Proceso para filtrar interferogramas obtenidos de imágenes SAR conseguidas en la misma área.
Un proceso para filtrar interferogramas obtenidos de imágenes SAR,
conseguidas en la misma área por radares de abertura sintética, que comprende los siguientes pasos:
a) conseguir una serie de N imágenes de radar (A1...AN) por medio de un sensor SAR en una misma área con la consecución de geometrías tales para permitir el muestreo de nuevo de los datos en una rejilla común;
b) después de muestrear de nuevo en una rejilla común, seleccionar un pixel de la rejilla común;
c) calcular la matriz de coherencia del pixel seleccionado, esto es estimar los valores de coherencia complejos de cada posible par de imágenes disponible;
d) maximizar, con respecto al vector fuente q, aquí un elemento desconocido, la función:**Fórmula**
en donde R es el operador que extrae la parte real de un número complejo, γnm el módulo del elemento (n,m) de la matriz de coherencia, k un número real positivo, Φnm la fase del elemento (n,m) de la matriz de coherencia, θn y θm los elementos n y m del vector desconocido θ, los valores del factor desconocido que se estiman excepto una constante aditiva y los valores de fase θn así obtenidos que constituyen el vector de los valores de fase filtrados.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/059494.
Solicitante: Tele-Rilevamento Europa - T.R.E. Srl.
Inventor/es: FERRETTI, ALESSANDRO, FUMAGALLI,ALFIO, NOVALI,FABRIZIO, DE ZAN,FRANCESCO, RUCCI,ALESSIO, TEBALDINI,STEFANO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/90 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan técnicas de apertura sintética.
PDF original: ES-2539586_T3.pdf


Fragmento de la descripción:
Proceso para filtrar interferogramas obtenidos de imágenes SAR conseguidas en la misma área La presente invención se refiere a un proceso para filtrar interferogramas obtenidos de imágenes SAR, conseguidas en la misma área.
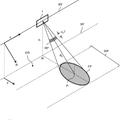
Como es bien sabido, un radar de abertura sintética o sistema SAR produce una imagen bidimensional. Una dimensión de la imagen se denomina alcance y es una medida de la distancia en la línea de visión desde el radar al objeto que está iluminado. La otra dimensión se denomina azimuth y es perpendicular al "alcance".
Un radar tipo SAR opera a una frecuencia generalmente entre 400 Mhz y 10 Ghz y está usualmente instalado en aviones o en plataformas de satélites que orbitan a una altitud de entre 250 y 800 Km. La antena de radar está dirigida al terreno ortogonalmente a la dirección del movimiento de la plataforma (avión o satélite) con un ángulo fuera del nadir de entre 20 y 80 grados con relación a la dirección del nadir, esto es, perpendicular al terreno.
Con dicho sistema es posible obtener imágenes de la superficie de la tierra con una resolución espacial de unos pocos metros, sintetizando (de aquí el nombre del sensor) , en la dirección del azimuth, una antena de unas dimensiones mucho mayores que las actuales mediante el uso de unos algoritmos apropiados bien conocidos en la bibliografía.
El documento "Interferometría SAR de paso repetido con objetivos parcialmente coherentes" de Daniel Pressin y otros, Actas sobre franjas 2007: 26-30 Noviembre 2007, ESRIN; Frascati, Italia (IN: ESA-SP) , ESA, Agencia Espacial Europea, nº 649, página 7PP, XP007911824 explica un nuevo algoritmo de procesamiento de datos que permite extractar información de objetivos parcialmente coherentes mediante el uso de datos I SAR obtenidos desde vehículos espaciales. De este modo se pueden alcanzar unas muy altas densidades de puntos también en áreas extraurbanas para monitorizar fenómenos de deformación lineal superficial.
El documento "Movimiento desde PS hacia objetivos que se descorrelacionan lentamente: Una visión en perspectiva" EUSAR 2008: Actas de la 7ª Conferencia Europea sobre Radares de Abertura Sintética, 2-5 Junio 2008; Friedrichshafen Alemania, página 3PP, XP007911823 explica que el análisis de la matriz de covariancia procesada pixel por pixel daría como resultado un elemento necesario para el examen de la descorrelación del objetivo.
La característica más importante del SAR es que el sensor es del tipo coherente y de este modo las imágenes son matrices de números complejos en los que los valores de la amplitud están ligados a la potencia retrodispersada de los objetos iluminados (esto es, a su sección transversal del radar) , en tanto que la fase se determina por la naturaleza del objetivo y su distancia desde el radar. Asociado con cada pixel de una imagen de radar, I, identificado por una cierta coordenada r del alcance y una coordenada a del azimuth, hay por lo tanto un número complejo:
I (r, a) = x+i·y = A·ei
en donde x e y identifican las partes real e imaginaria del número, A su amplitud y el valor de fase, e i es la unidad imaginaria, o la raíz cuadrada de -1.
Dada la posibilidad de obtener imágenes independientemente de la luz solar y del estado de la cobertura de nubes, el tratamiento de las imágenes SAR se presta a una variedad de aplicaciones; entre las cuales son de una importancia primaria las aplicaciones ligadas a la identificación y clasificación de objetivos y a la detección de cambios y aplicaciones interferométricas. Las últimas están usualmente dirigidas a la obtención de modelos de 50 elevación digitales y/o al análisis de las deformaciones superficiales del terreno sobre la base de conjuntos de datos SAR multitemporales.
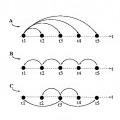
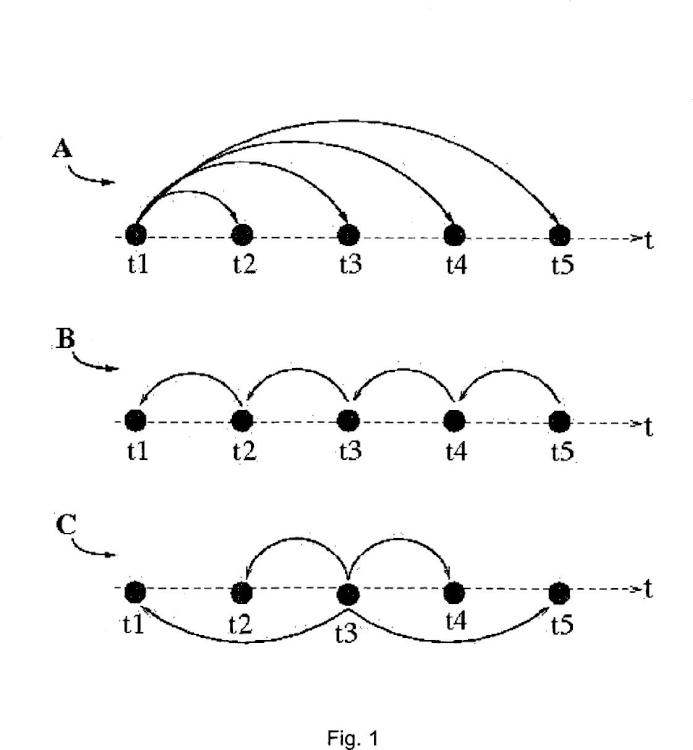
Dadas dos imágenes SAR genéricas, identificadas como In e Im, conseguidas en una misma área de interés y muestreadas de nuevo en una rejilla común, se define un interferograma nm como resultado de la multiplicación 55 compleja de una imagen por el valor conjugado complejo de la segunda:
- imi (n -m)
nm = In·I *m = An·e in· Am·e = AnAme en donde I* indica la imagen en la que los valores complejos han sido transformados en los valores conjugados 60 complejos cambiando el signo de los valores de fase. De este modo se observa que la fase del interferograma, también llamada fase interferométrica, está dada por la diferencia entre las fases de las dos imágenes.
La fase de cada pixel de una imagen SAR (identificada por una cierta coordenada r del alcance y una coordenada a del azimuth) puede ser vista como la suma de una contribución vinculada a la naturaleza del objeto iluminado,
llamada "fase de reflexividad", y una contribución d vinculada al camino óptico de la onda electromagnética y de este modo a las características del medio de transmisión y a la distancia sensor-objetivo:
(r, a) = (r, a) + d (r, a)
Si las características electromagnéticas del objeto permanecen sin cambios a lo largo del tiempo, no habrá variaciones en el término vinculado a la fase de reflexividad () , de modo que cualesquiera variaciones de la fase que sean mostradas mediante la consideración de varias consecuciones estarán vinculadas a las posibles variaciones en el camino óptico.
De particular interés son las aplicaciones que llevan a la reconstrucción de una serie histórica de movimientos, es decir la capacidad de monitorizar, a lo largo del tiempo, cualesquiera movimientos de un objeto sobre el terreno cuya reflexividad permanezca sin cambios y en donde sea posible separar las contribuciones de fase debidas al medio de transmisión.
Operativamente, dada una serie de N imágenes SAR conseguidas en una misma área en momentos diferentes, pero muestreadas de nuevo en una rejilla común, se desea calcular, para cada pixel de la imagen, una serie histórica de N valores de fase (es decir, un valor para cada consecución efectuada en el área de interés) , en la que aplicar unos algoritmos apropiados para estimar cualesquiera movimientos del objetivo del radar a lo largo de la dirección identificada por la línea de visión sensor-objetivo.
La calidad de la estimación depende en gran medida del hecho de que la fase de reflexividad de una cierta celda de resolución permanezca constante a lo largo del tiempo. Si se verifica esta hipótesis, mediante el cálculo de las diferencias de los valores de fase de las diferentes consecuciones con respecto, por ejemplo, a la primera imagen, es posible poner de manifiesto las contribuciones debidas solamente a variaciones en el camino óptico. Se debería tener en cuenta, por lo tanto, que solamente la diferencia entre los valores de fase de dos consecuciones proporciona información y no la fase de una única imagen, dado que los valores de fase de la reflexividad son desconocidos y varían de un pixel a otro; es por lo tanto la fase interferométrica la que permite que sea visualizado el mapa de cualesquiera deformaciones de la superficie.
Los valores de reflexividad de una escena de radar real no son usualmente constantes en todas las consecuciones disponibles, excepto para un limitado número de objetos, denominados dispersadores permanentes, en los que es posible aplicar unos algoritmos específicos (Patente Europea EP-1183551, Solicitud de Patente Italiana IT MI19991154, fechada el 27.11.2007) .
No obstante, hay muchos otros pixeles de imágenes en los que la información relacionada con el camino óptico (es decir, la señal de interés) puede ser extraída solamente en algunos interferogramas o, hablando más generalmente, la relación señal-ruido varía significativamente según el par de imágenes consideradas. Esto significa que la hipótesis de invariancia del término fase de reflexividad () puede ser solamente satisfecha parcialmente.
Hay dos mecanismos principales que llevan a una variación en los valores de la fase de reflexividad: (a) la descorrelación temporal, es decir las variaciones en las características electromagnéticas de un objeto a lo largo del tiempo; (b) la descorrelación geométrica o espacial, provocada por las variaciones en la geometría de consecución. El primer mecanismo depende de la denominada "línea de base temporal" del interferograma, o, en el caso de un conjunto de imágenes conseguidas en momentos diferentes, de la distancia temporal entre las dos imágenes usadas para generar el interferograma. El segundo mecanismo depende en cambio de la denominada "línea de base geométrica", es decir de la distancia entre las trayectorias seguidas por el sensor durante las dos consecuciones.
Con el fin de medir la relación señal-ruido (es decir, la calidad) de los interferogramas generados a partir de las imágenes genéricas... [Seguir leyendo]
Reivindicaciones:
1. Un proceso para filtrar interferogramas obtenidos de imágenes SAR, conseguidas en la misma área por radares de abertura sintética, que comprende los siguientes pasos:
a) conseguir una serie de N imágenes de radar (A1AN) por medio de un sensor SAR en una misma área con la consecución de geometrías tales para permitir el muestreo de nuevo de los datos en una rejilla común; b) después de muestrear de nuevo en una rejilla común, seleccionar un pixel de la rejilla común; c) calcular la matriz de coherencia del pixel seleccionado, esto es estimar los valores de coherencia complejos de cada posible par de imágenes disponible; d) maximizar, con respecto al vector fuente , aquí un elemento desconocido, la función:
T = R
NN
kii ( )
nm nm
nm ee
n=1 m=1
·
en donde R es el operador que extrae la parte real de un número complejo, nm el módulo del elemento (n, m) de la matriz de coherencia, k un número real positivo, nm la fase del elemento (n, m) de la matriz de coherencia, n y m los elementos n y m del vector desconocido , los valores del factor desconocido que se estiman excepto una constante aditiva y los valores de fase n así obtenidos que constituyen el vector de los valores de fase filtrados.
2. Un proceso de acuerdo con la reivindicación 1, caracterizado por que dicha constante aditiva se fija estableciendo 1 = 0.
3. Un proceso de acuerdo con la reivindicación 1, caracterizado por que cada elemento de la matriz de coherencia se evalúa por medio de la ecuación:
c
nm
en donde está indicada con F una ventana de estimación apropiada alrededor del pixel seleccionado, x (p) el elemento p-ésimo de la ventana F de estimación, n y m las imágenes n-ésima y m -ésima que pertenecen al grupo de N imágenes SAR muestreadas de nuevo en una rejilla común.
4. Un proceso de acuerdo con la reivindicación 1, caracterizado por que los N elementos del vector fuente están ligados por una relación polinómica, asignable a la siguiente forma:
n = g (tn, Bn)
en donde tn es el momento de la consecución de la imagen n-ésima con respecto a la primera consecución, Bn la línea de base normal de la imagen n-ésima todavía con respecto a la primera consecución, siendo maximizada la función con respecto a los coeficientes del polinomio g.
5. Un proceso de acuerdo con la reivindicación 1, caracterizado por que los N elementos del vector fuente están ligados por una relación lineal, atribuible a la siguiente forma:
n=C··tn + Ch·h·Bn en donde Cv y Ch son unos parámetros conocidos que dependen de la geometría de consecución y del sensor utilizado, tn el momento de la consecución de la imagen n-ésima con respecto a la primera consecución, Bn la línea de base normal de la imagen n-ésima todavía con respecto a la primera consecución, en el proceso de optimización, con también tn y Bn conocidos, en donde se estiman solamente los valores y h, vinculados respectivamente a la velocidad media de desplazamiento y a la elevación del objeto que ocupa el pixel seleccionado.
6. Un proceso de acuerdo con la reivindicación 1, caracterizado por que las N imágenes conseguidas por medio de un SAR se consiguen en momentos diferentes.
7. Un proceso de acuerdo con la reivindicación 1, caracterizado por que las N imágenes conseguidas por medio de un SAR se consiguen con unos ángulos de visión diferentes.
xn ( p) xm * ( p)
** (Ver fórmula) **
x
x
n m
8. Un ordenador que comprende una memoria y un microprocesador adaptado para intercambiar datos con la memoria, y dicha memoria comprende un soporte lógico de la aplicación que está instalado en la memoria y que funciona, dicho soporte lógico es apropiado para poner en práctica el proceso para filtrar interferogramas conseguidos de imágenes SAR obtenidas en la misma área de acuerdo con cualquiera de las anteriores reivindicaciones.
Patentes similares o relacionadas:
 Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Radar de formación de imágenes subsuperficie, del 22 de Abril de 2020, de SAAB AB: Un procedimiento para eliminar los ecos parásitos superficiales en el radar de apertura sintética, SAR, formación de imágenes de objetivos de subsuperficie […]
Detección de barcos en datos de radar de interferometría, del 15 de Enero de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para averiguar una posición y una dirección de navegación en cada caso para uno o varios vehículos acuáticos que navegan en el agua a partir de datos de interferometría […]
Radar interferométrico con antena giratoria, del 25 de Diciembre de 2019, de UNIVERSITA' DEGLI STUDI DI FIRENZE: Un radar interferométrico, que comprende: un brazo , que gira con respecto a un eje (z) de un plano (zx) ortogonal a un eje de rotación (y); un […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
Búsqueda e identificación electromagnética en zonas de campo cercano, del 8 de Mayo de 2019, de Levitection Ltd: Un procedimiento de detección, que comprende las etapas de: (a) transmitir secuencialmente una señal de cada uno de una pluralidad de transmisores (TE); (b) recibir, […]
Procedimiento para el funcionamiento de un sistema de radar con apertura sintética en el modo de emisión y recepción, del 1 de Mayo de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el funcionamiento de un sistema de radar asistido por satélite con apertura sintética, donde el sistema de radar comprende […]