Método de detección remota de emisiones de un vehículo.
Método de detección remota de emisiones de un vehículo conducido en una carretera,
que comprende:
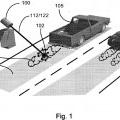
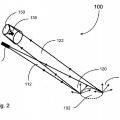
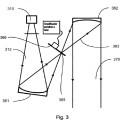
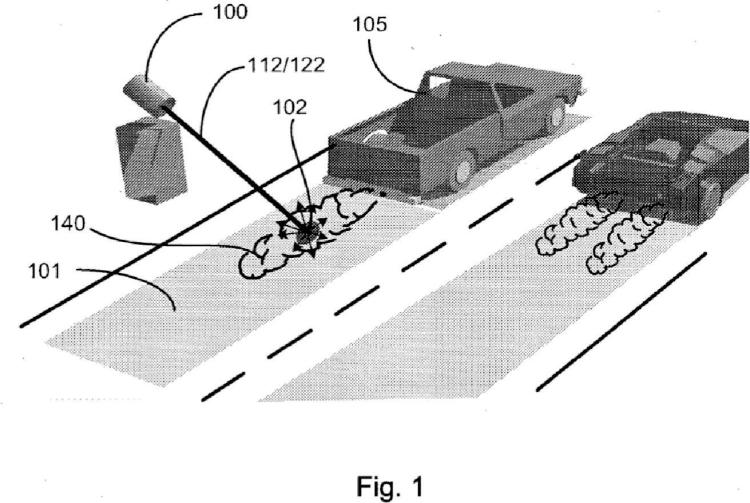
A) desplegar una fuente (110, 310; 610) para emitir un haz de luz y un detector (130; 530; 630) para detectar luz en el mismo lado de la carretera;
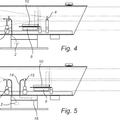
B) transmitir el haz de luz emitido por dicha fuente (110, 310; 610) a través de una columna de humo de escape emitida desde el vehículo a una superficie en la que se dispersa la luz transmitida, en la que dicha superficie es una parte inferior (802) de un puente a través del que se conduce el vehículo o es la superficie (102) de un carril de la carretera por la que se conduce el vehículo;
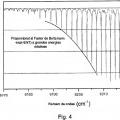
C) recibir, mediante dicho detector, al menos una porción de la luz dispersa dispersada desde la superficie y procesar la luz recibida en el mismo para proporcionar uno o más espectros de la luz recibida para determinar componentes y concentraciones de la columna de humo de escape.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2010/040330.
Solicitante: Hager, J. Stewart.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 7308 Nubbin Ridge Drive Knoxville, TN 37919 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HAGER,J. STEWART.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01M15/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 15/00 Ensayos de motores. › mediante la monitorización de los gases de escape.
- G01N21/31 G01 […] › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › investigando el efecto relativo del material para las longitudes de ondas características de elementos o de moléculas específicas, p. ej. espectrometría de absorción atómica.
- G01N21/35 G01N 21/00 […] › utilizando luz infrarroja (G01N 21/39 tiene prioridad).
- G01N21/3504 G01N 21/00 […] › para análisis de gases, p. ej. análisis multi-gas.
PDF original: ES-2553396_T3.pdf
Patentes similares o relacionadas:
DISPOSITIVO PORTABLE Y MÉTODO PARA LA ESTIMACIÓN NO INVASIVA DEL NIVEL DE GLUCOSA EN SANGRE, del 30 de Julio de 2020, de UNIVERSIDAD DE SEVILLA: El dispositivo comprende una unidad de medida con un módulo de medición del nivel de glucosa, un primer módulo de computación , para procesar datos de una primera […]
DISPOSITIVO PORTABLE Y MÉTODO PARA LA ESTIMACIÓN NO INVASIVA DEL NIVEL DE GLUCOSA EN SANGRE, del 23 de Julio de 2020, de UNIVERSIDAD DE SEVILLA: Dispositivo portable y método para la estimación no invasiva del nivel de glucosa en sangre. El dispositivo comprende una unidad de medida con un módulo […]
Análisis espectral del infrarrojo medio de un material heterogéneo fluente, del 27 de Noviembre de 2019, de FOSS ANALYTICAL A/S: Un procedimiento de determinación de componentes de una muestra de leche heterogénea fluente que comprende: obtener una muestra de leche heterogénea; […]
 Dispositivo para mediciones de absorción de radiación y método para calibración del mismo, del 25 de Septiembre de 2019, de OPSIS AB: Un dispositivo para mediciones de absorción de radiación, que comprende,
una fuente de radiación que emite radiación electromagnética que tiene una longitud […]
Dispositivo para mediciones de absorción de radiación y método para calibración del mismo, del 25 de Septiembre de 2019, de OPSIS AB: Un dispositivo para mediciones de absorción de radiación, que comprende,
una fuente de radiación que emite radiación electromagnética que tiene una longitud […]
Procedimiento para determinar el estado de espín de compuestos de transición de espín, uso del procedimiento para leer datos digitales y medio de memoria óptica o magnetoóptica, del 10 de Julio de 2019, de TECHNISCHE UNIVERSITAT WIEN: Procedimiento para determinar el estado de espín de un compuesto de transición de espín por medio de radiación con luz en un dominio de longitudes de onda definido para […]
TRATAMIENTO CON CALOR DE ROPA DE LAVADO, del 20 de Junio de 2019, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Tratamiento con calor de ropa de lavado. Un dispositivo para controlar un tratamiento con calor de ropa de lavado comprende una fuente de luz que está configurada […]
Método para medir una respuesta de muestra espectral, del 9 de Mayo de 2019, de MAX-PLANCK-GESELLSCHAFT ZUR FORDERUNG DER WISSENSCHAFTEN E.V.: Método de medición de una respuesta espectral de una muestra , que comprende las etapas siguientes: - generar una luz de sonda que presenta […]
Sensor de humedad y procedimiento para la medición de humedad., del 1 de Mayo de 2019, de BAM BUNDESANSTALT FUR MATERIALFORSCHUNG UND -PRUFUNG: Procedimiento de medición de humedad para un sensor de fibra óptica 200, que comprende (a) proporcionar datos de medición de retrodispersión […]