Sistema y método para la gestión de unidades de accionamiento móviles.
Un sistema de inventario automatizado (10) para transportar artículos de inventario,
que comprende:
una unidad de accionamiento móvil (20) autoalimentada operable para: recibir una respuesta de ruta (24) que identifica un camino (16) entre un primer punto y un segundo punto, en donde:
el camino (16) comprende al menos un segmento inicial (17) y uno o más segmentos (17) adicionales;
el segmento (17) inicial incluye una parte del camino (16) adyacente al primer punto; y al menos uno de los segmentos (17) adicionales incluye una parte del camino (16) adyacente al segundo punto;
almacenar el camino (16);
transmitir una petición de reserva para reservar el segmento (17) inicial del camino (16);
recibir una respuesta de reserva que indica que se ha reservado el segmento inicial;
alejarse del primer punto a lo largo del segmento (17) inicial en respuesta a reservar el segmento inicial;
después de iniciar el movimiento a lo largo del segmento (17) inicial, reservar cada uno de los segmentos (17) adicionales del camino (16) a través de transmisiones sucesivas de peticiones de reserva después de iniciar el movimiento a lo largo de un segmento reservado; y
en respuesta a reservar cada segmento, moverse hacia el segundo punto a lo largo de cada uno de los segmentos (17) adicionales mientras que está reservado ese segmento (17);
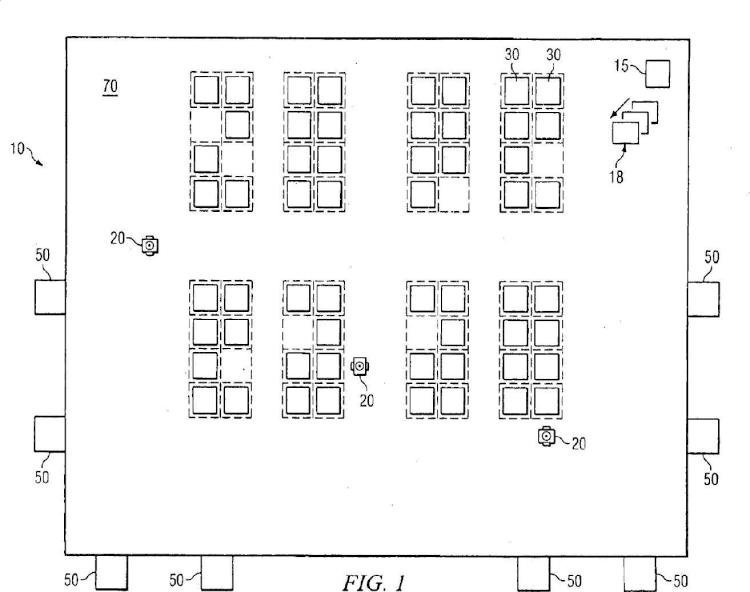
un módulo de planificación de ruta (94) operable para transmitir la respuesta de ruta (24) a la unidad de accionamiento móvil (20), en donde la respuesta de ruta (24) define el camino (16) en un espacio de trabajo (70) entre el primer punto y el segundo punto;
un módulo de reserva de segmento (96) operable para:
recibir la petición de reserva (26) desde la unidad de accionamiento móvil (20), la petición de reserva (26) que identifica un segmento (17) solicitado para ser reservado;
en respuesta a recibir la petición de reserva (26), determinar si el segmento (17) solicitado está disponible para ser reservado para la unidad de accionamiento móvil (20) solicitante para evitar colisiones con otras unidades de accionamiento móviles (20) mientras que se mueve a través del segmento reservado; y
transmitir una respuesta de reserva (28) a la unidad de accionamiento móvil (20) solicitante, en donde la respuesta de reserva (28) indica si se ha reservado el segmento (17) solicitado,
en donde la unidad de accionamiento móvil está configurada para:
transmitir una petición de reserva al módulo de reserva de segmento (96) para cada uno de los segmentos adicionales mientras que se mueve a lo largo del segmento reservado cuando la unidad de accionamiento móvil determina que hay menos de una parte predeterminada del segmento reservado dejada de completar y un segmento adicional en el camino permanece para ser completado;
moverse a lo largo del segmento reservado y el segmento adicional si el segmento adicional se reserva con éxito;
intentar reservar el segmento adicional de nuevo mientras que se mueve a lo largo del segmento reservado después de una cantidad de tiempo predeterminada si el segmento adicional no está reservado; y
si el segmento adicional no está reservado antes de que la unidad de accionamiento móvil alcance el final del segmento reservado, hacer una pausa al final del segmento reservado hasta que el segmento adicional esté reservado o se obtenga un camino alternativo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/012976.
Solicitante: Amazon Technologies, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: P.O. Box 8102 Reno, NV 89507 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MOUNTZ,MICHAEL,C, D\'ANDREA,RAFFAELLO, WURMAN,PETER R, BARBEHENN,MICHAEL T, HOFFMAN,ANDREW E.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2553185_T3.pdf


Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]