Un dispositivo mecánico para la plataforma Stewart.
Un dispositivo mecánico para la plataforma Stewart.
La invención permite a la plataforma Stewart realizar hasta trece ensayos mecánicos estándar aparte de su función original como simulador de movimientos.
Estos ensayos se clasifican en tres grupos según el tipo de espécimen: (1) bloques, (2) vigas o placas, y (3) barras. Para los bloques pueden realizarse los siguientes ensayos: tensión, compresión, cortante, torsión y fatiga. Para las vigas/placas pueden efectuarse ensayos de flexión simple, flexión doble, momento flector puro y fatiga. Para las barras pueden efectuarse los siguientes ensayos: tensión, compresión, torsión y fatiga. La invención ocupa únicamente el espacio interior de la plataforma Stewart, sin restringir ninguno de sus elementos móviles, y añade poco o ningún aumento a sus dimensiones externas. La base inferior fija de la plataforma Stewart soporta la mayor parte de la invención, lo que hace que ésta disminuya poco la capacidad vertical de la plataforma Stewart.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331348.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: RODELLAR BENEDÉ,José, ISMAIL ABDELKAREEM MOUSTAFA,Mohammed.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- G01N3/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Investigación de las propiedades mecánicas de los materiales sólidos por aplicación de una incitación mecánica.
Fragmento de la descripción:
Un dispositivo mecánico para la plataforma Stewart Sector de la técnica
La presente invención es una extensión mecánica para la plataforma Stewart, la cual es un tipo de robot paralelo que incorpora seis actuadores para simular tres desplazamientos y tres rotaciones según tres ejes de coordenadas cartesianas, respectivamente. Dicha extensión mecánica permite a la plataforma Stewart utilizar sus movimientos para realizar hasta un total de trece ensayos mecánicos que son de uso habitual. Dichos ensayos se clasifican en tres categorías basadas en las configuraciones del espécimen objeto de ensayo, a saber: especímenes de tipo bloque, especímenes de tipo viga o placa y especímenes de tipo barra.
Los especímenes tipo bloque pueden estudiarse mediante ensayos bajo tensión, compresión, fuerza cortante, torsión y desgaste, respectivamente. Los especímenes tipo viga o placa pueden estudiarse mediante ensayos bajo momento flector simple, momento flector doble, momento flector puro y fatiga, respectivamente. Los de tipo barra pueden ensayarse bajo tensión, compresión, torsión y fatiga. Todos estos ensayos son bastante comunes en diferentes aplicaciones, industrias e ingenierías, tales como caracterización de materiales, construcción, manufactura, automoción, ingeniería civil, mecánica, aeronáutica y muchos otros. Una ventaja adicional muy significativa de la presente invención es que ocupa únicamente el espacio interior disponible entre las dos plataformas superior e inferior de la plataforma Stewart, sin estar en contacto con ninguna de sus partes móviles en ningún momento dentro de sus rangos máximos de movimientos. Esto hace que las dimensiones externas de la plataforma Stewart apenas se ven aumentadas una vez se ha integrado la invención. Esta ventaja se complementa con otra igualmente importante, a saber, que la mayoría del peso de la invención se soporta sobre la base de la plataforma Stewart, la cual se apoya directamente en el suelo. La plataforma móvil superior de la plataforma Stewart soportará únicamente una pequeña parte del peso de la invención, lo que consume una parte pequeña de la capacidad de carga vertical de la propia plataforma Stewart.
Estado de la técnica anterior
Un ensayo mecánico es un proceso donde se aplican de forma controlada fuerzas, presiones, desplazamientos, calor, o estímulos similares a un sistema mecánico, midiéndose las respuestas producidas. El objetivo es caracterizar el comportamiento del sistema. Máquina de ensayo es el nombre genérico usado para una variedad de dispositivos que aplican una carga controlada a un espécimen. Las cargas pueden variar desde unos pocos gramos hasta miles de kilos y pueden ser de naturaleza estática (variando lentamente) o dinámica, con variaciones rápidas oscilando a altas frecuencias.
En general existen dos componentes principales en una máquina de ensayo: un mecanismo de carga y un sistema de medida. En el primero, la generación de la carga se hace de forma hidráulica o mecánica en la mayoría de máquinas, utilizándose técnicas electromagnéticas o térmicas en algunos casos especializados. Para medir la carga generada se usan, por ejemplo, células de carga. Para medir las respuestas producidas se usan diversos tipos de sensores.
Justo al final de la guerra de secesión, con el auge de la industrialización en Estados Unidos y de la construcción en diversas partes del mundo, creció la necesidad de disponer de mejores formas de ensayar los materiales usados en la maquinaria, los edificios, etc. Los ingenieros se quejaban de la falta de información fiable sobre las propiedades de los materiales. El arte de la construcción está inmerso en misterio y oscuridad, se escribía en el Van Nostrands Engineering Magazine, añadiendo que el conocimiento presente de los materiales es absolutamente empírico y que antes de que el constructor haga uso de un nuevo material o uno conocido pero de otra forma, el único método seguro es la experimentación.
A partir de 1850 se habían desarrollado algunos dispositivos para el ensayo de materiales, pero el objetivo de una verdadera máquina de ensayos universal no se alcanzó hasta 1880, cuando el ingeniero Tinius Olsen, de Filadelfia (USA), concibió y patentó la que se conoció como Little Giant. Esta fue una máquina para ensayos a tensión, transversales y a compresión, todos ellos en un único instrumento, que fue el precursor de todas las máquinas de ensayo producidas posteriormente en el mundo. La empresa que Olsen creó para comercializar su invento continúa aún hoy en día en el mercado de las máquinas de ensayo.
Otra compañía, Instron, se estableció en 1946 en Cantón, Massachusetts (USA), después de descubrir que no existía máquina de ensayo alguna con suficiente precisión para satisfacer sus requerimientos. Su nueva máquina incorporó un único sistema conductor similar al que se utilizaba para el posicionamiento de los radares en barcos de guerra. El transductor para la medida de la carga utilizó la galga extensiométrica, que por entonces era una nueva tecnología desarrollada en el MIT (USA).
En su artículo de 1965, Stewart describió un mecanismo dotado con seis grados de libertad controlados mediante seis motores, cada uno de los cuales teniendo un soporte en el suelo. Este mecanismo fue una configuración particular de un sistema con seis gatos lineales desarrollado originalmente por Eric Gough en 1947. Stewart lo propuso para ser utilizado como simulador de vuelo para el entrenamiento de pilotos de helicópteros. Objetos colocados en la placa superior pueden moverse en los seis grados de libertad en los que puede moverse un cuerpo suspendido libremente. Estos son los tres movimientos lineales (x-lateral, y-longitudinal, z-vertical) y las tres rotaciones. Este mecanismo es habitualmente conocido como plataforma Stewart o hexápodo (seis piernas) ya que el dispositivo tiene seis actuadores. Existen hoy en día diferentes variantes en cuanto a forma y características de los actuadores, pero los conceptos esenciales son los mismos ya que todos se basan en los mismos principios de operación.
La plataforma Stewart tiene una plataforma superior móvil que se mueve en 6 grados de libertad y una plataforma inferior fija sujeta a una base fija. Este diseño es ideal para concebir una máquina para ensayos múltiples incorporando un sistema mecánico complementario diseñado a propósito. La presente invención es el sistema necesario para conseguir que la plataforma Stewart pueda realizar hasta 13 ensayos mecánicos estándar sin afectar la funcionalidad original de la plataforma como simulador de movimientos. Esto significa que la integración de la presente invención con la plataforma Stewart convierte el simulador de movimientos en una máquina con 14 funciones. Según una revisión exhaustiva del estado de la técnica, la presente invención es la primera integración de su clase en la plataforma Stewart y no existen otras similares hasta ahora.
Explicación de la invención
La presente invención es un sistema mecánico diseñado para ser integrado en la plataforma Stewart para realizar hasta un total de trece nuevas operaciones que se suman a su función original como simulador de movimientos. Estas operaciones adicionales son trece ensayos mecánicos que se realizan frecuentemente en estudios de caracterización de materiales, construcción, manufactura, automoción, ingeniería civil, mecánica, aeronáutica y en muchos otros casos. Estos trece ensayos se clasifican en tres grupos según el tipo de espécimen a ensayar: (1) bloques, (2) vigas o placas, y (3) barras. Para los bloques pueden realizarse los siguientes ensayos: tensión, compresión, cortante, torsión y fatiga. Para las vigas/placas pueden efectuarse ensayos de flexión simple, flexión doble, momento flector puro y fatiga. Para las barras pueden llevarse a cabo los siguientes ensayos: tensión, compresión, torsión y fatiga.
El sistema de medida de deformaciones y cargas en los diferentes ensayos realizables podría consistir en cualquier dispositivo disponible en el mercado. En particular se considera aquí un sensor de fuerzas y momentos en 6 grados de libertad que existe en el mercado y que se ha utilizado en diversos ejemplos de realización.
Una ventaja adicional muy importante de la presente invención es que ocupa únicamente el espacio interior disponible entre las dos placas superior e inferior de la plataforma Stewart, sin estar en contacto con ninguna de sus partes móviles en ningún momento dentro de sus rangos máximos de movimientos. Esto hace que las dimensiones externas de la plataforma Stewart apenas se ven aumentadas una vez se ha integrado la invención. Esta ventaja se complementa con otra igualmente importante, a saber, que la mayoría...
Reivindicaciones:
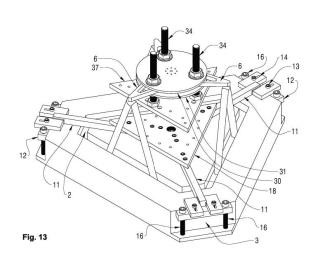
1. Un dispositivo mecánico acopladle en una plataforma tipo Stewart (Hexápodo) de las que presentan una plataforma superior móvil (B) y una plataforma inferior fija (A), caracterizado por el hecho que comprende:
a) Una placa superior (30) y una placa inferior (31) que forman un sándwich rígido con la plataforma superior móvil (B) del Hexápodo de modo que dicho sándwich es capaz de desplazarse y rotar solidariamente con dicha plataforma superior móvil (B).
b) Al menos dos ejes roscados (34) que pasan a través de dichas placas superior e inferior (30, 31) del sándwich y que están conectados rígidamente a las placas superior e inferior (30, 31) de modo que se transmiten exactamente sus desplazamientos y rotaciones.
c) Unos medios de fijación superiores que se conectan firmemente a dichos al menos dos ejes roscados de modo que se reciben exactamente en dichos medios de fijación superiores los movimientos y rotaciones de dichos ejes roscados.
d) Al menos tres elementos de soporte (11), los cuales están soportados directamente por dicha plataforma inferior fija (A) del Hexápodo.
e) Al menos tres limitadores (12) que están sujetos firmemente de forma correspondiente a los extremos exteriores de los al menos tres elementos de soporte (11), tal que se impide que dichos elementos de soporte (11) tengan cualquier movimiento horizontal plano o de rotación alrededor de cualquier eje vertical.
f) Al menos dos pares de tornillos roscados (16) para conectar los limitadores (12) a la plataforma inferior fija (A) del Hexápodo, tal que se impide que los elementos de soporte (11) tengan cualquier movimiento vertical o de rotación alrededor de cualquier eje horizontal.
g) Unos medios de fijación inferiores que están soportados directamente por dichos elementos de soporte (11) y están ajustados firmemente entre sí.
h) Unos medios de sujeción superiores para la parte superior de un espécimen a ensayar, estando vinculados dicho medios de sujeción superiores directa y firmemente a los medios de fijación superiores de modo que se adquiere exactamente el movimiento y/o rotación de los medios de fijación superiores.
i) Unos medios de sujeción inferiores para la parte inferior del espécimen a ensayar, estando sujeto dichos medios de sujeción inferiores directa y firmemente a los medios de fijación inferiores de modo que se adquiere exactamente el movimiento y/o rotación de los medios de fijación inferiores.
2. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de fijación superiores comprenden una placa triangular superior (37).
3. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 2, caracterizado por el hecho de que dicha placa triangular superior (37) presenta una pluralidad de orificios (38, 40, 41, 42, 43, 44).
4. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de fijación superiores comprenden una placa triangular inferior (18).
5. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 4, caracterizado por el hecho de que dicha placa triangular inferior (18) presenta una pluralidad de orificios (19, 20, 21, 22).
6. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción superiores comprenden una tapa (55) asociable a la parte superior de un espécimen tipo bloque a ensayar.
7. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción inferiores comprenden una
pluralidad de elementos de soporte (61) vinculados correspondientemente a una pluralidad de elementos adicionales de soporte (64), siendo dichos medios elementos de soporte (61) y dichos elementos adicionales de soporte (64) asociables a la parte inferior de un espécimen tipo bloque a ensayar.
8. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción superiores comprenden una parte de soporte superior (100), en el que dicha parte de soporte superior (100) presenta un rebaje (45, 46, 47, 48) encajable a la parte superior de un espécimen tipo bloque a ensayar.
9. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción inferiores comprenden una parte de soporte inferior (101), en el que dicha parte de soporte inferior (101) presenta un rebaje (45, 46, 47, 48) encajable a la parte inferior de un espécimen tipo bloque a ensayar.
10. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción superiores comprenden una pluralidad de ángulos (110).
11. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción superiores comprenden un soporte de espécimen superior (120) de forma anular provisto de al menos un tornillo de apriete (124) dispuesto radialmente respecto a dicho soporte de espécimen superior (120), en el que dicho tornillo de apriete (124) está dotada con al menos una porción de ondulaciones regulares (125) en contacto con el espécimen tipo bloque a ensayar.
12. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción inferiores comprenden un soporte de espécimen inferior (121) de forma anular provisto de al menos un tornillo de apriete (126) dispuesto radialmente respecto a dicho soporte de espécimen inferior (121), en el que dicho tornillo de apriete (126) está dotada con al menos una porción de ondulaciones regulares (127) en contacto con el espécimen tipo bloque a ensayar.
13. Dispositivo mecánico acoplable en una plataforma tipo Stewart según las reivindicaciones 11 y 12, caracterizado por presentar un pivote (135) entre dicho tornillo de apriete (124, 126) y dicha porción de ondulaciones regulares (125, 127).
14. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción superiores comprenden al menos una unidad de aplicación de carga (81) y una placa superior principal (70), estando dotada dicha placa superior principal (70) de al menos un canal (83) tal que dicha unidad de aplicación de carga (81) es deslizable a lo largo de dicho canal (83).
15. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción inferiores comprenden al menos dos unidades de soporte (77) y una placa inferior principal (71), estando dotada dicha placa inferior principal (71) de al menos un canal (79) tal que dicha unidad de soporte (77) es deslizable a lo largo de dicho canal (79).
16. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción superiores comprenden un miembro de soporte superior (87) de configuración cilíndrica hueca que presenta un roscado en su cara exterior y un alojamiento (90) susceptible de recibir un espécimen de tipo barra a ensayar, habiéndose provisto una tuerca (92) enroscable en el roscado de dicho miembro de soporte superior (87).
17. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 16, caracterizado por el hecho de que dicho miembro de soporte superior (87) presenta una pluralidad de acanaladuras (91) dispuestas al menos parcialmente a lo largo de su longitud.
18. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de que dichos medios de sujeción inferiores comprenden un miembro de soporte inferior (88) de configuración cilíndrica hueca que presenta un roscado
en su cara exterior y un alojamiento (94) susceptible de recibir un espécimen de tipo barra a ensayar, habiéndose provisto una tuerca (96) enroscable en el roscado de dicho miembro de soporte inferior (88).
19. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 18, caracterizado por el hecho de que dicho miembro de soporte inferior (88) presenta una pluralidad de acanaladuras (95) dispuestas al menos parcialmente a lo largo de su longitud.
20. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de presentar un sensor (57) de fuerza/momento entre dichos medios de fijación superiores y dichos medios de sujeción superiores, siendo capaz el sensor (57) de medir las cargas y/o los momentos aplicados al espécimen a ensayar.
21. Dispositivo mecánico acoplable en una plataforma tipo Stewart según la reivindicación 1, caracterizado por el hecho de presentar un sensor (57) de fuerza/momento entre dichos medios de fijación inferiores y dichos medios de sujeción inferiores, siendo capaz el sensor (57) de medir las cargas y/o los momentos aplicados al espécimen a ensayar.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]