Dispositivo de supervisión del buen funcionamiento de una pluralidad de dispositivos, particularmente de actuadores.
Dispositivo de supervisión (60) de una pluralidad de actuadores (500),
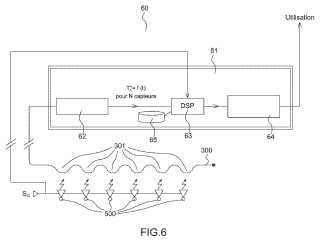
que comprende una fibra óptica (300) quecomprende una pluralidad de captadores (301), estando cada captador (301) dispuesto en la proximidad de unmicroactuador (500), y presentando unas propiedades ópticas que varían en función de al menos un parámetrofísico, las evoluciones del parámetro físico durante el funcionamiento del microactuador (500) definen su firma,comprendiendo igualmente el dispositivo de supervisión (60) un dispositivo interrogador (62) para red de fibra ópticaconectado a la fibra óptica (300) y comprendiendo al menos un emisor y un receptor, y unos medios de tratamiento(63) adecuados para modular la frecuencia de la señal óptica emitida por el emisor de manera que se seleccione elcaptador (301) en la proximidad de un microactuador (500) dado, y caracterizado porque los medios de tratamientoson adecuados para comparar la señal óptica recibida, representativa de la firma del microactuador (500), con unafirma característica del buen funcionamiento del microactuador (500).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10191447.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: GUICHARD,M. PHILIPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C21/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › Perturbación del flujo de aire sobre las superficies de aeronaves actuando sobre el flujo de la capa límite (control de capa límite en general F15D).
- G01M11/08 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 11/00 Ensayo de aparatos ópticos; Ensayo de aparatos y estructuras por métodos ópticos, no previstos en otro lugar. › Ensayos de las propiedades mecánicas.
- H04L12/403 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04L TRANSMISION DE INFORMACION DIGITAL, p. ej. COMUNICACION TELEGRAFICA (disposiciones comunes a las comunicaciones telegráficas y telefónicas H04M). › H04L 12/00 Redes de datos de conmutación (interconexión o transferencia de información o de otras señales entre memorias, dispositivos de entrada/salida o unidades de tratamiento G06F 13/00). › con control centralizado, p. ej. interrogación.
PDF original: ES-2414643_T3.pdf
Fragmento de la descripción:
Dispositivo de supervisión del buen funcionamiento de una pluralidad de dispositivos, particularmente de actuadores La presente invención se refiere un dispositivo de supervisión del buen funcionamiento de una pluralidad de dispositivos repartidos en una estructura, particularmente de actuadores. Se aplica a la supervisión del buen funcionamiento de equipos y de sistemas, particularmente implementados en vehículos, y más particularmente en aeronaves.
Existe, particularmente en el dominio de los transportes, un número creciente de sistemas a bordo que comprenden una pluralidad de actuadores, repartidos en una estructura, a veces en gran número. El desarrollo de actuadores de dimensiones cada vez más reducidas permite una mejor integración de éstos, y por lo tanto, un creciente número de ellos en el seno de un sistema dado. En el dominio aeronáutico, por ejemplo, es deseable que se implementen en las aeronaves un número siempre creciente de actuadores de diferentes tipos, con el fin de permitir una gestión optimizada del vuelo para unas acciones localizadas con precisión. Dichos actuadores se activan sobre la base de medidas provenientes de una pluralidad de captadores de parámetros físicos. Estos conjuntos de captadores y actuadores participan en el vuelo de la aeronave, optimizando el equilibrio energético entre otras funciones. Finalmente, un segundo conjunto de captadores asegura la vigilancia sobre el estado de salud detallado y en tiempo real del vehículo, habitualmente diseñado de acuerdo con la expresión anglosajona “Health Monitoring”; en este caso, los captadores participan en el refuerzo de la seguridad de vuelo, así como en unas operaciones de mantenimiento optimizadas. De ese modo, un ala de aeronave perfeccionada se prevé que contenga una población numerosa de microequipamientos dispersos en ella. Tal ala puede en efecto comprender una pluralidad —varias decenas, incluso centenares— de miniactuadores que permiten controlar en unos puntos precisos de la superficie del ala, los flujos del aire. De este modo, un flujo de aire turbulento localizado sobre una parte de la superficie del ala, detectado por un captador previsto con ese fin, puede ser rectificado en un flujo laminar, por medio de uno o varios microactuadores dispuestos en la proximidad.
Se describen ahora los tipos de actuadores elegidos como ejemplo para permitir una descripción clara de la invención: los actuadores de capa límite. La invención se puede implementar con todo tipo de actuadores conocidos o por venir, con la condición de que dichos actuadores tengan un efecto físico cuya firma térmica y/o acústica sea medible, tal como será explicado más en detalle a continuación en el presente documento.
Los microactuadores supervisados pueden ser por ejemplo, unos microactuadores fluídicos, también denominados actuadores de chorro sintético por plasma, designados comúnmente de acuerdo con la terminología anglosajona “Plasma Synthetic Jet Actuators” o según la sigla correspondiente a ella “PSJA”. Los actuadores del tipo PSJA se encuentran en la forma de pequeñas cavidades que contienen plasma, un arco eléctrico calienta el contenido de la cavidad para producir una descarga del aire contenido en la cavidad, seguido de una expansión. Los actuadores del tipo PSJA pueden presentarse bajo la forma de componentes separados, o bien bajo la forma de componentes del tipo sistemas micro-electromecánicos, denominados comúnmente con el acrónimo de “MEMS” que corresponde la terminología anglosajona “Micro-Electro-Mechanical Systems”, es decir micromecanizados, por ejemplo de manera colectiva con otros componentes o circuitos.
Un actuador del tipo PSJA se puede activar periódicamente con una cierta frecuencia con el objetivo de emular un generador de vórtex mecánico. El aire sale y entonces entra desde el actuador de tipo PSJA de manera alternativa, lo que perturba el flujo de aire en su proximidad, permitiendo reducir el flujo de la capa límite. Se pueden citar igualmente los microactuadores de tipo piezoeléctrico, montados en baterías, repartidos sobre la superficie del ala, capaces de engendrar a petición una deformación de la superficie de ésta.
Se pueden citar igualmente unos microactuadores a base de micromotores del tipo MEMS, o incluso unos actuadores de aleaciones con memoria de forma, o del tipo músculos artificiales.
Se ha de observar que el sistema puede comprender una pluralidad de equipos de uno de los tipos antes citados, incluso igualmente una pluralidad heterogénea de captadores de diferentes tipos.
Es deseable, por ejemplo para un ala que comprenda una pluralidad de microactuadores de los tipos antes citados, que pueda detectarse el fallo parcial o total de cada uno de los actuadores. En efecto, el fallo de un único actuador puede tener unas consecuencias fatales en relación con el flujo aerodinámico alrededor de toda la superficie del ala, un efecto de contaminación que puede extender rápidamente un flujo turbulento inicialmente localizado, a la totalidad de la superficie del ala.
Es posible adjuntar a cada microactuador, un dispositivo de supervisión integrado que mida directamente el buen funcionamiento del actuador. Sin embargo, una solución de ese tipo se puede comprobar que es penalizadora en la práctica, porque:
1) supone una complejidad de los microactuadores; 2) una complejidad de este tipo, implica particularmente un coste excesivo de la función de supervisión, con relación al coste del microsistema con el que está relacionado; 3) la adición de un dispositivo de supervisión integrado puede ser penalizadora en términos de volumen,
ofreciendo el dispositivo de supervisión necesariamente un volumen significativo; 4) de la misma manera, la adición de un dispositivo de supervisión a cada microactuador tiene como consecuencia una masa más elevada, penalizadora con relación a unos rendimientos en vuelo de la aeronave; 5) es necesario que cada dispositivo de supervisión se alimente con energía; 6) en cualquier caso, es necesario implementar unas conexiones convertidas en más complejas, con el fin de unir eléctricamente y funcionalmente cada dispositivo de supervisión al microactuador asociado, así como los sistemas de ese modo constituidos, con un dispositivo centralizado de gestión; 7) cada dispositivo de supervisión presenta por sí mismo una susceptibilidad con relación al entorno; 8) la calidad de la cobertura del ensayo mediante dicho dispositivo de supervisión integrado es limitada en el caso general, siendo supervisados solamente ciertos órganos del actuador, en vez del desarrollo efectivo de su acción por sus consecuencias físicas.
El documento US 5 493 390 describe un sistema que permite supervisar y diagnosticar unos componentes o estructuras gracias a una red de captadores unidos por fibra óptica.
Un objetivo de la presente invención es paliar al menos los inconvenientes antes citados, proponiendo un dispositivo de supervisión que permita diagnosticar el buen funcionamiento de una pluralidad de equipos tales como unos actuadores, siendo el dispositivo de supervisión a la vez simple y poco exigente con relación a la masa del sistema en el que se implementa.
Una ventaja de la invención es que el dispositivo de supervisión es común a una pluralidad de equipos, pudiendo asimismo estos equipos ser del mismo tipo, o bien de tipos heterogéneos.
Otra ventaja de la invención es que el dispositivo de supervisión no añade ninguna limitación de no robustez con relación al entorno térmico, mecánico y eléctrico del sistema en el que se implementa.
Otra ventaja más de la invención es que el dispositivo de supervisión ofrece una penalidad nula en cuanto a fiabilidad con relación al sistema en el que se implementa.
Otra ventaja de la invención reside en el hecho de que el dispositivo de supervisión permite asegurar una buena cobertura de los modos de fallo de los microactuadores a los que está asociado.
Con este fin, la invención tiene por objetivo un dispositivo de supervisión de una pluralidad de microactuadores, caracterizado porque comprende una fibra óptica que comprende una pluralidad de captadores, estando cada captador dispuesto en la proximidad de un microactuador, y presentando unas propiedades ópticas que varían en función de al menos un parámetro medioambiental, comprendiendo igualmente el dispositivo de supervisión un dispositivo interrogador para la red de fibra óptica que comprende al menos un emisor y un receptor, y unos medios de tratamiento adecuados para modular la frecuencia de la señal óptica emitida por el emisor de manera que se seleccione el captador en la proximidad de un... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de supervisión (60) de una pluralidad de actuadores (500) , que comprende una fibra óptica (300) que comprende una pluralidad de captadores (301) , estando cada captador (301) dispuesto en la proximidad de un microactuador (500) , y presentando unas propiedades ópticas que varían en función de al menos un parámetro físico, las evoluciones del parámetro físico durante el funcionamiento del microactuador (500) definen su firma, comprendiendo igualmente el dispositivo de supervisión (60) un dispositivo interrogador (62) para red de fibra óptica conectado a la fibra óptica (300) y comprendiendo al menos un emisor y un receptor, y unos medios de tratamiento (63) adecuados para modular la frecuencia de la señal óptica emitida por el emisor de manera que se seleccione el captador (301) en la proximidad de un microactuador (500) dado, y caracterizado porque los medios de tratamiento son adecuados para comparar la señal óptica recibida, representativa de la firma del microactuador (500) , con una firma característica del buen funcionamiento del microactuador (500) .
2. Dispositivo de supervisión (60) de acuerdo con la reivindicación 1, caracterizado porque la fibra óptica (300) es del tipo monomodo, y los captadores (301) están constituidos por una red de captadores de fibra óptica que utilizan una redes de interferencia de Bragg, comparando, los medios de tratamiento (63) , la señal óptica recibida con una firma térmica del microactuador (500) .
3. Dispositivo de supervisión (60) de acuerdo con la reivindicación 1, caracterizado porque la fibra óptica (300) es del tipo monomodo, y los captadores (301) están formados por una red de Bragg, comparando, los medios de tratamiento (63) , la señal óptica recibida con una firma de presión del microactuador (500) .
4. Dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque los microactuadores son unos microactuadores de chorro sintético por plasma (100, 500) .
5. Dispositivo de supervisión (60) de acuerdo con la reivindicación 4, caracterizado porque los microactuadores de chorro sintético por plasma (100, 500) comprenden dos electrodos planos (503, 505) realizados por ambos lados, de un sustrato dieléctrico (501) .
6. Dispositivo de supervisión (60) de acuerdo con la reivindicación 5, caracterizado porque la fibra óptica (300) está dispuesta en la estructura del sustrato dieléctrico (501) .
7. Dispositivo de supervisión (60) de acuerdo con la reivindicación 5, caracterizado porque la fibra óptica (300) está realizada en una cavidad formada en el sustrato dieléctrico, estando realizado el captador (301) mediante unas capas depositadas de manera que forman las franjas de una red de interferencia.
8. Dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizado porque los microactuadores (500) son unos actuadores de tipo piezoeléctrico.
9. Dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizado porque los microactuadores (500) son unos micromotores.
10. Dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizado porque los microactuadores (500) son unos actuadores de aleación con memoria de forma.
11. Dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizado porque los microactuadores (500) son unos actuadores de tipo músculo artificial.
12. Dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizado porque los microactuadores (500) forman una población heterogénea de actuadores de diferentes tipos entre los tipos siguientes: microactuadores de chorro sintético por plasma, actuadores piezoeléctricos, micromotores, actuadores de aleación con memoria de forma, músculos artificiales.
13. Dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque comprende unos medios de sincronización (63) del análisis comparativo de las señales con las órdenes de accionamiento de los microactuadores (500) .
14. Ala de aeronave, caracterizada porque un dispositivo de supervisión (60) de acuerdo con una cualquiera de las reivindicaciones precedentes supervisa una pluralidad de actuadores dispuestos en la superficie del ala, estando dispuestos los captadores (301) a lo largo de la fibra óptica (300) dispuesta en la materia del ala, estando dispuesto cada uno de los captadores en la proximidad de un actuador.
Patentes similares o relacionadas:
Módulo esclavo para monitorear un sistema eléctrico, del 9 de Octubre de 2019, de LSIS Co., Ltd: Un módulo esclavo para monitorear un sistema eléctrico, el módulo esclavo transmite datos a un módulo maestro mediante un bus serie , […]
Montaje de control eficiente y procedimiento de control, del 2 de Octubre de 2019, de INOVA SEMICONDUCTORS GMBH: Un montaje de control (A) que comprende unidades de control conectadas en serie (SE), que controlan diodos emisores de luz, donde cada una de las unidades […]
Segmento de estator para un sistema de transporte de motor lineal y sistema de transporte, del 11 de Septiembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Segmento de estator diseñado para un sistema de transporte de motor lineal para alojar al menos un rotor de transporte (T1), que comprende - un agente para […]
Dispositivo de control de un armario eléctrico, del 19 de Junio de 2019, de RITTAL GMBH & CO. KG: Una disposición para monitorear un armario, que comprende un dispositivo de control que está conectado a través de un bus de campo a varios sensores y/o actuadores para […]
Red de transmisión y comunicación de tramas, del 12 de Junio de 2019, de ABB SCHWEIZ AG: Un método para transmitir tramas en una red de comunicación que interconecta una pluralidad de nodos sincronizados , en donde los nodos transmiten periódicamente […]
Sistema de transmisión y recepción de datos, del 10 de Abril de 2019, de LSIS Co., Ltd: Un sistema de comunicación que comprende: módulos esclavos configurados para enviar una señal de respuesta correspondiente a una señal […]
Método de transmisión y recepción de datos, sistema de transmisión y recepción de datos, dispositivo maestro y dispositivo esclavo, del 6 de Marzo de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un método de transmisión y recepción de datos en el que se proporcionan un dispositivo maestro y múltiples dispositivos esclavos (102, 103, 104, 501, […]
Unidad de procesamiento de mensajes de un sistema PLC, del 6 de Febrero de 2019, de LSIS Co., Ltd: Una unidad de procesamiento de mensajes de un sistema PLC que incluye un patrón y una pluralidad de esclavos, la unidad de procesamiento de mensajes se proporciona a […]