendo emitido el rayo de luz en una pluralidad de intervalos angulares;
un espejo de parabólico (14) que tiene un punto focal, estando posicionado el espejo de parabólico de tal manera que el centro de rotación del rayo de luz está localizado sustancialmente en el punto focal y el espejo de parabólico cae dentro de un alcance angular inferior a 180º, y los rayos de luz sucesivos emitidos (C1 a C8) , una vez reflejados desde el espejo parabólico (14) , siguen una trayectoria sustancialmente paralela;
unos medios de recepción (12) para la recepción de luz reflejada desde una o más características en la trayectoria del rayo de luz; y
medios de análisis (16) para calcular una posición en la que una o más características están presentes sobre la base del ángulo en el que el rayo de luz ha sido emitido y la demora de tiempo asociada con la luz reflejada recibida, en el que, cuando el rayo de luz es reflejado por el espejo parabólico, los medios de análisis tienen en cuenta la reflexión del espejo parabólico y la posición de la o de cada característica es calculada utilizando un sistema de coordenadas cartesianas que tiene un punto de referencia en el punto focal y en el que cuando el rayo de luz es emitido en un ángulo tal que el rayo de luz no es reflejado por el espejo parabólico, los medios de análisis son capaces de calcular una posición de la coordenada polar para cualquier característica que refleja luz desde el rayo de luz.
2. Un LIDAR de acuerdo con la reivindicación 1, en el que los medios de fuente de luz y los medios de recepción están colocados en el punto focal.
3. Un LIDAR de acuerdo con la reivindicación 1 ó 2, en el que los medios de análisis (16) calculan un punto de intercepción, que es el punto en el rayo de luz es reflejado desde el espejo parabólico (14) .
4. Un LIDAR de acuerdo con una cualquiera de las reivindicaciones 1 a 3, en el que la fuente de luz es al menos un láser y el rayo de luz es un haz de láser.
5. Un LIDAR de acuerdo con una cualquiera de las reivindicaciones 1 a 4, que comprende, además, un medio de refracción apto para refractar rayos de luz para reducir la divergencia desde los medios de fuente de luz.
6. Un LIDAR de acuerdo con una cualquiera de las reivindicaciones 1 a 5, que comprende, además, medios de movimiento de la dirección dispuestos para panoramizar o inclinar el aparato y permitir que rayos de luz reflejados desde el espejo parabólico sean dirigidos en una dirección particular.
7. Un LIDAR de acuerdo con una cualquiera de las reivindicaciones 1 a 6, en el que el espejo parabólico cae dentro de un alcance angular de sustancialmente 120º.
8. Un método de funcionamiento de un LIDAR que tiene unos medios de fuente de luz, que comprende las etapas de:
(i) emitir un rayo de luz desde los medios de fuente de luz a intervalos regulares;
(ii) hacer girar el rayo de luz a través de 360º alrededor de un centro de rotación en una pluralidad de intervalos angulares;
(iii) reflejar el rayo de luz desde un espejo parabólico que tiene un punto focal, estando posicionado el espejo parabólico de tal manera que el centro de rotación del rayo de luz está localizado sustancialmente en el punto focal y el espejo parabólico cae dentro de un alcance angular inferior a 180º, de manera que los rayos de luz reflejados desde el espejo parabólico están sustancialmente paralelos;
(iv) recibir luz reflejada desde una o más características en la trayectoria del rayo de luz:
(v) calcular una posición, en la que una o más características están presentes sobre la base del ángulo en el que el rayo de luz ha sido emitido y la demora de tiempo asociada con la luz reflejada recibida, en el que, cuando el rayo de luz es reflejado por el espejo parabólico, los medios de análisis tienen en cuenta la reflexión del espejo parabólico y la posición de la o de cada característica es calculada utilizando un sistema de coordenadas cartesianas que tiene un punto de referencia en el punto focal y en el que cuando el rayo de luz es emitido en un ángulo tal que el rayo de luz no es reflejado por el espejo parabólico, los medios de análisis son capaces de calcular una posición de la coordenada polar para cualquier característica que refleja luz desde el rayo de luz.
9. Un método de acuerdo con la reivindicación 8, en el que la etapa (v) calcula un punto de intercepción, que es el punto en el que el rayo de luz es reflejado desde el espejo parabólico.
10. Un vehículo autónomo que comprende un sistema de prevención de la colisión del vehículo que comprende un LIDAR de acuerdo con una cualquiera de las reivindicaciones 1 a 7.
11. Un vehículo autónomo que comprende un sistema de selección de terreno preferido, que comprende un LIDAR de acuerdo con una cualquiera de las reivindicaciones 1 a 7.
Patentes similares o relacionadas:
MÉTODO Y DISPOSITIVO DE DETECCIÓN DE PICO DEL HISTOGRAMA COMPRIMIDO DE LOS VALORES DE PÍXEL EN SENSORES DE TIEMPO DE VUELO DE ALTA RESOLUCIÓN, del 5 de Marzo de 2020, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Método y dispositivo de detección de pico del histograma comprimido de los valores de píxel en sensores de tiempo-de vuelo de alta resolución. Se […]
Procedimiento y sistema de detección de un tren de impulsos electromagnéticos, dispositivo de guiado electromagnético de una munición hacia un objetivo que comprende un tal sistema de detección, del 29 de Mayo de 2019, de THALES: Procedimiento de detección de un tren de impulsos electromagnéticos emitidos según una ley de incidencia predefinida en un escenario de observación por […]
Sistemas y procedimientos de alineación óptica de combustible en reactores nucleares, del 11 de Abril de 2018, de GE-HITACHI NUCLEAR ENERGY AMERICAS LLC: Un sistema para situar estructuras de manipulación con artículos para su manipulación en un entorno de reactor nuclear, comprendiendo […]
BALIZA, del 10 de Abril de 2018, de MATECSAPAK, S. L: 1. Baliza que comprende un cuerpo de base que alberga una placa de circuito impreso con leds de distintos colores y, al menos, una batería , y está tapado […]
Corrección de ganancia basada en una fuente de luz embarcada para buscadores de láser semi-activos, del 7 de Marzo de 2018, de BAE SYSTEMS INFORMATION AND ELECTRONIC SYSTEMS INTEGRATION, INC.: Un sistema de guiado de un vehículo que comprende: una fuente de luz de calibración a bordo del sistema de guiado de un vehículo, una pluralidad […]
DISPOSITIVO DE SEGURIDAD PARA LA DETECCION DE PERSONAS EN ZONAS DE CAMPOS DE GOLF SOBRE LAS QUE IMPACTAN BOLAS IMPULSADAS EN GOLPES CIEGOS., del 16 de Mayo de 2007, de NAVARRA GOLF CAPITAL, S.L.: Dispositivo de seguridad para la detección de personas en zonas de campos de golf sobre las que impactan bolas impulsadas en golpes ciegos que consiste […]
DISPOSITIVO DE DETECCION DEL PASO DE UNA LINEA DE MARCADO DE LA CALZADA PARA UN VEHICULO AUTOMOVIL., del 1 de Diciembre de 2006, de EM MICROELECTRONIC-MARIN SA: Dispositivo de detección del paso de un marcado horizontal de delimitación de las vías de circulación de una calzada para un vehículo automóvil caracterizado porque […]
Dispositivo con doble accionamiento para barrido secuencial y procedimiento asociado, del 1 de Enero de 2020, de THALES: Dispositivo con doble impulso para barrido secuencial que comprende: - una parte móvil que comprende un armazón […]