DISPOSITIVO PARA MEDIR EL DESPLAZAMIENTO DE UN OBJETO MOVIL CON RESPECTO A UN SISTEMA DE REFERENCIA FIJO.
Dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo.
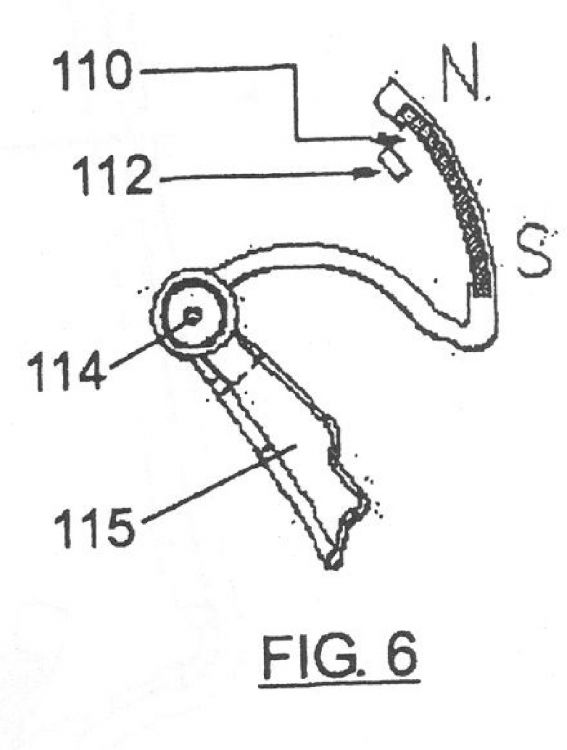
El objeto móvil incorpora al menos un imán permanente (110), y el sistema de referencia fijo dispone al menos de un sensor de campo magnético (112) que traduce el desplazamiento del objeto móvil a una señal eléctrica. La distancia mínima entre el imán (110) y el sensor de campo magnético (112) es constante al efectuarse el desplazamiento del objeto móvil. El imán (110) tiene preferiblemente forma de arco de circunferencia. Aplicable para controles manuales de coches de spot, siendo el gatillo (115) en ese caso el objeto móvil
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200800191.
Solicitante: GALILEO ENGINEERING S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA CAVALLOTI 16, REGGIO EMILIA-42100 ITALIA ITALIA.
Inventor/es: GIBERTONI,MAURIZIO, ANCESCHI,CHRISTIAN.
Fecha de Solicitud: 17 de Julio de 2007.
Fecha de Publicación: .
Fecha de Concesión: 4 de Enero de 2011.
Clasificación Internacional de Patentes:
- A63H30/02 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 30/00 Dispositivos de control a distancia especialmente adaptados para los juguetes, p. ej. para vehículos (mecanismos de dirección de control a distancia para vehículos de juguete A63H 17/385; para ferrocarriles en modelos reducidos A63H 19/24, A63H 19/28). › Dispositivos eléctricos.
- G01D5/14B1
Clasificación PCT:
- A63H30/02 A63H 30/00 […] › Dispositivos eléctricos.
- G01D5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
Fragmento de la descripción:
Dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo.
Campo de la invención
La presente invención se engloba dentro del campo de medidores de desplazamiento lineal y/o angular de un objeto móvil con respecto a un objeto fijo, utilizando imanes y sensores de campo magnético. Es de particular aplicación en los dispositivos de guiado de coches destinados a pistas eléctricas (llamados "coches de slot").
Antecedentes de la invención
Actualmente se conocen sensores de desplazamiento que pueden detectar el desplazamiento lineal de un primer objeto con respecto a un segundo, o el movimiento angular de un objeto con respecto a otro, que comprenden imanes permanentes y sensores de intensidad de campo magnético dotados de una salida eléctrica.
El inconveniente que presentan estos sistemas de medición es que la señal eléctrica de salida no está relacionada de manera lineal al desplazamiento relativo de los objetos, sino se trata de una relación de tipo cuadrático.
En los sistemas de medición de posición o de medición de ángulo, es de particular importancia obtener una señal de salida relacionada de manera proporcional al ángulo o a la distancia que ha de detectarse. Si esto no sucede se está obligado, en casi la totalidad de los casos, a efectuar complicados procesamientos numéricos, muchas veces efectuados a través de un microprocesador, que permiten obtener una linearización de la curva de salida del sensor.
La presente invención permite superar este límite posicionando de manera adecuada el sensor magnético y el imán, para obtener una relación lineal entre la señal eléctrica de salida y los desplazamientos relativos entre los objetos.
Descripción de la invención
La invención se refiere a un dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo de acuerdo con la reivindicación 1 y a un control manual para coches de slot, de acuerdo con la reivindicación 7, que incorpora dicho dispositivo. Realizaciones preferidas del dispositivo y del control manual se definen en las reivindicaciones dependientes.
El objeto de la presente invención es un dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo. El dispositivo comprende el propio objeto móvil y el objeto, o sistema de referencia, fijo. El objeto móvil incorpora a su vez al menos un imán permanente solidario, mientras que el sistema de referencia fijo dispone al menos un sensor de campo magnético encargado de traducir el desplazamiento del objeto móvil a una señal eléctrica. El dispositivo está diseñado de forma que la distancia mínima entre el al menos un imán y el al menos un sensor de campo magnético es constante al efectuarse el desplazamiento del objeto móvil.
El desplazamiento del objeto móvil puede ser lineal o angular. En el primer caso la magnitud medida es el propio desplazamiento lineal del objeto móvil y el eje de polarización del imán, o imanes, es paralelo a la dirección de movimiento del objeto móvil. En el segundo caso, el objeto móvil rota en torno a un centro de rotación, siendo el desplazamiento angular la magnitud medida. En este caso el imán tiene forma de arco de circunferencia, con el sentido de polarización magnética del imán según el propio arco de circunferencia. El al menos un sensor de campo magnético puede comprender al menos un sensor de efecto Hall de salida lineal.
En una realización preferida, para el caso de que el dispositivo mida desplazamientos angulares, el objeto móvil puede ser el gatillo de un control manual de coches de slot. En este caso, el dispositivo puede incorporar un muelle a través del cual el gatillo se mantiene en posición fija en condiciones de reposo.
Es objeto también de la presente invención un control manual para coches de slot que incorpora un dispositivo para medir el desplazamiento angular de un objeto móvil con respecto a un sistema de referencia fijo según se ha descrito.
Breve descripción de los dibujos
A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
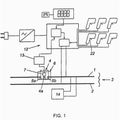
La Figura 1 muestra, según el Estado de la Técnica, una manera de realización de desplazamiento relativo utilizando imanes.
La Figura 2 muestra, según el Estado de la Técnica, la relación entre la tensión de salida y la distancia entre imán y sensor (y por tanto, desplazamiento lineal) en la realización de la Figura 1.
La Figura 3 muestra una realización particular de la invención para la medición de desplazamientos lineales de un objeto.
La Figura 4 muestra la relación entre la tensión de salida y el desplazamiento lineal de un objeto en la realización de la Figura 3.
La Figura 5 muestra una realización particular de la presente invención para la medición de desplazamientos angulares de un objeto.
La Figura 6 muestra una realización particular de la presente invención destinada a utilizarse en el guiado de los coches de slot sobre de tracción eléctrica, por medio de la pulsación de un gatillo.
La Figura 7 muestra una realización particular de la presente invención de forma similar a la Figura 6, pero con los polos del imán invertidos.
La Figura 8 muestra el movimiento de los distintos elementos de la realización particular de la figura 6 cuando se presiona el gatillo.
La Figura 9 muestra una realización de un pulsador electrónico para coches de slot que lleva incorporado el dispositivo de medición de desplazamiento angular de la Figura 6.
Descripción de una realización preferida de la invención
En la Figura 1 se muestra una realización típica según el Estado de la Técnica de los sensores de desplazamiento por imanes. En estos sensores de desplazamiento el imán 100 está fijado de manera solidaria al objeto 101 en movimiento y el sensor de campo magnético, constituido por un sensor de efecto Hall 102, resulta solidario al sistema 103 de referencia fijo.
En un sistema de detección de este tipo se varía la distancia X de uno de los dos polos del imán 100 con respecto a la cara sensible del sensor de efecto Hall 102, la dirección del movimiento del objeto 101 está alineada con el eje del imán 100 y también es coincidente con el eje del sensor de efecto Hall 102. En este caso se varía la distancia mínima entre sensor e imán al variar la distancia X que ha de detectarse. La señal V de salida que se obtiene del sensor 102 resulta dependiente de la distancia X del objeto 101 con respecto al sistema 103 de referencia fijo; cuanto menor sea la distancia X, mayor será la señal V eléctrica.
Tal como se muestra en la Figura 2, la señal eléctrica de salida V no está relacionada de manera lineal al desplazamiento X. La señal de salida que se obtiene está relacionada de manera más que proporcional a la disminución de la distancia X y la señal V de salida que se obtiene es de tipo cuadrático con la disminución de X.
En la Figura 3 se representa una disposición del imán 100 y del sensor 102 de acuerdo a una realización particular de la invención, cuando el desplazamiento del objeto es lineal. La posición del sensor 102 es una peculiaridad de la aplicación. El sensor 102, de hecho, no está dirigido frontalmente hacia uno de los polos magnéticos, sino que normalmente está posicionado en la superficie lateral del imán 100. Por tanto, durante el movimiento del imán 100, el sensor ve desplazarse frente a él el imán 100 de un polo al otro. La intensidad del campo magnético máxima, para una polaridad, disminuirá hasta la mitad de la longitud del imán y empezará a aumentar, con polaridad opuesta, hasta alcanzar el máximo en el otro extremo. La señal eléctrica que sale del sensor 102 varía por tanto de manera lineal durante el movimiento, de un valor mínimo, correspondiente a un polo magnético, a un valor máximo, correspondiente al polo opuesto. La peculiaridad de este sistema es que la distancia del sensor 102 al imán 100 es constante al variar la magnitud de medición X y la dirección del desplazamiento X es paralela al eje del imán norte-sur.
La longitud del imán 100 determina el recorrido del movimiento que se quiere detectar. La señal...
Reivindicaciones:
1. Dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo, incorporando el objeto móvil (101, 111) al menos un imán permanente (100,110), y disponiendo el sistema de referencia fijo (103, 113) al menos un sensor de campo magnético (102, 112) que traduce el desplazamiento del objeto móvil (101, 111) a una señal eléctrica, caracterizado porque la distancia mínima entre el al menos un imán (100, 110) y el al menos un sensor de campo magnético (102, 112) es constante al efectuarse el desplazamiento del objeto móvil (101,111).
2. Dispositivo según la reivindicación 1, en el que el desplazamiento del objeto móvil (101) es lineal, siendo dicho desplazamiento lineal (X) la magnitud medida, caracterizado porque el eje de polarización del al menos un imán (100) es paralelo a la dirección de movimiento.
3. Dispositivo según la reivindicación 1, en el que el desplazamiento del objeto móvil (111) es angular, rotando en torno a un centro de rotación (114), siendo dicho desplazamiento angular (α) la magnitud medida, caracterizado porque el imán (110) tiene forma de arco de circunferencia, siendo el sentido de polarización magnética del imán (110) según el propio arco de circunferencia.
4. Dispositivo según cualquiera de las reivindicaciones anteriores, caracterizado porque el al menos un sensor de campo magnético (102, 112) comprende al menos un sensor de efecto Hall de salida lineal.
5. Dispositivo según cualquiera de las reivindicaciones 3-4, caracterizado porque el objeto móvil es el gatillo (115) de un control manual (117) de coches de slot.
6. Dispositivo según la reivindicación 5, caracterizado porque incorpora un muelle (116) a través del cual el gatillo (115) se mantiene en posición fija en condiciones de reposo.
7. Control manual para coches de slot, caracterizado porque incorpora un dispositivo según cualquiera de las reivindicaciones 3-6.
Patentes similares o relacionadas:
 PROCEDIMIENTO DE IDENTIFICACION, ASIGNACION Y CONTROL PARA VEHICULOS TIPO SLOT, del 23 de Mayo de 2011, de NINCO DESARROLLOS, S.L.: Procedimiento de identificación, asignación y control para vehículos de tipo slot, caracterizado porque: una consola se encarga de enviar unas señales […]
PROCEDIMIENTO DE IDENTIFICACION, ASIGNACION Y CONTROL PARA VEHICULOS TIPO SLOT, del 23 de Mayo de 2011, de NINCO DESARROLLOS, S.L.: Procedimiento de identificación, asignación y control para vehículos de tipo slot, caracterizado porque: una consola se encarga de enviar unas señales […]
 CONTROL DE FUNCIONES ADICIONALES DE VEHÍCULOS DE JUGUETE EN UN SISTEMA DE CONTROL DIGITAL, del 20 de Enero de 2011, de STADLBAUER SPIEL- UND FREIZEITARTIKEL GMBH: Procedimiento para el funcionamiento de un sistema de control digital para una pluralidad de objetos a controlar, en particular para unos automóviles de juguete (10, […]
CONTROL DE FUNCIONES ADICIONALES DE VEHÍCULOS DE JUGUETE EN UN SISTEMA DE CONTROL DIGITAL, del 20 de Enero de 2011, de STADLBAUER SPIEL- UND FREIZEITARTIKEL GMBH: Procedimiento para el funcionamiento de un sistema de control digital para una pluralidad de objetos a controlar, en particular para unos automóviles de juguete (10, […]
 PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN SISTEMA DE CONTROL DIGITAL PARA VARIOS OBJETOS A CONTROLAR, del 22 de Abril de 2010, de STADLBAUER SPIEL- UND FREIZEITARTIKEL GMBH: Procedimiento para el funcionamiento de un sistema de control digital para varios objetos a controlar, especialmente para vehículos de juguetes […]
PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN SISTEMA DE CONTROL DIGITAL PARA VARIOS OBJETOS A CONTROLAR, del 22 de Abril de 2010, de STADLBAUER SPIEL- UND FREIZEITARTIKEL GMBH: Procedimiento para el funcionamiento de un sistema de control digital para varios objetos a controlar, especialmente para vehículos de juguetes […]
 SISTEMA DE LOCALIZACION EN PISTAS DE VEHICULOS ELECTRICOS A ESCALA DE CONTROL DIGITAL, del 16 de Octubre de 2008, de NINCO DESARROLLOS, S.L.: Sistema de localización en pistas de vehículos eléctricos a escala de control digital.#La presente invención se refiere a un sistema de localización […]
SISTEMA DE LOCALIZACION EN PISTAS DE VEHICULOS ELECTRICOS A ESCALA DE CONTROL DIGITAL, del 16 de Octubre de 2008, de NINCO DESARROLLOS, S.L.: Sistema de localización en pistas de vehículos eléctricos a escala de control digital.#La presente invención se refiere a un sistema de localización […]
MANDO PARA PISTAS DE VEHICULOS DE JUGUETE., del 1 de Octubre de 1999, de NINCO DESARROLLOS, S.L.: 1. MANDO PARA PISTAS DE VEHICULOS DE JUGUETE, QUE TENIENDO POR FINALIDAD CONTROLAR EL PASO DE CORRIENTE DESDE LOS DISPOSITIVOS DE ALIMENTACION A LAS […]
MUÑECOS GEMELOS CON SISTEMA ELECTRONICO DE INFLUENCIA MUTUA., del 16 de Agosto de 1995, de ONILCO INNOVACION, S.A.: MUÑECOS GEMELOS CON SISTEMA ELECTRONICO DE INFLUENCIA MUTUTA, QUE COMPRENDIENDO DOS MUÑECOS DE CUALQUIER NATURALEZA, FORMA Y CARACTERISTICAS, AMBOS INDEPENDIENTES […]
DISPOSITIVO CONVERTIDOR DE DIRECCION PARA UN JUGUETE CONTROLADO A DISTANCIA, del 16 de Marzo de 1994, de NIKKO CO., LTD.: UN DISPOSITIVO CONVERTIDOR DE DIRECCION PARA UN JUGUETE CONTROLADO A DISTANCIA ES DESCUBIERTO EN DONDE UN EJE DEL ROTOR ES SOPORTADO ENTRE LAS CARAS DE CONTACTO […]
 DISPOSITIVO ELECTROMOTRIZ PARA VEHICULOS DE JUGUETE, del 1 de Diciembre de 1973, de LUNA TORRES Y SENABRE IRLES,LUIS: Dispositivo electromotriz para vehículos de juguete, caracterizado esencialmente porque está constituido por un altavoz o micrófono acoplado a un amplificador convencional […]
DISPOSITIVO ELECTROMOTRIZ PARA VEHICULOS DE JUGUETE, del 1 de Diciembre de 1973, de LUNA TORRES Y SENABRE IRLES,LUIS: Dispositivo electromotriz para vehículos de juguete, caracterizado esencialmente porque está constituido por un altavoz o micrófono acoplado a un amplificador convencional […]