Dispositivo y método para la adquisición y reconstrucción de objetos.
Es objeto de esta invención un dispositivo y un método que permite la adquisición y posterior reconstrucción de objetos con volumen en toda la superficie exterior.
Caracteriza la presente invención un particular modo de adquisición sobre el objeto en caída libre de tal modo que no existe una superficie de apoyo que impida la adquisición de la superficie que quedaría oculta por dicho apoyo. Igualmente caracterizan especiales modos de distribución de las cámaras que optimizan la captura de imágenes y aportan información útil en la reconstrucción posterior del volumen por medios informáticos.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2009/070571.
Solicitante: Instituto Tecnológico de Informática.
Nacionalidad solicitante: España.
Inventor/es: PÉREZ CORTES,JUAN CARLOS, SÁEZ BARONA,SERGIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/245 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › que utilizan una pluralidad de transductores fijos que funcionan simultáneamente (G01B 11/255 tiene prioridad).
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
PDF original: ES-2460952_T3.pdf
Fragmento de la descripción:
Dispositivo y método para la adquisición y reconstrucción de objetos Objeto de la invención El objetivo de esta invención es un dispositivo y un método que permitirán la adquisición y posterior reconstrucción de objetos con volumen en toda su superficie exterior. Esta invención está caracterizada porque tiene un particular modo de adquisición sobre el objeto en caída libre de tal modo que no existe una superficie de apoyo que impida la adquisición de la superficie al ocultarla.
Igualmente está caracterizada por especiales modos de distribución de las cámaras que optimizan la captura de imágenes y aportan información útil en la reconstrucción posterior del volumen por medios informáticos.
Antecedentes de la invención La adquisición de datos de objetos con volumen que permite su reconstrucción posterior con medios informáticos es una línea de investigación activa debido a su interés y múltiples aplicaciones.
La adquisición y reconstrucción de imágenes en tres dimensiones es una tarea ampliamente abordada en el área de “visión por computador”. Las metodologías empleadas son diversas, como por ejemplo las basadas en luz estructurada o en estereoscopía multi-vista, entre las que pueden distinguirse las identificadas a través de los términos en inglés “Shape from Silohuettes” o “Shape from Voxel Occupancy” y las basadas en “Shape from Photo-Consistency”. Las primeras tienen como límite la reconstrucción de la “corteza visual” o “visual hull” de los objetos analizados y las segundas pueden ir más allá, pero dependen de la existencia de puntos característicos discernibles en los objetos.
En cuanto a la aplicación a la que se destina la invención, el control y la inspección de objetos para verificar su forma tridimensional y sus medidas volumétricas, así como la imagen de su superficie, es un área importante en el ámbito de la “Visión Industrial”.
La práctica totalidad de las aplicaciones y soluciones existentes se centran en la reconstrucción de una parte del objeto a inspeccionar y no de su totalidad, ya que el mismo suele estar apoyado sobre una cinta transportadora que sólo facilita ver una cara del mismo. En este caso, el movimiento del objeto frente a una cámara y el uso de luz estructurada (típicamente una línea de luz láser) permiten realizar un barrido longitudinal del mismo, obteniéndose así una serie de perfiles en altura que proporcionarán la reconstrucción del objeto. Podríamos llamar a esta reconstrucción “2D y 1/2”, para distinguirla de la reconstrucción 3D del objeto completo que proporciona la presente invención.
El documento WO 2005/022076 describe la medición óptica de objetos en caída libre.
Descripción de la invención La presente invención consiste en un dispositivo según la reivindicación 1 para la adquisición y reconstrucción de objetos con volumen. Este dispositivo dispone de:
• Un conjunto de sensores de captura de imagen para la adquisición del objeto con volumen a ser analizado.
Estos sensores son los que obtienen las imágenes del objeto desde distintos puntos aportando información sobre la forma del objeto visto desde su ubicación;
• Un equipo informático para la reconstrucción del volumen y la superficie completa del objeto a partir de las imágenes adquiridas mediante los sensores de captura de imagen.
Los algoritmos y medios de reconstrucción del objeto a través de las imágenes obtenidas por los sensores de captura de imagen pueden ser cualquiera de los conocidos en la técnica, ya que el problema técnico a resolver por la invención se resuelve por el modo de disponer las cámaras y el objeto en el espacio para que el objeto sea accesible en todo su contorno exterior;
• Adicionalmente, dispone de una superficie en la que se distribuyen los sensores de captura de imagen, donde esta superficie limita un volumen en su interior destinado a recibir el objeto a ser analizado y donde los sensores están orientados con sus ejes ópticos hacia el volumen interior de la superficie; disponiendo esta superficie adicionalmente de una abertura de entrada y una abertura de salida tal que permiten el paso, por el interior de la superficie, del objeto a ser analizado en un movimiento de caída libre.
La superficie a lo largo de la cual se distribuyen los sensores de captura de imagen no es necesariamente una superficie cerrada e incluso puede estar definida mediante puntos discretos que definen la situación en el espacio de los sensores de captura de imagen; y éstos están conectados estructuralmente únicamente mediante varillas u otros elementos ligeros.
El logro más importante es que los sensores establecen un volumen interior a través del cual es posible el paso del objeto a analizar. El paso se lleva a cabo por la caída libre del objeto tras su entrada en el volumen a través de la abertura de entrada; y una vez atravesado el interior del volumen, el objeto sale por la abertura de salida.
Las aberturas de entrada y de salida pueden ser la misma, basta con que el objeto sea por ejemplo disparado hacia el interior del volumen y que posteriormente en su caída vuelva a salir por la misma abertura, tal y como se describe en la reivindicación 7.
Es el paso por el interior del volumen lo que permite que el objeto muestre toda su superficie externa para ser accesible visualmente y poder ser identificada.
El sistema está destinado a obtener una reconstrucción tridimensional de un objeto en el aire, en caída libre u otra trayectoria facilitada por una actuación mecánica sobre el mismo, a través de un espacio abierto en el interior del dispositivo específicamente destinado a este fin.
La presencia del objeto dispara la captura simultánea de un cierto número de imágenes desde un conjunto de cámaras o sensores de imagen situados en una disposición optimizada para la posterior reconstrucción del volumen del objeto. El objeto puede atravesar el espacio de captura abandonado en caída libre desde arriba por una cinta transportadora o ser impulsado o situado en el mismo mediante un actuador mecánico, eléctrico, neumático, etc., desde cualquier posición inicial, de forma que en el momento del disparo el objeto sea visible desde todos los ángulos posibles sin que ningún elemento en contacto con el mismo interrumpa su visibilidad. Este modo de proceder determina un procedimiento de adquisición y reconstrucción de objetos con volumen de acuerdo a la reivindicación 8.
Las diversas realizaciones de la invención se definen por las reivindicaciones dependientes 2 a 7.
Descripción de los dibujos Se complementa la presente memoria descriptiva, con un juego de planos, ilustrativos de un ejemplo preferido de la invención, pero que en modo alguno es limitativo.
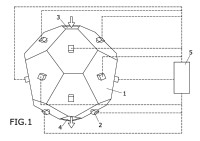
La figura 1 muestra una vista en perspectiva de un dispositivo según un modo de realización de la invención en el que se muestra un modo de configurar una superficie con aberturas de entrada y de salida del objeto a analizar así como la disposición de los sensores de captura de la imagen.
Exposición detallada de la invención En la descripción de la invención se han llevado a cabo los elementos esenciales de dicha invención, en particular tal y como se muestra en un ejemplo de realización tal y como se muestra en la figura 1.
Analizaremos primero aspectos teóricos y posteriormente describiremos el modo práctico de llevar a cabo el dispositivo haciendo uso de dichos aspectos teóricos.
Una geometría adecuada para establecer la configuración de la superficie sobre la que se distribuyen los sensores (2) de captura de imagen en el dispositivo del ejemplo de realización es una esfera con centro en un punto. Los sensores (2) de captura de imagen estarán uniformemente distribuidos en la superficie de la esfera de acuerdo a un criterio de uniformidad, como por ejemplo el que establece que la energía potencial de un hipotético sistema compuesto de partículas con carga eléctrica distribuidas en los puntos de la superficie sea mínima. Bajo este modelo, los puntos se calculan por minimización de un funcional.
Pueden aplicarse otros criterios de uniformidad, no necesariamente haciendo uso de la distancia euclídea.
La minimización del criterio planteado es sencilla y puede realizarse por simulación y usando algoritmos de descenso o pueden usarse medios más eficientes como el de gradiente conjugado o GMRES (“Generalized Minimal Residual Method”) .
Una vez definidos los puntos, en cada uno de ellos se sitúa una cámara o sensor (2) de imagen de modo que su eje óptico sea un radio de la esfera y apunte... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para la adquisición y reconstrucción de objetos con volumen que dispone de:
• un conjunto de sensores de captura de imagen (2) para la adquisición de imágenes del objeto con volumen a ser analizado adaptados para capturar simultáneamente una imagen del objeto,
• un equipo informático (5) para la reconstrucción del volumen y la superficie completa del objeto a partir de las imágenes adquiridas mediante los sensores de captura de imagen (2) ,
caracterizado por que dispone de una superficie en la que los sensores de captura de imagen (2) están distribuidos en el espacio de tal modo que se encuentran situados en un lugar geométrico esférico y con sus ejes ópticos esencialmente orientados hacia el centro de la esfera, donde esta superficie limita un volumen en su interior destinado a recibir el objeto a ser analizado y donde los sensores están orientados con sus ejes ópticos hacia el volumen interior de la superficie; disponiendo esta superficie adicionalmente de una abertura de entrada (3) y una abertura de salida (4) tal que permiten el paso, por el interior de la superficie del objeto a ser analizado, en un movimiento de caída libre.
2. Dispositivo según la reivindicación 1 caracterizado por que la distribución espacial de cada uno de los sensores de captura de imagen (2) en la esfera geométrica es coincidente con alguno o todos los puntos, mayor o igual que, que reducen un funcional.
3. Dispositivo según la reivindicación 2 caracterizado por que el número de sensores de captura de imagen (2) y su distribución es tal que no existen dos sensores (2) enfrentados con sus ejes focales contenidos en la misma recta.
4. Dispositivo según la reivindicación 2 caracterizado por que ninguno de los sensores de captura de imagen (2) tiene a otro sensor (2) en su ángulo de visión.
5. Dispositivo según cualquiera de las reivindicaciones 1 a 4 caracterizado por que la superficie es poliédrica con caras (1) de tal modo que:
• cada una de las caras del poliedro dispone de un sensor de captura de imagen (2) ; y,
• además la misma cara (1) verifica que hay una disposición espacial tal que el plano principal que define la superficie de la cara es tangente a la esfera que establece el lugar geométrico en el que se sitúa el sensor de captura de imagen (2) asociado a dicha cara (1) ; y,
• ninguna de las caras (1) es paralela a otra.
6. Dispositivo según cualquiera de las reivindicaciones anteriores caracterizado por que dispone de un sensor
(2) que determina el momento de disparo simultáneo de los sensores de captura de imagen (2) para su posterior tratamiento cuando el objeto a analizar se encuentra en una determinada región del volumen interior a la superficie.
7. Dispositivo según cualquiera de las reivindicaciones anteriores caracterizado por que las aberturas de entrada (3) coinciden con la abertura de salida (4) .
8. Procedimiento para la adquisición y reconstrucción de objetos con volumen caracterizado por que:
• se provee de un dispositivo según cualquiera de las reivindicaciones 1 a 6,
• se provoca la caída del objeto a ser analizado de tal modo que éste entra por la abertura de entrada (3) , atraviesa el interior de la superficie donde se sitúan los sensores de captura de imagen (2) y sale por la abertura de salida (4) ; y,
• se provoca un disparo de los sensores de captura de imagen (2) generando imágenes que son enviadas al equipo informático (5) para la reconstrucción del volumen y la superficie completa del objeto a partir de dichas imágenes.
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]