DISPOSITIVO DE DESPLAZAMIENTO LATERAL AUTOMÁTICO CONTROLADO POR GPS PARA EL CONTROL DE MALA HIERBA EN CULTIVOS EN LÍNEA.
El objeto de la presente invención plantea una estrategia sostenible en el control de la mala hierba mediante un desplazador lateral automático controlado por GPS-RTK con precisiones centimétricas.
Esta precisión permite eliminar la mala hierba de forma mecánica en las proximidades del cultivo y de esta forma reducir la aplicación química en los cultivos en líneas (algodón, remolacha, tomate, etc.). La invención se encuadra en la agricultura de precisión e ingeniería de los recursos naturales.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201101306.
Solicitante: UNIVERSIDAD DE SEVILLA.
Nacionalidad solicitante: España.
Inventor/es: PÉREZ RUIZ,Manuel, CARBALLIDO DEL REY,Jacob.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01B69/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › Dirección de máquinas o instrumentos agrícolas; Guía de máquinas o instrumentos agrícolas según un recorrido determinado.
- G05D3/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18).
Fragmento de la descripción:
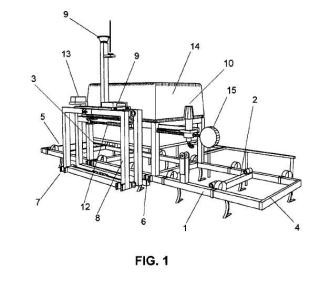
Dispositivo de desplazamiento lateral automático controlado por GPS para el control de mala hierba en cultivos en línea.
Objeto de la invención El objeto de la presente invención se plantea como una solución al problema técnico de reducir sensiblemente la aplicación química en el control de la mala hierba en cultivos de línea. La solución a dicho problema técnico se obtiene mediante un dispositivo que permite combinar, en el control de mala hierba, la escarda mecánica (entre línea de cultivo) y química (en línea de cultivo) usando la información recibida por un sistema de posicionamiento, preferentemente un equipo RTK-GPS, instalado en el mismo apero. El dispositivo se desplazara lateralmente a través de un cilindro hidráulico en tiempo real, permitiendo la aproximación de los elementos de escarda mecánica a 5 cm de la línea de cultivo o semilla. Para arrastrar el dispositivo durante la aplicación se puede emplear un tractor o cualquier otro vehículo autopropulsado adecuado a suelos no preparados para el tránsito. La utilización del presente dispositivo permite un ahorro de hasta un 50% en comparación con las aplicaciones de herbicidas que se hacen actualmente, suponiendo pues una solución efectiva al problema técnico referido.
Estado de la técnica En la última década, se han logrado importantes avances en ordenadores instrumentación y sensores que han permitido el inicio de la automatización e incorporación de las nuevas tecnologías en muchas operaciones agrícolas (Bak y Jocobsen, 2004; Griepentrog et al., 2004; Kise et al., 2005) . El uso de estas nuevas tecnologías viene motivada fundamentalmente por dos factores: consumidores y gobiernos demanda una reducción en la aplicación de agroquímicos y conseguir la competitividad en muchos cultivos reduciendo los costes de producción.
El control de la mala hierba en la producción agrícola en España se basa en el uso de desinfectantes de suelo, pases de cultivador entre líneas del cultivo hasta que el desarrollo vegetativo lo permite, y tratamientos herbicidas (al menos tres, frecuentemente uno a la semana) . Un adecuado manejo localizado de estas operaciones permitirá a los productores una reducción del uso de herbicidas y una optimización en el uso de operaciones mecánicas, consiguiendo de esta forma la sostenibilidad y la reducción de la presencia de residuos en la alimentación humana.
Actualmente, el sector agrícola español usa herbicidas selectivos y no selectivos y, aunque para muchos cultivos existen herbicidas selectivos, en la sociedad sigue existiendo una gran preocupación por la aplicación de productos químicos sintéticos. Gerhards y Christensen (2006) indican que las prácticas de escarda mecanizada se han reducido en las últimas décadas, sin embargo, el uso de herbicida no ha eliminado los problemas de mala hierba en la agricultura. Usando algunas áreas de las disciplinas de la automatización y rObotización, se puede conseguir una mayor reducción de insumos e incluso en algunos casos se pueden llegar a eliminar por completo los tratamientos herbicidas (Pérez y Agüera, 2009) .
La escarda mecanizada en general, elimina de forma óptima la mala hierba que crece entre líneas de cultivo, pero no elimina la que crece dentro de la linea de cultivo durante el período cuando la competencia por nutrientes, agua y radiación solar es crítica entre mala hierba y cultivo (Slaughter et al., 2008) . Este hecho lleva a la necesidad de tener que eliminar la mala hierba de la línea del cultivo con escarda manual (Tillet, et al., 2008) , aplicación en bandas de herbicidas en la línea de cultivo (Kaya y Buzluk, 2006) o, en el peor de los casos, aplicaciones de herbicidas uniformes en todo el cultivo (forma habitual de operar de los productores en España) .
La reducción del uso de productos fitosanitarios y fertilizantes es una preocupación de las diferentes administraciones. Actualmente los reglamentos y directivas (Directiva 91/141/CEE) sobre comercialización y uso de los productos fitosanitarios están en continua revisión por parte de la Unión Europea y sus objetivos son principalmente: aumentar la seguridad en salud humana y medio ambiente y armonizar la autorización y comercialización de productos fitosanitarios. Así, la Comunicación de la Comisión Europea "Hacia una estrategia temática para el uso sostenible de plaguicidas", sienta las bases para conseguir una utilización más sostenible de los plaguicidas, garantizando, al mismo tiempo, la protección necesaria de las cosechas. Por otro lado, la Directiva 91/676/CEE del Consejo Europeo, tiene por objeto proteger las aguas comunitarias contra nitratos de origen agrario, que son la principal causa de la contaminación desde fuentes difusas. En esta Directiva se insta a los Gobiernos de los diferentes Estados miembros a limitar la aplicación de abonos nitrogenados.
En este sentido, las actuales técnicas de agricultura de precisión permiten el uso de un conjunto de herramientas con el doble objetivo de conseguir, por un lado, un conocimiento más preciso de las condiciones en las que se desarrolla el cultivo, permitiendo así la toma de decisiones con un mejor criterio, y por otro lado, la ejecución de dichas decisiones. La consecución de estos dos objetívos tiene como consecuencias directas un manejo sostenible del sistema, más respetuoso con el medio ambiente, y una mejor economía, a través de la optímización de las diferentes labores (Berr y et al., 2003; Kitchen et al., 2005) .
Actualmente existe en el mercado una gran varíedad de dispositivos que permiten poner en práctica técnicas y procedimientos de agricultura de precisión, sin embargo su difusión entre nuestros agricultores y empresas de servicios aún no está al nivel de otros países europeos como Alemania, Francia, Reino Unido o Dinamarca. Por otra parte, la adopción de estas técnicas requiere de ensayos previos y adaptaciones a nuestras formas de trabajo, maquinaria y cultivos que hace aún más difícil su adopción, teniendo en cuenta además su todavía elevado coste.
Lee et al. (1999) diseñaron un equipo de control de mala hierba basado en la aplicación selectiva a través de sistemas de visión muy precisos. Con el sistema de visión se consigue hacer la diferenciación de zona con mala hierba y zona de cultivo, eliminando sólo las malas hierbas. El equipo consigue tomar una imagen cada 0, 34 segundos, que posteriormente procesaba representando una región de línea de cultivo de 11, 43 cm x 10, 16 cm, permitiendo así alcanzar una velocidad de trabajo de 1, 20 km/h. Los algoritmos de procesamiento de las imágenes fueron correctamente identificados en tiempo real en términos de un 73, 1 % en tomates y un 68, 8 % de mala hierba respectivamente.
Norremark el al (2003) desarrollaron un equipo para la generación de un mapa de localización de cultivos, derivados de datos geo-referenciados registrados durante la operación de siembra. Para ello se eligió el cultivo de la remolacha azucarera, utilizando una máquina sembradora de precisión, adaptada con sensores ópticos para detectar la dispersión de las semillas en el surco. Además, utilizaron un sistema (RTK-GPS) y un sensor de inclinación del eje de doble indicación: posición global y magnitud de los ángulos de la sembradora. Para todo esto trabajaron con un sistema de adquisición de datos que se configuró para la grabación y almacenamiento de posiciones globales de siembra y la posición real de estas semillas al sembrarse. La validación mostró que el 95% de la remolacha azucarera en plantas sembradas figuraba en las posiciones del mapa geo-espacial elaborado. En general, la precisión global de la estimación en cuanto a georeferenciación de las plantas fue satisfactoria.
Sun el al (2010) estudiaron la viabilidad del uso de la RTK-GPS para la generación de mapas de posición de plantas de tomates, en el momento del transplante. Para ello se utilizó una máquina plantadora con un receptor RTK-GPS, y un controlador, a tiempo real, a bordo de la máquina. Los errores obtenidos en la generación del mapa de cultivo fueron 0, 8 a 2.1cm en la dirección Norte y 1, 6 a 3, 8 cm en la dirección Este. Los resultados sugieren la viabilidad positiva de la creación de un mapa de localización de plantas mediante un equipo de plantación RTK-GPS. Este mapa puede ser usado como mapa de prescripción para el control de mala hierba.
En la actualidad son varias las patentes que presentan metodologías y/o procedimientos basados en el uso de los sistemas de posicionamiento en tiempo real aplicado al sector agrícola (US 2003187560 y WO 9837977) y teledetección (P2005031 03) . También existen algunas patentes de equipos para la eliminación de mala hierba de forma optimizada, pero que en ningún caso consiguen...
Reivindicaciones:
1. Dispositivo de desplazamiento lateral acoplable a vehículos autopropulsados, con capacidad de control de mala hierba en cultivos en líneas,
caracterizado porque comprende a) elementos de escarda mecánica y química; b) un sistema de posicionamiento ajustable de dichos elementos de escarda mecánica y química, estando dicho posicionamiento controlado por GPS. c) un sistema combinado de eliminación de mala hierba que comprende los elementos de escarda mecánica y química, configurado para realizar separadamente un tratamiento mecánico entre líneas de cultivo y un tratamiento químico en las Ifneas de cultivo, a través del ajuste del sistema de posicionamiento de dichos elementos de escarda mecánica y química.
Patentes similares o relacionadas:
Dispositivo portaherramientas para facilitar la selección de filas, procedimiento de instalación y sistema agrícola asociados, del 25 de Marzo de 2020, de Solemat: 1. Dispositivo portaherramientas destinado a interponerse entre un tractor y una herramienta de viticultura o arboricultura, permitiendo dicho […]
Vehículo de trabajo, del 30 de Octubre de 2019, de YANMAR CO., LTD: Vehículo de trabajo configurado para trabajar mientras se desplaza, provisto de una máquina móvil y de una máquina de trabajo, que comprende: […]
DISPOSITIVO PALPADOR PARA DETECCIÓN DE POSTES METÁLICOS, del 10 de Octubre de 2019, de INDUSTRIAS DAVID, S.L.U: Dispositivo palpador para detección de postes metálicos, con al menos un primer mecanismo en un lateral de los medios de actuación de la máquina, que comprende […]
DISPOSITIVO PALPADOR PARA DETECCIÓN DE POSTES METÁLICOS, del 4 de Octubre de 2019, de INDUSTRIAS DAVID, S.L.U: Dispositivo palpador para detección de postes metálicos, con al menos un primer mecanismo en un lateral de los medios de actuación […]
Máquina teledirigida y/o autónoma para aplicación de fitosanitarios y tracción de aperos agrícolas, del 16 de Julio de 2019, de ROMERA MANZANO, Javier: 1. Máquina teledirigida y/o autónoma para aplicación de tratamientos fitosanitarios y tracción de aperos agrícolas caracterizada por un diseño modular compuesto […]
Sistema de comunicación inalámbrica para vehículos agrícolas, del 26 de Junio de 2019, de CNH Industrial Italia S.p.A: Un sistema de comunicación inalámbrica para coordinar el movimiento de una pluralidad de vehículos agrícolas, comprendiendo cada vehículo un sistema de posicionamiento […]
 Un método de control de las condiciones de conducción de un tractor de una máquina agrícola y una máquina agrícola, del 26 de Junio de 2019, de Kverneland Group Mechatronics BV: Método de control de las condiciones de conducción de un tractor de una máquina agrícola que tiene
- un tractor ;
- un apero para aplicar […]
Un método de control de las condiciones de conducción de un tractor de una máquina agrícola y una máquina agrícola, del 26 de Junio de 2019, de Kverneland Group Mechatronics BV: Método de control de las condiciones de conducción de un tractor de una máquina agrícola que tiene
- un tractor ;
- un apero para aplicar […]
VÁLVULA REGULADORA DE FRENO PARA REMOLQUE AGRÍCOLA, del 9 de Mayo de 2019, de ALIAGRO 2005, S.L: 1. Válvula reguladora de freno para remolque agrícola que se caracteriza porque comprende una válvula reductora de presión de dos vías y acción […]