Sistema de carga y descarga automática de camiones y contenedores.
Sistema de carga y descarga automática de camiones y contenedores,
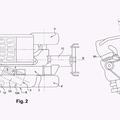
que estando preferente y fundamentalmente previsto para permitir la carga y descarga de paletas del interior de la caja de un camión o contenedor, en una instalación industrial con uno o varios muelles, se caracteriza porque se constituye a partir de un sistema de trasbordo formado por un bastidor (1) desplazable de forma rectilínea sobre un carril guía (2) establecido en el suelo, para permitir su situación en uno u otro muelle de carga, estando unido a dicho bastidor (1) un carro longitudinal (4), por medio de una articulación que le proporciona libertad para absorber las variaciones de plano durante el avance longitudinal, contando dicho carro longitudinal (4) con una estructura telescópica (5) que posibilita el guiado durante el desplazamiento en un sentido u otro del carro longitudinal (4) para introducir/retirar la carga (6) en/del interior de la caja de un camión (7); habiéndose previsto que el carro longitudinal (4) incluya en su parte delantera un posicionador de horquillas triple (8) y tras ella una parte anterior (9) y una parte posterior (11) con su correspondiente sistema de tracción, para el desplazamiento de dicho carro longitudinal (4), mientras que la estructura telescópica (5) está formada por dos partes (5', 5") desplazables una respecto de la otra para conseguir su extensibilidad o recogimiento, estando dichas partes (5', 5") articuladas entre si, mediante una articulación (21) y articuladas a su vez al bastidor (1) situado en el sistema de trasbordo y al propio carro longitudinal (4), a través del punto de articulación (22) de la parte posterior (5') y punto de articulación (23) de la parte anterior (5"); habiéndose previsto además que dicha estructura telescópica (5) se complemente con unos apoyos de ruedas (20) sobre el suelo para soportar los esfuerzos originados por el peso o carga.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12187069.
Solicitante: Montajes de Maquinaría de Precisión, S.A.
Nacionalidad solicitante: España.
Inventor/es: BAUSELA SÁNCHEZ,FERNANDO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G67/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 67/00 Carga o descarga de vehículos (por medios incorporados en los vehículos B60 - B64, p. ej. B60P 1/00, B61D 9/00, B63B 27/00, B64D 9/00; instalaciones en tierra para aeronaves o plataformas de los portaaviones B64F 1/32). › Carga o descarga de vehículos terrestres.
- B65G67/20 B65G 67/00 […] › Carga de vehículos cubiertos.
- B65G67/24 B65G 67/00 […] › Descarga de vehículos terrestres.
- B66F9/065 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › sin mástiles (gatos móviles de tipo garaje montados sobre carretillas o rodillos B66F 5/00).
- B66F9/12 B66F 9/00 […] › Plataformas; Horquillas; Otros órganos que soportan o sujetan la carga.
PDF original: ES-2545124_T3.pdf
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema de carga/descarga automática de camiones y/o contenedores, previsto preferente y fundamentalmente para la carga y descarga de paletas en el interior de la caja de los camiones y puede ser usado también para la carga y descarga de contenedores, sin descartar cualquier otra aplicación en la que sea factible el uso del propio sistema.
El objeto de la invención es conseguir una automatización de carga/descarga de camiones, que sirva para varios muelles de carga, sin precisar intervención humana y que pueda ser utilizado en cualquier camión, sin tener que realizar ningún tipo de modificación en éstos.
Asimismo es objeto de la invención conseguir que el sistema sea eficaz independientemente de la longitud del camión, así como de realizar la carga y descarga a alta velocidad, con las máximas condiciones de seguridad para el personal de planta y transportista.
Es igualmente objeto de la invención conseguir que sin elementos adicionales al sistema se eviten movimientos bruscos y el contacto de la carga con las paredes laterales de la caja del camión, durante el proceso de carga y descarga.
ANTECEDENTES DE LA INVENCIÓN
Tradicionalmente los sistemas de carga de paletas en camiones se suelen realizar de forma manual mediante una carretilla elevadora conducida por un operario, de manera que con este sistema de trabajo se carga un máximo de 60 paletas por hora.
No obstante existen numerosos tipos de sistemas de carga, pudiendo citar entre otros los siguientes:
Sistema conocido como de "pista de cadenas" en el que es necesaria una instalación en el suelo de la caja del camión de seis filas de cadenas en toda su longitud, las cuales se levantan en el proceso de carga y descarga y posteriormente desplazan toda la mercancía paletizada.
Asimismo, existe un sistema conocido como "de láminas", similar al anteriormente comentado pero abarcando toda la superficie, por lo que se puede utilizar para cargas que no estén paletizadas, por ejemplo neumáticos.
Estos dos sistemas implican tener que realizar modificaciones en el
camión.
Otro sistema comúnmente conocido como "de patines" (Load Runner), está basado en un soporte situado debajo de las paletas, al objeto de que las horquillas se introduzcan por debajo de dichos soportes para introducir o extraer la carga. Este sistema implica la colocación de soportes en la caja del camión, lo que obliga a implementar el propio sistema de carga y descarga tanto en el punto de origen como en el punto de destino de la carga, puesto que los soportes sobre los que irá colocada la carga impedirán la descarga por los sistemas tradicionales.
Otro sistema está basado en lo que se denomina "Automatic Guided Vehicle", consistente en varios vehículos autónomos que se desplazan por la planta de manera autónoma, colocando las paletas en el camión de uno en uno. Este sistema tiene el condicionante de que los márgenes no son suficientes para realizar la tarea de manera óptima, siendo además un sistema más adecuado para países como Estados Unidos o Canadá, debido a que en estos países los camiones son más anchos que en Europa y por tanto los márgenes de funcionamiento mayores. Es decir, en Europa no suelen emplearse, y en el caso de utilizarse es solamente para tareas muy específicas. A ello hay que añadir el hecho de que la velocidad de carga es menor (una paleta en cada ciclo de carga) y que además supone un elevado coste de instalación en cualquiera de sus modalidades, ya sea sistema de guiado láser, por medio de espejos o mediante cable enterrado.
Otro sistema está basado en un brazo telescópico con un posicionador de horquillas y un mástil en uno de sus extremos para la realización de la carga, estando el brazo apoyado sobre ruedas para reducir los momentos flectores, incluyendo sistemas hidráulicos automatizados, y aunque en este caso la carga se puede realizar sin modificaciones en el camión, sin embargo presenta la desventaja de que la velocidad de carga es muy baja, debido a que el tiempo empleado en la extensión y recogida del brazo telescópico es elevado. Asimismo, para la recogida del brazo se necesita mucho espacio y el sistema solamente es aplicable para un muelle, por lo que en caso de tener que servir a varios muelles implicaría la instalación del sistema en todos ellos y por consiguiente una alta inversión.
Otro sistema es el conocido como "Automatic Truck Loading System", basado en una plataforma que transporta un módulo de carga que se desplaza a lo largo de varios muelles de carga.
Este sistema es más completo que los anteriores y aparentemente válido para cualquier camión, pero por sus características no tiene un buen comportamiento con aquellos de caja tipo tauliner, que por otra parte deben llevar necesariamente incorporados rodapiés en los laterales sobre los que pueda apoyar y rodar su sistema de guiado mecánico. Por las deformaciones que el sistema de guiado pueda producir en la caja, es más recomendable el uso de camiones rígidos como los frigoríficos. Por otra parte y debido a las rigideces de su sistema de guiado formado por ruedas laterales, es poco tolerante a los cambios de pendiente o a fallos mecánicos que puedan producir deslizamientos.
También existe un riesgo de seguridad en este sistema, puesto que el módulo de carga tiene un peso que conjuntamente con la carga a veces excede del límite de carga por eje y produce un balanceo brusco en el camión, lo que requiere que la caja del camión tenga cierta resistencia. El descenso inevitable de la caja por el peso tiene que prevenirse necesariamente apoyando el chasis en gatos hidráulicos que sean capaces de soportar el peso del conjunto cargado. Esta operación obliga a la intervención humana o a una técnicamente complicada y costosa automatización de la que hoy por hoy no gozan estos sistemas.
Por los motivos expuestos, este sistema que aparentemente se ajusta mejor a las necesidades que demanda la aplicación no es una opción adecuada para garantizar de forma generalizada la viabilidad del proceso automático en términos técnicos y económicos.
Además de todos los sistemas comentados, pueden citarse otros correspondientes a los descritos en diversas patentes, tales como la patente alemana DE 19647110 Al; DE 3151402 Al; EP 0346292 Al; EP 2022738
Al; ES 2109836; IT 1228235 B; US 56885416 A, entre otros, de manera que en ningún caso los resultados obtenidos con los sistemas descritos en estas patentes de invención, como en los casos anteriores sean óptimos, no siendo capaces de conseguir los ciclos de carga suficientes para justificar la necesidad y viabilidad de su implantación, independientemente de que no se consigue una automatización plena ni un funcionamiento eficaz, rápido y seguro en la carga del camión, razón por la cual su uso no está aún generalizado.
DESCRIPCIÓN DE LA INVENCIÓN
El sistema que se preconiza ha sido concebido para resolver la problemática anteriormente expuesta, en base a una solución sencilla pero de gran eficacia.
Mas concretamente el sistema de la invención, previsto para su utilización en la carga y descarga de camiones para varios muelles de carga, comprende una estructura desplazable y denominada en adelante "sistema de trasbordo", que permite al conjunto desplazarse a lo largo de los distintos muelles de carga para poder abordar la carga y descarga en los distintos camiones que se tengan disponibles. El sistema de trasbordo se basa preferentemente en un bastidor que apoya en cuatro ruedas, dos de ellas motorizadas y que dispone de rodillos guía dispuestos en un eje central, que permiten al conjunto formado por éste y un carro longitudinal desplazarse a lo largo de un carril guía transversal a los muelles de carga. El sistema de trasbordo cuenta con un una articulación que le une al carro longitudinal en cuyo extremo incorpora un posicionador de horquillas triple para la toma y transferencia de las paletas, estando este carro longitudinal dotado de un sistema telescópico que posibilita su guiado durante las maniobras de
extensibilidad y retraimiento para la introducción o retirada de la carga del camión, y para la extracción del carro longitudinal hasta su posición de origen.
Los desplazamientos del sistema de trasbordo se realizarán mediante accionamiento de motores eléctricos, complementándose con un sistema de guiado para realizar siempre el movimiento de forma rectilínea, guiándose sobre un carril guía situado sobre el suelo, y a través del cual rodarán unas pequeñas ruedas (rodillos guía) para permitir tener el sistema de trasbordo en una posición conocida.
El carro longitudinal debe estar apoyado sobre el suelo sobre... [Seguir leyendo]
Reivindicaciones:
1.- Sistema de carga y descarga automática de camiones y contenedores, que estando preferente y fundamentalmente previsto para permitir la carga y descarga de paletas del interior de la caja de un camión o contenedor, en una instalación industrial con uno o varios muelles, se caracteriza porque se constituye a partir de un sistema de trasbordo formado por un bastidor (1) desplazable de forma rectilínea sobre un carril guía (2) establecido en el suelo, para permitir su situación en uno u otro muelle de carga, estando unido a dicho bastidor (1) un carro longitudinal (4), por medio de una articulación que le proporciona libertad para absorber las variaciones de plano durante el avance longitudinal, contando dicho carro longitudinal (4) con una estructura telescópica (5) que posibilita el guiado durante el desplazamiento en un sentido u otro del carro longitudinal (4) para introducir/retirar la carga (6) en/del interior de la caja de un camión (7); habiéndose previsto que el carro longitudinal (4) incluya en su parte delantera un posicionador de horquillas triple (8) y tras ella una parte anterior (9) y una parte posterior (11) con su correspondiente sistema de tracción, para el desplazamiento de dicho carro longitudinal (4), mientras que la estructura telescópica (5) está formada por dos partes (5, 5") desplazables una respecto de la otra para conseguir su extensibilidad o recogimiento, estando dichas partes (5, 5") articuladas entre si, mediante una articulación (21) y articuladas a su vez al bastidor (1) situado en el sistema de trasbordo y al propio carro longitudinal (4), a través del punto de articulación (22) de la parte posterior (5) y punto de articulación (23) de la parte anterior (5"); habiéndose previsto además que dicha estructura telescópica (5) se complemente con unos apoyos de ruedas (20) sobre el suelo para soportar los esfuerzos originados por el peso o carga.
2.- Sistema de carga y descarga automática de camiones y
contenedores, según reivindicación 1, caracterizado porque el carro longitudinal (4), además del posicionador de horquillas triple (8) previsto en la parte anterior, incluye unos ejes (14) y (15) en la parte anterior (9) y en la parte posterior (11), respectivamente, con accionamiento por motorreductor eléctrico (12, 13), contando cada uno de tales ejes (14, 15) con una pluralidad de ruedas (18, 19), de apoyo sobre el suelo; habiéndose previsto que dicho carro longitudinal (4) es empujado por el bastidor (1) del sistema de trasbordo, en el desplazamiento transversal de dicho sistema de trasbordo, sobre ruedas de desplazamiento transversales.
3.- Sistema de carga y descarga automática de camiones y contenedores, según reivindicaciones anteriores, caracterizado porque solidario con el bastidor (1) que constituye el sistema de trasbordo, se ha previsto una zona de ubicación para unas posibles cintas de cadenas o rodillos de posicionado de la carga (6) que accede a un carro transfer (25) que recoge dicha carga (6) y la desplaza hasta colocarla por delante y frente al posicionador de horquillas triple (8) del carro longitudinal (4), para tras la recogida por parte de dicha horquilla elevadora (8) de la carga (6), desplazarse el carro transfer (25) hacia atrás y permitir la introducción por parte del posicionador de horquillas triple (8) al interior de la caja del camión (7).
4.- Sistema de carga y descarga automática de camiones y contenedores, según reivindicaciones anteriores, caracterizado porque se incluyen medios de guiado mediante sensores situados en los laterales del posicionador de horquillas triple (8) para establecer la distancia de ésta a las paredes laterales de la caja del camión (7), de manera que en combinación con un sistema de control permitir llevar a cabo el posicionado de las horquillas (8) hacia un lado u otro y evitar el contacto con las paredes laterales internas de la caja (7) del camión.
5.- Sistema de carga y descarga automática de camiones y contenedores, según reivindicaciones 1 a 3, caracterizado porque incluye medios de posicionamiento del sistema de trasbordo para situar el mismo en
correspondencia con el muelle (24) respectivo y enfrentadamente a la caja del camión (7) que se pretende cargar, basándose dichos medios de posicionamiento en sensores previstos en el propio muelle de carga para determinar la posición relativa entre la caja (7) del camión y el sistema de trasbordo.
6.- Sistema de carga y descarga automática de camiones y contenedores, según reivindicación 5, caracterizado porque los medios de posicionamiento del sistema de trasbordo están constituidos por un sensor escáner que mediante barrido determina la posición del mismo con respecto a
la caja (7) del camión a cargar.
Patentes similares o relacionadas:
Vehículo de transporte sin conductor para el transporte seguro de cargas pesadas, del 15 de Abril de 2020, de GRENZEBACH MASCHINENBAU GMBH: Sistema de transporte para el transporte de carga que está constituido por un vehículo de transporte sin conductor en conexión con un carro móvil sobre […]
Sistema de estabilización de máquinas de explotación automotrices, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un método para controlar estabilizadores de tijera de máquinas de explotación automotrices, tales como manipuladores telescópicos o similares, […]
Telemanipulador con un sistema de blindaje, del 13 de Noviembre de 2019, de Manitou Italia S.r.l: Un telemanipulador que comprende un sistema de blindaje, el cual, a su vez, comprende: una estructura de cabina para dicho telemanipulador […]
Carro autopropulsado, del 22 de Octubre de 2019, de Siemens Gamesa Renewable Energy A/S: Un carro autopropulsado para manejar una pala de turbina eólica , cuyo carro comprende - unos medios de accionamiento para propulsar […]
Un órgano de agarre para vehículos de movimiento de carga, del 31 de Julio de 2019, de Manitou Italia S.r.l: Un órgano de agarre para vehículos de movimiento de carga, que comprende: una estructura de soporte , acoplable de manera desmontable a un brazo de soporte de […]
 Vehículo de manipulación, del 31 de Julio de 2019, de MANITOU BF: Vehículo de manipulación provisto de una cabina de conducción y que comprende un dispositivo de transporte de una herramienta que incluye una pluma telescópica montada […]
Vehículo de manipulación, del 31 de Julio de 2019, de MANITOU BF: Vehículo de manipulación provisto de una cabina de conducción y que comprende un dispositivo de transporte de una herramienta que incluye una pluma telescópica montada […]
Dispositivo de elevación de mercancías paletables, del 24 de Julio de 2019, de Sprick GmbH Bielefelder Papier- und Wellpappenwerke & Co: Dispositivo de elevación de mercancías paletables para cargar y descargar un palé de transporte, tal como un palé estándar , por ejemplo un […]
Vehículo de elevación con un sistema de control de estabilidad transversal, del 3 de Julio de 2019, de MERLO PROJECT S.R.L.: Un vehículo de elevación que comprende: - un bastidor que soporta un eje delantero y un eje trasero, que soportan, respectivamente, […]