Aparato para la colocación de una prótesis ósea utilizando un sistema de localización.
Un producto legible por un ordenador implementado en un medio legible por un ordenador,
legible por undispositivo (112) de cálculo de un sistema quirúrgico (100) de navegación para generar un medio (601, 701,801, 901) de visualización para el sistema quirúrgico (100) de navegación para ser utilizado para la colocaciónen un fémur de un componente protésico femoral de una prótesis de sustitución de la articulación de la cadera,comprendiendo el producto:
primeras instrucciones ejecutables por un ordenador para generar y presentar visualmente información a uncirujano para que palpe referencias anatómicas (204, 206, 208) en la pelvis y registre las referencias (204,206, 208) con respecto al marcador pélvico (116d, 404) por medio del sistema (100) de navegación paraadquirir un sistema de referencia pélvico;
segundas instrucciones ejecutables por un ordenador para generar y presentar visualmente información alcirujano para que adquiera un centro de rotación (A) de dicha articulación de la cadera en dicho sistema dereferencia pélvico;
terceras instrucciones ejecutables por un ordenador para generar y presentar visualmente información alcirujano para palpar un primer punto femoral (P) para adquirir dicho primer punto femoral (P)sustancialmente fijo con respecto a dicho fémur en dicho sistema de referencia pélvico;
cuartas instrucciones ejecutables por un ordenador para calcular una longitud de una primera línea (M)entre dicho primer punto femoral adquirido (P) y dicho centro de rotación (A) de dicha articulación de lacadera;
quintas instrucciones ejecutables por un ordenador para generar y presentar visualmente información alcirujano para que adquiera una posición de un centro de rotación (A') de dicho componente implantado decúpula protésica (305) en dicho sistema de referencia pélvico;
sextas instrucciones ejecutables por un ordenador para calcular una primera diferencia en la posición entredicho centro de rotación (A) de dicha articulación de la cadera y dicho centro de rotación (A') de dichocomponente implantado (305) de cúpula protésica;
séptimas instrucciones ejecutables por un ordenador para calcular una posición de un centro de rotación(A') de una cabeza femoral protésica de un implante protésico femoral si está implantado en un agujero endicho fémur como una función de una posición de un marcador montado en dicho agujero;
octavas instrucciones ejecutables por un ordenador para generar y presentar visualmente información alcirujano para que readquiera dicho primer punto femoral (P') con respecto a dicha posición de dichomarcador montado en dicho agujero mientras que dicho marcador está montado en dicho agujero;novenas instrucciones ejecutables por un ordenador para calcular una longitud de una línea (M') entre dichoprimer punto femoral (P) readquirido y dicho centro de rotación (A') de dicha cabeza femoral protésica;
décimas instrucciones ejecutables por un ordenador para calcular una segunda diferencia en longitud dedicha primera línea (M) y dicha segunda línea (M'); y
undécimas instrucciones ejecutables por un ordenador para representar visualmente datos de longitud de lapierna como una función de dichas diferencias primera y segunda.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/058099.
Solicitante: AESCULAP AG.
Nacionalidad solicitante: Alemania.
Dirección: AM AESCULAP-PLATZ 78532 TUTTLINGEN ALEMANIA.
Inventor/es: MOLLARD,BENOIT, BADER,UWE, KAMMERZELL,SERGEJ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
PDF original: ES-2404291_T3.pdf
Fragmento de la descripción:
Aparato para la colocación de una prótesis ósea utilizando un sistema de localización Antecedentes de la invención La presente invención versa acerca de sistemas quirúrgicos de navegación, denominados a veces dispositivos de localización. Más en particular, la presente invención versa acerca de un producto legible por un ordenador implementado en un medio legible por un ordenador legible por un dispositivo de cálculo de un sistema quirúrgico de navegación para la colocación de una prótesis ósea durante una cirugía ortopédica utilizando un sistema quirúrgico de navegación según la parte introductoria de la reivindicación 1.
Son conocidos muchos tipos distintos de sistemas quirúrgicos de navegación, incluyendo sistemas quirúrgicos de navegación que dependen de aparatos y de técnicas ópticas, electromagnéticas, mecánicas, ultrasónicas y giroscópicas de detección de la orientación y/o de la posición. Son bien conocidos en la actualidad los sistemas quirúrgicos de navegación basados en principios ópticos, electromagnéticos, mecánicos y ultrasónicos. Los sistemas quirúrgicos de navegación basados en giróscopos son, quizás, los que no están igual de bien establecidos. Los sistemas giroscópicos utilizan sensores de inercia. En los sistemas giroscópicos, cada marcador comprende uno o más giróscopos. Si se incorporan seis sensores giroscópicos en un marcador corporal rígido, específicamente, tres sensores para detectar la fuerza y/o la aceleración en direcciones lineales y tres sensores para determinar las fuerzas o la aceleración de rotación, se puede hacer un seguimiento de un marcador en los seis grados de libertad. Se debe hacer notar que los sensores giroscópicos no proporcionan información en cuanto a la posición en sí, sino acerca de la aceleración o el movimiento. Las posiciones y/u orientaciones de tales sensores no están determinadas directamente en un sistema de coordenadas, sino que son calculadas a partir de cambios en la posición y la orientación.
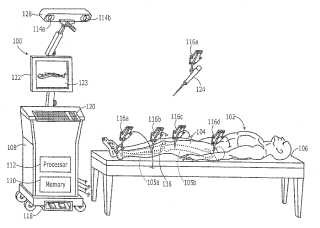
En un sistema quirúrgico ejemplar 100 de navegación infrarroja óptica tal como se ilustra en la Figura 1, se utilizan al menos dos sensores 114a, 114b (por ejemplo, cámaras infrarrojas) montados en un alojamiento 128 para detectar una pluralidad de marcadores 116a, 116b, 116c, 116d, 116e que pueden estar montados en los huesos 105a, 105b del paciente y/o en las herramientas quirúrgicas 124. Más en particular, las cámaras 114a, 114b están acopladas a un ordenador 112 que analiza las imágenes obtenidas por las cámaras y detecta las posiciones y las orientaciones de los diversos huesos y/o herramientas que portan los marcadores durante la cirugía y calcula y presenta visualmente al cirujano en un monitor 122 información útil para llevar a cabo la cirugía. El sistema de ordenador puede ser proporcionado en un carro trasladable 108 y puede incluir una memoria 110 para almacenar datos, un teclado 120, y/o pedales 118 para introducir datos. Normalmente, se utilizan simultáneamente dos o más de los marcadores 116a-116e. Un sistema quirúrgico de navegación de ese tipo es el OrthoPilot disponible en Aesculap, Inc., de Center Valley, Pensilvania, EE. UU.
Cada marcador 116 comprende una base con un mecanismo 217 de montaje en un extremo para montar en un mecanismo complementario 201 de montaje en un equipo médico tal como un puntero quirúrgico 124, un tornillo óseo, o un útil de corte. Hay al menos tres transmisores LED infrarrojos 208 que se extienden desde el otro extremo de la base. De forma alternativa, en vez de transmisores, el sistema podría utilizar marcadores 116a que portan reflectores infrarrojos 208a, como se muestra en la Figura 2B, que ilustra un marcador ejemplar 116a del tipo reflector. Cuando se utilizan reflectores, el sistema quirúrgico de navegación incluye una fuente 107 de luz infrarroja dirigida hacia el campo quirúrgico, de forma que los reflectores 208 volverán a reflejar luz infrarroja a las dos cámaras 114a, 114b. Con al menos tres transmisores 208 (o reflectores 208a) por marcador y al menos dos cámaras, hay disponible suficiente información para que el ordenador para que determine la posición y la orientación exactas de cada marcador 116 (o 116a) en los seis grados de libertad (por ejemplo, coordenadas x, y, z, y ángulos de balanceo, de inclinación y de guiñada) .
El mecanismo de montaje en el extremo de la base del marcador está diseñado para acoplarse con un mecanismo complementario de montaje en el instrumento quirúrgico únicamente en una posición y orientación. El ordenador está preprogramado con información relacionada con la posición de la porción operativa del instrumento médico con respecto a la posición del marcador cuando está montado en él. De esta forma, el ordenador también conocerá la posición y la orientación del instrumento médico y su porción operativa. Por ejemplo, el instrumento médico puede ser el puntero 124, mostrado en la Figura 1, que tiene una punta 124a, cuya posición exacta es conocida de forma relativa al marcador 116a.
En la mayoría de los procedimientos quirúrgicos de navegación, es necesario distinguir entre los marcadores 116 o 116a entre sí. Esto puede hacerse de varias formas distintas. Si se utilizan transmisores LED, se puede programar cada transmisor 208 para emitir luz únicamente durante un intervalo específico de tiempo que el ordenador sabe que es el intervalo de tiempo asignado a ese transmisor particular en ese marcador particular. Los LED son iluminados en secuencia con una frecuencia muy alta, de forma que el ordenador tiene información casi continua en cuanto a la ubicación exacta de cada LED. De forma alternativa, cuando se utilizan reflectores, cada marcador 116a puede tener sus tres o más reflectores 208a colocados en posiciones relativas ligeramente distintas entre sí, de forma que el ordenador pueda distinguir qué marcador está observando al determinar la relación geométrica entre los tres o más reflectores 208a en el marcador 116a.
Los marcadores 116 están montados fijamente en huesos 105 (por medio de tornillos óseos) y/o en instrumentos médicos 124 (Figura 1) o 202 (Figura 2A) colocados en el campo de visión de las cámaras 114a, 114b, de forma que el ordenador 112 pueda hacer un seguimiento de la ubicación y de la orientación de esos huesos y/o instrumentos médicos. Entonces, el ordenador generará información útil para ayudar al cirujano a determinar ubicaciones o alineaciones apropiadas para implantes protésicos, útiles de corte, y similares y los representan visualmente en un medio 123 de visualización en el monitor 122.
Un uso conocido de los sistemas quirúrgicos de navegación es la cirugía de sustitución total de la articulación de la cadera. Por ejemplo, en una cirugía de sustitución total de la articulación de la cadera se sustituye la articulación de la cadera del paciente por componentes protésicos incluyendo una cúpula protésica (esencialmente un encastre de bola) montada en la pelvis en el acetábulo escariado y un componente protésico femoral, que comprende una cabeza con forma de bola montada en un vástago. Se inserta el vástago en un canal preparado a lo largo del canal femoral. La bola encajará en la cúpula para formar la nueva articulación protésica de la cadera.
En la actualidad, hay varios sistemas quirúrgicos de navegación en el mercado que ofrecen un módulo de sustitución total de cadera. Dependiendo del sistema quirúrgico de navegación y del software, se utiliza el sistema para ayudar a colocar únicamente el componente pélvico, es decir, la cúpula, mientras que se coloca manualmente el componente femoral o se utiliza el sistema quirúrgico de navegación para ayudar en la colocación tanto de la cúpula como del componente femoral.
Algunos de los parámetros de colocación más importantes para la sustitución de la articulación de la cadera son (1) el alargamiento/acortamiento de la pierna (también denominado cranealización/caudalización) , (2) la medialización/lateralización de la pierna y/o el desplazamiento femoral, y (3) el intervalo de movimiento.
El alargamiento/acortamiento hace referencia al cambio, si lo hay, en la pierna del paciente después de que se ha instalado la articulación protésica de la cadera. Normalmente, es deseable que ambas piernas del paciente tengan una longitud idéntica después de la cirugía. A menudo, esto significa que no debería haber ningún alargamiento ni acortamiento. Sin embargo, a menudo las piernas no tienen una longitud idéntica antes de la cirugía y, por lo tanto, puede ser deseable aumentar o reducir la longitud de la pierna del paciente.
No existe consenso claro en la profesión acerca de la definición exacta ni de la medialización/lateralización... [Seguir leyendo]
Reivindicaciones:
1. Un producto legible por un ordenador implementado en un medio legible por un ordenador, legible por un dispositivo (112) de cálculo de un sistema quirúrgico (100) de navegación para generar un medio (601, 701, 801, 901) de visualización para el sistema quirúrgico (100) de navegación para ser utilizado para la colocación en un fémur de un componente protésico femoral de una prótesis de sustitución de la articulación de la cadera, comprendiendo el producto:
primeras instrucciones ejecutables por un ordenador para generar y presentar visualmente información a un cirujano para que palpe referencias anatómicas (204, 206, 208) en la pelvis y registre las referencias (204, 206, 208) con respecto al marcador pélvico (116d, 404) por medio del sistema (100) de navegación para adquirir un sistema de referencia pélvico; segundas instrucciones ejecutables por un ordenador para generar y presentar visualmente información al cirujano para que adquiera un centro de rotación (A) de dicha articulación de la cadera en dicho sistema de referencia pélvico; terceras instrucciones ejecutables por un ordenador para generar y presentar visualmente información al
cirujano para palpar un primer punto femoral (P) para adquirir dicho primer punto femoral (P) sustancialmente fijo con respecto a dicho fémur en dicho sistema de referencia pélvico; cuartas instrucciones ejecutables por un ordenador para calcular una longitud de una primera línea (M) entre dicho primer punto femoral adquirido (P) y dicho centro de rotación (A) de dicha articulación de la cadera;
quintas instrucciones ejecutables por un ordenador para generar y presentar visualmente información al cirujano para que adquiera una posición de un centro de rotación (A’) de dicho componente implantado de cúpula protésica (305) en dicho sistema de referencia pélvico; sextas instrucciones ejecutables por un ordenador para calcular una primera diferencia en la posición entre dicho centro de rotación (A) de dicha articulación de la cadera y dicho centro de rotación (A’) de dicho componente implantado (305) de cúpula protésica; séptimas instrucciones ejecutables por un ordenador para calcular una posición de un centro de rotación (A’) de una cabeza femoral protésica de un implante protésico femoral si está implantado en un agujero en dicho fémur como una función de una posición de un marcador montado en dicho agujero; octavas instrucciones ejecutables por un ordenador para generar y presentar visualmente información al
cirujano para que readquiera dicho primer punto femoral (P’) con respecto a dicha posición de dicho marcador montado en dicho agujero mientras que dicho marcador está montado en dicho agujero; novenas instrucciones ejecutables por un ordenador para calcular una longitud de una línea (M’) entre dicho primer punto femoral (P) readquirido y dicho centro de rotación (A’) de dicha cabeza femoral protésica; décimas instrucciones ejecutables por un ordenador para calcular una segunda diferencia en longitud de dicha primera línea (M) y dicha segunda línea (M’) ; y undécimas instrucciones ejecutables por un ordenador para representar visualmente datos de longitud de la pierna como una función de dichas diferencias primera y segunda.
2. El producto de la reivindicación 1, en el que dicha primera diferencia es una diferencia en la posición en una dirección caudal-craneal y en el que dicha función de dichas diferencias primera y segunda comprende una 40 primera suma de dichas diferencias primera y segunda.
3. El producto de la reivindicación 1 o 2, en el que dichas undécimas instrucciones ejecutables por un ordenador comprenden instrucciones para representar visualmente una pluralidad de longitudes potenciales de pierna correspondientes a una pluralidad de distintos implantes protésicos femorales potenciales que pueden ser implantados en dicho agujero.
4. El producto según una cualquiera de las reivindicaciones 1 a 3, que comprende, además:
duodécimas instrucciones ejecutables por un ordenador para generar y presentar visualmente información al cirujano para que adquiera un segundo punto femoral (T) que no se encuentra en dicha primera línea (M) mientras que dicho fémur se encuentra en la misma posición en la que estaba cuando fue adquirido dicho primer punto femoral (P) ;
decimoterceras instrucciones ejecutables por un ordenador para calcular una longitud de una tercera línea (O) perpendicular a dicha primera línea (M) entre dicha primera línea (M) y dicho segundo punto femoral (T) adquirido; decimocuartas instrucciones ejecutables por un ordenador para generar y presentar visualmente información al cirujano para que readquiera dicho segundo punto femoral (T’) con respecto a dicha posición
de dicho marcador montado en dicho agujero mientras dicho marcador está montado en dicho agujero; decimoquintas instrucciones ejecutables por un ordenador para calcular una longitud de una cuarta línea (O’) perpendicular a dicha segunda línea (M’) entre dicha segunda línea (M’) y dicho segundo punto femoral (T’) readquirido; y decimosextas instrucciones ejecutables por un ordenador para calcular una tercera diferencia en longitud
de dicha tercera línea y de dicha cuarta línea.
5. El producto de la reivindicación 4, que comprende, además:
decimoséptimas instrucciones ejecutables por un ordenador para calcular una cuarta diferencia en posición entre dicho centro de rotación de dicha articulación de la cadera y dicho centro de rotación (A’) de dicho componente implantado (305) de cúpula protésica;
en el que dichas instrucciones decimoséptimas ejecutables por un ordenador comprenden instrucciones para representar visualmente un valor para la medialización/lateralización como una función de dichas diferencias tercera y cuarta.
6. El producto de la reivindicación 5, en el que dicha cuarta diferencia es una diferencia en posición en una dirección medial-lateral y en el que dicha función de dichas diferencias tercera y cuarta comprende una 10 segunda suma de dichas diferencias tercera y cuarta.
7. El producto según una cualquiera de las reivindicaciones 1 a 7, en el que dicho primer punto femoral (P) se encuentra aproximadamente en un eje mecánico de dicho fémur.
8. El producto de la reivindicación 7, en el que dicho primer punto femoral (P) es un punto en una rótula y en el que dicha etapa de adquisición de dicho primer punto femoral (P) comprende palpar dicha rótula sobre la piel
con un puntero quirúrgico (124) objeto de seguimiento por medio de dicho sistema quirúrgico (100) de navegación.
9. El producto según una cualquiera de las reivindicaciones 1 a 8, en el que dichas quintas instrucciones ejecutables por un ordenador comprenden:
instrucciones para adquirir al menos un punto en dicha pelvis a partir del que se puede determinar dicho centro de rotación de dicha articulación de la cadera; instrucciones para calcular dicho centro de rotación de dicha articulación de la cadera en base a dicho punto en dicha pelvis.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]