Procedimiento para hacer funcionar un procesador en un entorno en tiempo real.
Procedimiento para hacer funcionar un procesador (6) en un entorno en tiempo real (1),
en donde el procesador (6), después del tratamiento de un evento en tiempo real (EZE, EZE1 a EZE3), se conmuta de un estado de funcionamiento (BZ) a un estado de reposo (RZ), en donde se genera una señal auxiliar (HS) en el caso de la aparición previa próxima de un evento en tiempo real subsiguiente (EZE, EZE1 a EZE3), mediante la cual el procesador (6) se conmuta, antes de la aparición del evento en tiempo real subsiguiente (EZE, EZE1 a EZE3), al estado de funcionamiento (BZ), caracterizado porque el procesador (6) trata eventos en tiempo real (EZE) en forma de una señal de al menos un sensor (3), en donde la señal es generada por el sensor (3), cuando éste detecta que se supera o se desciende por debajo de un valor umbral prefijado (SW) de una magnitud (s), en donde, después del tratamiento de un evento en tiempo real (EZE), el procesador (6) se conmuta de un estado de funcionamiento (BZ) a un estado de reposo (RZ), en donde mediante al menos un sensor auxiliar (4, 4') se detecta que se supera o se desciende por debajo de un valor umbral auxiliar prefijado (HSW, HSW') de la magnitud (s), y el sensor auxiliar (4) genera la señal auxiliar (HS), en donde el valor umbral auxiliar (HSW, HSW') se alcanza durante la variación del valor de la magnitud (s) antes del valor umbral (SW).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/059616.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: HILDNER,CHRISTIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B19/042 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › que utilizan procesadores digitales (G05B 19/05 tiene prioridad).
- G06F1/32 G […] › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 1/00 Detalles no cubiertos en los grupos G06F 3/00 - G06F 13/00 y G06F 21/00 (arquitecturas de computadores con programas almacenados de propósito general G06F 15/76). › Medios destinados a economizar energía.
PDF original: ES-2532207_T3.pdf
Fragmento de la descripción:
Procedimiento para hacer funcionar un procesador en un entorno en tiempo real Los entornos en tiempo real son casos aplicativos de ordenadores o dispositivos de tratamiento de datos similares, que tienen que entregar un determinado resultado o una reacción no sólo correctamente, sino también de forma garantizada dentro de un periodo de tiempo predeterminado, para asegurar un proceso sin fricciones de una instalación, por ejemplo de un robot.
Los potentes procesadores actuales, que se usan en los ordenadores, presentan con frecuencia unas elevadas potencias disipadas con la correspondiente formación de calor. Por ello está previsto con frecuencia un modo de ahorro de energía o estado de reposo, al que pueden conmutarse los procesadores cuando no se necesitan provisionalmente.
En los entornos en tiempo real los modos de ahorro de energía de los procesadores modernos no pueden usarse evidentemente casi nunca, ya que el tiempo de encendido necesario para la reinicialización del proocesador, desde el estado de reposo a un estado de funcionamiento, limita el tiempo de latencia del sistema, de tal modo que dado el caso no se cumplen los requisitos de timing. El tiempo de latencia es el espacio de tiempo entre un evento en tiempo real, por ejemplo una señal de sensor, y el último momento admisible para la reacción necesaria al evento en tiempo real.
El documento WO 2009/148472 A2 hace patente un dispositivo electrónico con un procesador y un planificador de ahorro de energía, que gestiona una tabla de eventos en la que se archivan eventos terminados y para cada uno de estos eventos un cronofechador y una duración de tolerancia. Conforme a los cronofechadores y duraciones de tolerancia archivados se cambia el funcionamiento del procesado entre un estado de reposo y un estado de funcionamiento.
El documento US 2008/0114967 A1 hace patente un dispositivo de circuito de conmutación integrado con sensores térmicos, bloques de cálculo y un bloque de control para controlar el funcionamiento de los bloques de cálculo en función de señales de los sensores térmicos.
Por ello la tarea de la invención consiste en indicar un procedimiento mejorado para hacer funcionar un procesador en un entorno en tiempo real.
La tarea es resuelta conforme a la invención mediante un procedimiento con las características de la reivindicación 1.
Unos perfeccionamientos ventajosos son objeto de las reivindicaciones subordinadas.
En un procedimiento conforme a la invención para hacer funcionar un procesador en un entorno en tiempo real, el procesador, después del tratamiento de un evento en tiempo real, se conmuta de un estado de funcionamiento a un estado de reposo (también llamado modo de ahorro de energía, low power state o idle state) , en donde se genera una señal auxiliar en el caso de la aparición previa muy próxima de un evento en tiempo real subsiguiente, mediante la cual el procesador se conmuta, antes de la aparición del evento en tiempo real subsiguiente, al estado de funcionamiento (también llamado modo a plena carga o full operation mode) . De este modo puede reaccionase al evento en tiempo real esperado, a pesar de la utilización del estado de reposo, con un tiempo de latencia mínimo. Mediante el estado de reposo puede ahorrarse energía y reducirse la emisión de calor.
En una primera forma de ejecución del procedimiento para hacer funcionar un procesador en un entorno en tiempo real, el procesador, después del tratamiento de un primer evento en tiempo real, se conmuta de un estado de funcionamiento a un estado de reposo. La señal auxiliar es generada por un temporizador. Una vez transcurrido un intervalo diferencial, que comprende un intervalo de tiempo conocido entre dos eventos en tiempo real consecutivos restando un intervalo de seguridad, el procesador se conmuta mediante el temporizador al estado de funcionamiento, de tal modo que puede reaccionarse con un tiempo de latencia mínimo al evento en tiempo real esperado. Esta forma de ejecución es apropiada para entornos en tiempo real con comportamientos de timing bien conocidos, es decir, aquellos entornos en tiempo real en los que se conoce el intervalo de tiempo exacto entre dos eventos en tiempo real. De esta manera puede ahorrarse energía y reducirse la emisión de calor.
El intervalo de seguridad debe elegirse de tal modo que el procesador, al producirse el evento en tiempo real, se conmute con seguridad al estado de funcionamiento y esté preparado para tratar el evento en tiempo real. De forma preferida se elige el intervalo de seguridad dentro de un margen de entre el 10% y el 30%, en especial el 20% de la duración del intervalo de tiempo conocido entre dos eventos en tiempo real consecutivos. El intervalo de tempo conocido entre dos eventos en tiempo real puede ser por ejemplo de cinco segundos. Como intervalo de seguridad 2 5
se elige por ejemplo un segundo, de tal manera que el procesador se conmuta al estado de reposo durante el intervalo diferencial de cuatro segundos.
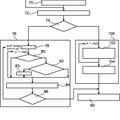
En otra forma de ejecución del procedimiento para hacer funcionar un procesador en un entorno en tiempo real, el procesador trata eventos en tiempo real en forma de una señal de al menos un sensor. La señal es generada por un sensor, cuando éste detecta que se supera o se desciende por debajo de un valor umbral prefijado de una magnitud. Después del tratamiento de un primer evento en tiempo real, el procesador se conmuta de un estado de funcionamiento a un estado de reposo. Asimismo está previsto al menos un sensor auxiliar, que vigila la misma magnitud, pero que detecta que se supera o se desciende por debajo de un valor umbral auxiliar prefijado de la magnitud, y tras esto genera la señal auxiliar. El valor umbral auxiliar se elige con ello de tal modo, que se alcanza durante la variación del valor de la magnitud antes del valor umbral. Mediante la señal auxiliar se conmuta el procesador al estado de funcionamiento, de tal modo que al alcanzarse a continuación el valor umbral, está preparado para reaccionar al evento en tiempo real, es decir a la señal del sensor. Esta forma de ejecución asegura, para aplicaciones en tiempo real en las que no se conoce o varía el intervalo de tiempo entre eventos en tiempo real consecutivos, que se mantenga el tiempo de latencia. También en esta forma de ejecución puede ahorrarse energía y reducirse la emisión de calor del procesador.
La magnitud vigilada por el sensor y el sensor auxiliar puede ser un tramo, en donde el valor umbral es una posición que al alcanzarse representa el evento en tiempo real. El valor umbral auxiliar es después una posición auxiliar, que se alcanza al recorrer el tramo antes de la posición.
La aplicación en tiempo real puede ser por ejemplo una aplicación accionada por motor. Un motor de accionamiento produce con ello durante su funcionamiento una variación de la magnitud vigilada por el sensor y el sensor auxiliar. Por ejemplo mediante el accionamiento del motor se recorre el tramo. Como consecuencia de haberse alcanzado la posición detectada por el sensor, el procesador desconecta el motor de accionamiento. Para que la desconexión se realice con precisión es necesario conservar el tiempo de latencia. Esto se garantiza mediante la otra forma de ejecución del procedimiento.
A cada sensor pueden asociarse dos sensores auxiliares, de los que uno detecta la superación del valor umbral auxiliar prefijado de la magnitud antes de superarse el valor umbral, en donde el otro sensor auxiliar detecta que se desciende por debajo de otro valor umbral auxiliar prefijado de la magnitud antes de descenderse por debajo del valor umbral. De esta forma puede detectarse por ejemplo una aproximación a la posición desde dos direcciones.
Las formas de ejecución del procedimiento pueden utilizarse ventajosamente en un robot.
A continuación se explican con más detalle unos ejemplos de ejecución de la invención con base en los dibujos. Aquí muestran:
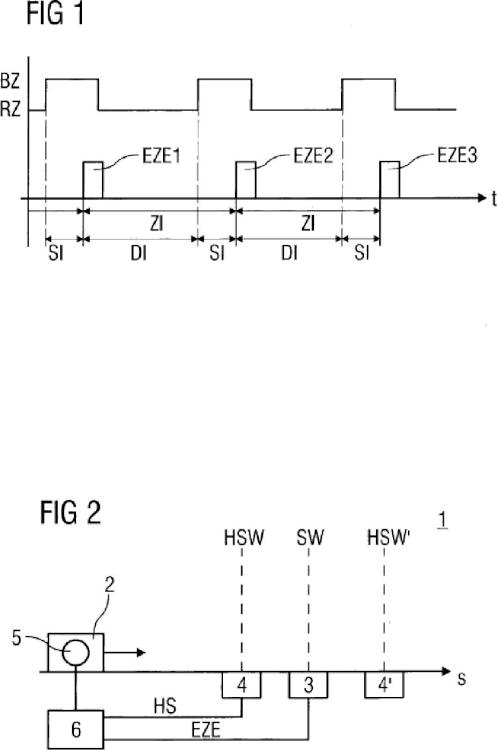
la figura 1 un diagrama de impulsos para visualizar un procedimiento para hacer funcionar un procesador en un entorno en tiempo real con un intervalo de tiempo conocido entre dos eventos en tiempo real consecutivos, y la figura 2 un entorno en tiempo real con un componente que se hace funcionar por motor, que recorre un tramo, en donde la posición del componente se vigila mediante un sensor y un sensor auxiliar.
La figura 1 muestra un diagrama de impulsos para visualizar un procedimiento para hacer funcionar un procesador en un entorno en tiempo real con un intervalo de tiempo conocido ZI entre dos eventos en tiempo real consecutivos EZE1, EZE2, EZE3.
En el momento en el que se produce el evento en tiempo real EZE1, el procesador se encuentra en un estado de funcionamiento... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para hacer funcionar un procesador (6) en un entorno en tiempo real (1) , en donde el procesador (6) , después del tratamiento de un evento en tiempo real (EZE, EZE1 a EZE3) , se conmuta de un estado de funcionamiento (BZ) a un estado de reposo (RZ) , en donde se genera una señal auxiliar (HS) en el caso de la aparición previa próxima de un evento en tiempo real subsiguiente (EZE, EZE1 a EZE3) , mediante la cual el procesador (6) se conmuta, antes de la aparición del evento en tiempo real subsiguiente (EZE, EZE1 a EZE3) , al estado de funcionamiento (BZ) , caracterizado porque el procesador (6) trata eventos en tiempo real (EZE) en forma de una señal de al menos un sensor (3) , en donde la señal es generada por el sensor (3) , cuando éste detecta que se supera o se desciende por debajo de un valor umbral prefijado (SW) de una magnitud (s) , en donde, después del tratamiento de un evento en tiempo real (EZE) , el procesador (6) se conmuta de un estado de funcionamiento (BZ) a un estado de reposo (RZ) , en donde mediante al menos un sensor auxiliar (4, 4â?) se detecta que se supera o se desciende por debajo de un valor umbral auxiliar prefijado (HSW, HSWâ?) de la magnitud (s) , y el sensor auxiliar (4) genera la señal auxiliar (HS) , en donde el valor umbral auxiliar (HSW, HSWâ?) se alcanza durante la variación del valor de la magnitud (s) antes del valor umbral (SW) .
2. Procedimiento según la reivindicación 1, caracterizado porque la señal auxiliar (HS) es generada por un temporizador, en donde el procesador (6) , una vez transcurrido un intervalo diferencial (DI) que comprende un intervalo de tiempo (ZI) conocido entre dos eventos en tiempo real consecutivos (EZE1 a EZE3) restando un intervalo de seguridad (SI) , se conmuta mediante el temporizador al estado de funcionamiento (BZ) .
3. Procedimiento según la reivindicación 2, caracterizado porque se elige el intervalo de seguridad (SI) dentro de un margen de entre el 10% y el 30%, de forma preferida el 20% de la duración del intervalo de tiempo (ZI) conocido entre dos eventos en tiempo real consecutivos (EZE1 a EZE3) .
4. Procedimiento según la reivindicación 1, caracterizado porque la magnitud vigilada por el sensor (3) y por el sensor auxiliar (4) es un tramo (s) , en donde el valor umbral (SW) es una posición que al alcanzarse o superarse representa el evento en tiempo real (EZE) .
5. Procedimiento según una de las reivindicaciones 1 ó 4, caracterizado porque el procesador (6) durante el tratamiento del evento en tiempo real (EZE) desconecta un motor de accionamiento (5) , en donde el motor de accionamiento (5) produce la variación de la magnitud (s) durante su funcionamiento.
6. Procedimiento según una de las reivindicaciones 1, 4 ó 5, caracterizado porque a cada sensor (3) se asocian dos sensores auxiliares (4, 4â?) , de los que uno detecta la superación del valor umbral auxiliar prefijado (HSW) de la magnitud (s) antes de superarse el valor umbral (SW) , y en donde el otro sensor auxiliar (4â?) detecta que se desciende por debajo de otro valor umbral auxiliar prefijado (HSWâ?) de la magnitud (s) antes de descenderse por debajo del valor umbral (SW) .
7. Utilización de un procedimiento según una de las reivindicaciones 1 a 6 en un robot.
Patentes similares o relacionadas:
 Procedimiento de optimización de la energía suministrada a una pluralidad de equipos distribuidos en un espacio, del 29 de Julio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de optimización de la energía total suministrada a una pluralidad de equipos de confort distribuidos en un espacio que consta de un módulo […]
Procedimiento de optimización de la energía suministrada a una pluralidad de equipos distribuidos en un espacio, del 29 de Julio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de optimización de la energía total suministrada a una pluralidad de equipos de confort distribuidos en un espacio que consta de un módulo […]
Aparato y método para controlar una señal de entrada, del 1 de Julio de 2020, de LSIS Co., Ltd: Un aparato para controlar una senal de manera que una senal de entrada del PLC (Controlador Logico Programable) se iguale a una senal de entrada de referencia (uc), caracterizado […]
Procedimiento para asociar automáticamente un módulo a un inversor correspondiente, y módulo y sistema de generación de energía relacionados, del 1 de Julio de 2020, de MARICI Holdings The Netherlands B.V: Procedimiento para asociar automáticamente un módulo a un inversor (10a) correspondiente de una pluralidad de inversores (10a, 10b, 10c) que están […]
Procedimiento y disposición para el control remoto de dispositivos de campo de al menos un sistema de automatización, del 17 de Junio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento para el control remoto de al menos un dispositivo de campo (D1... Dn) en al menos un sistema de automatización (P1... Pk) con una unidad de control (BG); […]
Dispositivo de campo y método de suministro de información, del 3 de Junio de 2020, de Yokogawa Electric Corporation: Dispositivo de campo , que comprende: una pluralidad de tipos de sensores (30a a 30e); al menos un convertidor (20a a 20e) configurado para adquirir resultados […]
Procedimiento para el control de un accionamiento, del 20 de Mayo de 2020, de Siemens Energy Global GmbH & Co. KG: Procedimiento para el control de un accionamiento con al menos un convertidor , al menos un motor y un control de un accionamiento asociado; en donde está […]
Sistema y método de control en bucle cerrado de firma de objetivo, del 6 de Mayo de 2020, de EMHART GLASS S.A.: Un sistema para ajustar automáticamente la regulación temporal de sucesos de operaciones en cavidades de una sección de una máquina de secciones individuales, […]
Montaje compuesto por un sistema de desbloqueo de emergencia y un sistema de diagnóstico para verificar el funcionamiento del sistema de desbloqueo de emergencia, del 6 de Mayo de 2020, de KLAW PRODUCTS LIMITED: Un montaje para transferir materia entre los primer y segundo objetos separados por una distancia, siendo móviles uno o ambos de los primer y segundo objetos para aumentar […]