Procedimiento de maniobra de un dispositivo de transferencia de carga de fondo móvil y dispositivo asociado.
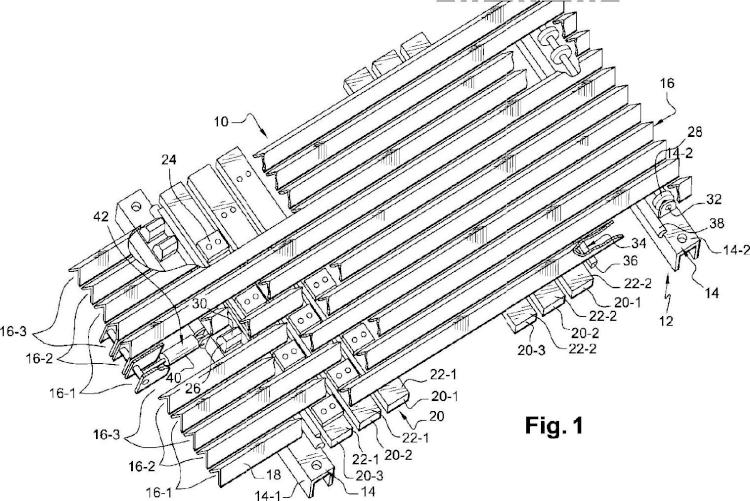
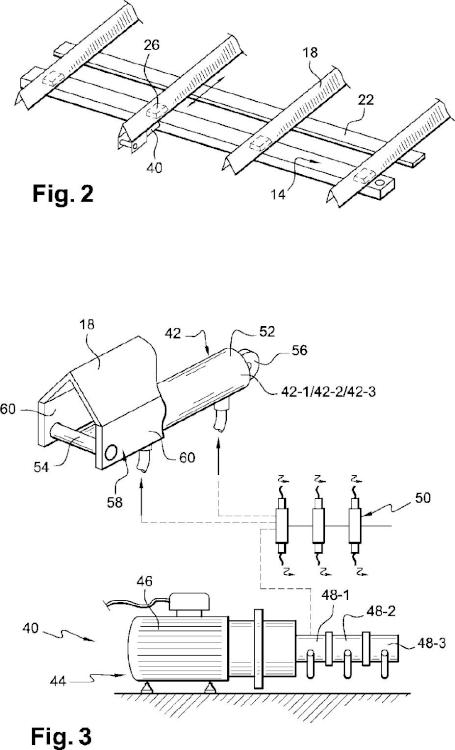
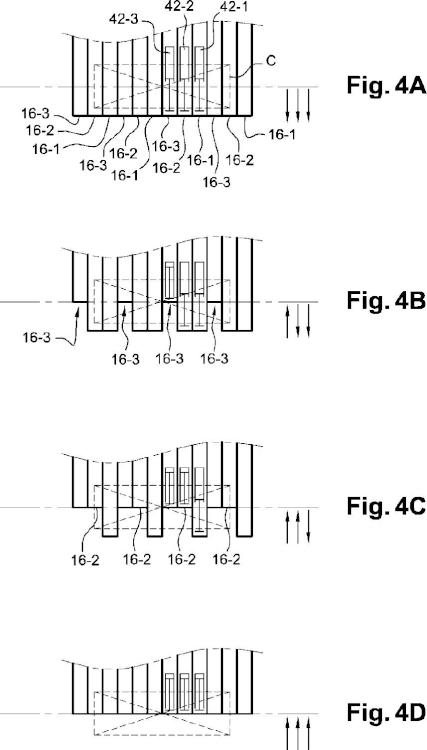
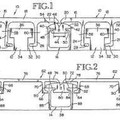
Procedimiento de maniobra de un dispositivo de transferencia de cargas de fondo móvil que comprende por lo menos dos juegos (16-1,
16-2, 16-3) de barras (18) móviles en traslación de forma síncrona en el sentido de desplazamiento, y móviles en traslación de forma sucesiva en el sentido opuesto al desplazamiento, unos medios (40) de maniobra de estos juegos de barras con gatos (42-1, 42-2, 42-3) hidráulicos, caracterizado por que están previstas unas bombas (48-1, 48-2, 48-3) de alimentación de los gatos hidráulicos, una bomba por gato hidráulico, para alimentar simultáneamente dichos gatos hidráulicos (42-1, 42-2, 42-3) con un caudal de fluido hidráulico idéntico de manera que se hagan desplazar los juegos (16-1, 16-2, 16-3) de barras (18) simultáneamente.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/052318.
Solicitante: La Mecanique Et Ses Applications - Atelier P. Vergnaud.
Nacionalidad solicitante: Francia.
Dirección: Zone Artisanale "Les Farges" 24580 Rouffignac Saint Cernin De Reilhac FRANCIA.
Inventor/es: VERGNAUD,PHILIPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G25/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 25/00 Transportadores que tienen portacargas o un impulsor de movimientos cíclicos, p.ej. de vaivén, que se desprende de la carga durante el movimiento de retorno (de sacudidas B65G 27/00). › de portacargas, p. ej. de correas.
PDF original: ES-2553195_T3.pdf
Patentes similares o relacionadas:
Procedimiento y dispositivo para enfriar una capa de material a granel dispuesta sobre una rejilla de transporte, del 5 de Julio de 2017, de Alite GmbH: Rejilla de transporte para el transporte y la refrigeración de material a granel, que comprende un fondo de rejilla con varios tablones dispuestos […]
Distribución de la entrada de clínker de un enfriador de clínker de cemento, del 4 de Enero de 2017, de Alite GmbH: Una parrilla de distribución de entrada de clínker para enfriar el clínker que está siendo descargado por medio de una entrada de clínker de […]
 Dispositivo de transporte, del 16 de Febrero de 2016, de KUKA SYSTEMS GMBH: Dispositivo de transporte para el transporte paso a paso de piezas de trabajo con un movimiento de avance y de elevación, en el que el dispositivo de transporte […]
Dispositivo de transporte, del 16 de Febrero de 2016, de KUKA SYSTEMS GMBH: Dispositivo de transporte para el transporte paso a paso de piezas de trabajo con un movimiento de avance y de elevación, en el que el dispositivo de transporte […]
 Transportador alternativo de lamas, con lamas móviles entre lamas fijas, del 15 de Marzo de 2013, de KEITH MANUFACTURING CO: Una lama transportadora extruida para un transportador alternativo de lamas, que comprende:
un cuerpo alargado de lama que tiene una pared superior , unas […]
Transportador alternativo de lamas, con lamas móviles entre lamas fijas, del 15 de Marzo de 2013, de KEITH MANUFACTURING CO: Una lama transportadora extruida para un transportador alternativo de lamas, que comprende:
un cuerpo alargado de lama que tiene una pared superior , unas […]
 Transportadores de placas con placas en v y de movimiento en vaivén, del 12 de Septiembre de 2012, de KEITH MANUFACTURING CO: Un transportador de placas con movimiento en vaivén, que comprende
un bastidor de transportador que incluye
un par de vigas laterales , separadas […]
Transportadores de placas con placas en v y de movimiento en vaivén, del 12 de Septiembre de 2012, de KEITH MANUFACTURING CO: Un transportador de placas con movimiento en vaivén, que comprende
un bastidor de transportador que incluye
un par de vigas laterales , separadas […]
 Cinta transportadora alternativa con sellado a presión, del 11 de Abril de 2012, de FOSTER, RANDALL MARK: Estructura de cinta para una cinta transportadora de movimiento alternativo compuesta por listones , , , de cinta situados lado-a-lado que comprende:
listones […]
Cinta transportadora alternativa con sellado a presión, del 11 de Abril de 2012, de FOSTER, RANDALL MARK: Estructura de cinta para una cinta transportadora de movimiento alternativo compuesta por listones , , , de cinta situados lado-a-lado que comprende:
listones […]
APARATO DE RECUPERACION DE ENVASES., del 16 de Abril de 2007, de WINCOR NIXDORF INTERNATIONAL GMBH: Unidad para aparatos de recuperación de envases en posición tendida, en especial botellas o botes, con un dispositivo de alimentación […]
CINTAS TRANSPORTADORAS DE LISTONES DE MOVIMIENTO ALTERNATIVO CON ELEMENTOS DE SELLADO A PRESIÓN, del 24 de Noviembre de 2011, de FOSTER, RANDALL MARK: En una cinta transportadoras de listones de movimiento alternativo compuesta por listones , , , de cinta situados lado-a-lado, cada uno de […]