SENSOR DE PAR DE TORSIÓN.
Sensor de par de torsión (10) que incluye un cuerpo interior (12) con un eje (19) con respecto al cual se ha de medir un par de torsión,
y un cuerpo anular exterior (14) que rodea de forma concéntrica el cuerpo interior (12) y que está unido con éste a través de travesaños radiales (16, 18), estando previstos un primer tipo de travesaño (18) con una anchura relativamente grande en la dirección circunferencial pero con dimensiones axiales relativamente pequeñas y un segundo tipo de travesaño (16) relativamente estrechas en la dirección circunferencial pero con dimensiones axiales relativamente grandes, y estando dispuestos en los travesaños del primer tipo (18) unos elementos de medición (26) para medir la torsión,caracterizado porque para calibrar herramientas de enroscamiento (a) el cuerpo anular (14) se mantiene fijo y (b) el cuerpo interior (12) presenta un alojamiento central (20, 21; 40, 42), coaxial al eje (19), para acoplar una herramienta de enroscamiento a comprobar
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03013818.
Solicitante: EDUARD WILLE GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: LINDENALLEE 27 42349 WUPPERTAL ALEMANIA.
Inventor/es: HERBOLD, SIEGFRIED, WILHELM,JOACHIM, Schwafertz,Rainer.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Junio de 2003.
Clasificación Internacional de Patentes:
- B25B23/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25B HERRAMIENTAS O UTILLAJE DE BANCO NO PREVISTOS EN OTRO LUGAR, PARA FIJAR, UNIR, DESENGANCHAR O MANTENER. › B25B 23/00 Partes constitutivas o accesorios de llaves para tuercas, llaves inglesas, destornilladores (tensores de pernos B25B 29/02). › Disposiciones de limitadores de par de blocage o para indicar el par en llaves o destornilladores (acoplamientos o embragues en sí F16D; dispositivos para medir el par en sí G01L).
- G01L25/00C
- G01L3/14A6D
Clasificación PCT:
- G01L25/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › Ensayo o calibrado de los aparatos para la medida de fuerzas, par, trabajo, potencia o rendimiento mecánico.
- G01L3/14 G01L […] › G01L 3/00 Medida del par, del trabajo, de la potencia o del rendimiento mecánico en general. › en los cuales el elemento transmisor del par es distinto a un árbol elástico en torsión.
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2358990_T3.pdf
Fragmento de la descripción:
La invención se refiere a un sensor de par de torsión que incluye un cuerpo interior con un eje con respecto al cual se ha de medir un par de torsión, y un cuerpo anular exterior que rodea de forma concéntrica el cuerpo interior y que está unido con éste a través de travesaños radiales, estando previstos un primer tipo de travesaños con una anchura relativamente grande en la dirección circunferencial pero con dimensiones axiales relativamente pequeñas y un segundo tipo de travesaños relativamente estrechas en la dirección circunferencial pero con dimensiones axiales relativamente grandes, y estando dispuestos en los travesaños del primer tipo unos elementos de medición para medir la torsión.
El documento DE 195 02 616 A1 muestra un sensor de par de torsión de este tipo. Este sensor de par de torsión conocido sirve para medir el par de torsión transmitido por piezas giratorias. El cuerpo anular se une a una pieza giratoria mediante tornillos axiales. El cuerpo interior es un anillo que se une con la otra pieza giratoria también mediante tornillos axiales. El par de torsión de accionamiento se transmite a través de los travesaños. En los travesaños del primer tipo, que son anchas en la dirección circunferencial pero relativamente delgadas en la dirección axial, están dispuestos unos elementos de medición en forma de bandas extensométricas que reaccionan a la torsión. Los travesaños del segundo tipo absorben fuerzas axiales. El sensor de par de torsión de acuerdo con el documento DE 195 02 616 A1 presenta dos travesaños anchos y planos del primer tipo en posiciones diametralmente opuestas con los elementos de medición. Además, simétricamente con respecto a los travesaños del primer tipo también están dispuestas unos travesaños del segundo tipo a diferentes distancias entre sí. Los valores de medición se transmiten a través de un emisor.
Existe la necesidad de calibrar herramientas de enroscamiento. Esta calibración puede consistir en determinar y en caso dado ajustar el par de torsión en el que reacciona una llave dinamométrica.
Pero también se pueden calibrar herramientas de enroscamiento de funcionamiento dinámico, como destornilladores de impacto o de impulso, en cuyo caso se determina qué par de torsión se ejerce por impulsos sobre una unión por rosca.
El documento DE 35 14 545 da a conocer un dispositivo para calibrar una máquina enroscadora.
Por lo tanto, la invención tiene por objetivo crear un sensor de par de torsión para calibrar herramientas de enroscamiento.
Para ello, un sensor de par de torsión del tipo indicado en la introducción se configura según la invención de tal modo que
(a) el cuerpo anular se mantiene fijo,
(b) el cuerpo interior presenta un alojamiento central, coaxial al eje, para acoplar una herramienta de enroscamiento a comprobar.
Por consiguiente, el sensor de par de torsión no mide el par de torsión transmitido por un eje giratorio o similar, y en consecuencia no está montado de forma fija en el sistema giratorio que transmite el par de torsión. Más bien, el sensor de par de torsión está dispuesto con su cuerpo anular estacionario. Una herramienta de enroscamiento a calibrar se acopla con el cuerpo interior. Después se mide el par de torsión ejercido por la herramienta de enroscamiento sobre el cuerpo interior.
Al calibrar una llave dinamométrica, el par de torsión aplicado se va incrementando hasta que la llave dinamométrica reacciona. Se trata de un proceso dinámico. El par de torsión cuando reacciona la llave dinamométrica se ha de medir con precisión y sin la influencia de fuerzas perturbadoras. Para la calibración de herramientas de enroscamiento de funcionamiento dinámico son especialmente importantes el comportamiento dinámico del sensor de par de torsión y la supresión de fuerzas perturbadoras.
Para suprimir estas fuerzas perturbadoras, de acuerdo con un perfeccionamiento de la invención
(a) el cuerpo anular está unido con el cuerpo interior mediante una primera cruz de cuatro travesaños del primer tipo desplazadas angularmente entre sí 90º alrededor del eje en cada caso,
(b) el cuerpo anular también está unido con el cuerpo interior mediante una segunda cruz de cuatro travesaños del segundo tipo desplazadas angularmente entre sí 90º alrededor del eje en cada caso,
(c) la segunda cruz está desplazada angularmente 45º alrededor del eje con respecto a la primera cruz,
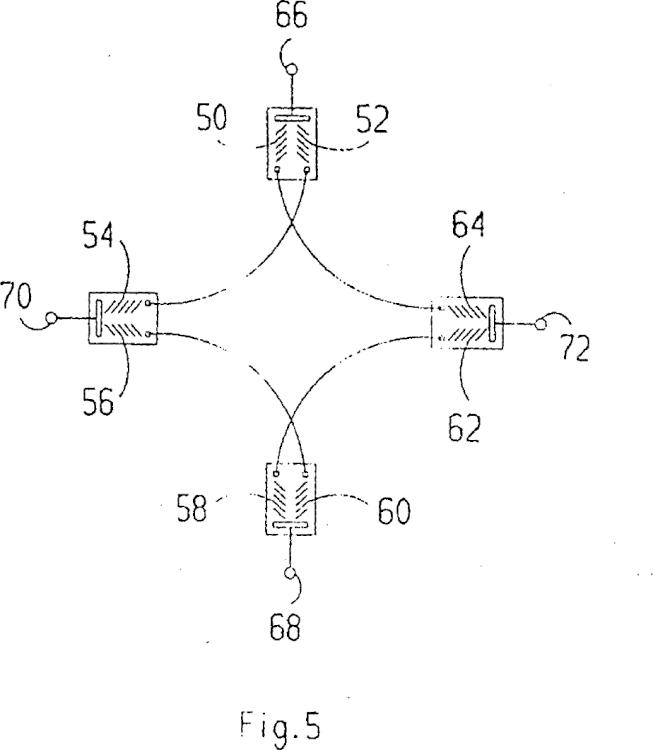
(d) en los cuatro travesaños del primer tipo están dispuestos unos elementos de medición que están interconectados de tal modo que, bajo una compensación de fuerzas perturbadores, se obtiene un valor de medición de un par de torsión que actúa alrededor del eje sobre el cuerpo interior.
En una construcción de este tipo, el sensor de par de torsión está configurado de tal modo que no se puede producir ninguna adulteración del resultado de medición, por ejemplo debida al tipo de acoplamiento o de la aplicación del par de torsión sobre la herramienta de enroscamiento acoplada. Se ha comprobado que de este modo se puede llevar a cabo una medición perfecta del par de torsión alrededor del eje.
Preferentemente, el par de inercia del cuerpo interior es tan pequeño que al calibrar herramientas de enroscamiento de funcionamiento dinámico, tales como destornilladores de impulso, las fuerzas de inercia producidas por el cuerpo interior son despreciables en comparación con las fuerzas que actúan sobre los travesaños.
Esto se puede lograr a través de diferentes medidas. Una medida consiste en que las dimensiones radiales del cuerpo interior sean pequeñas en comparación con las dimensiones radiales del cuerpo anular. Otra medida consiste en que el cuerpo interior sea de un material que tenga poco peso específico en comparación con el material del cuerpo anular. Por último, en el cuerpo interior pueden estar previstas aberturas dispuestas regularmente para reducir el par de inercia.
En una disposición preferente, el cuerpo interior presenta un buje con una abertura cuadrada como alojamiento central para el acoplamiento de una herramienta de enroscamiento a comprobar. Se ha comprobado que si la abertura cuadrada está alineada con las superficies laterales del cuadrado hacia los travesaños del primer tipo y con los cantos hacia los travesaños del segundo tipo, se obtienen resultados de medición óptimos.
A continuación se describen más detalladamente dos ejemplos de realización de la invención con referencia a los dibujos correspondientes.
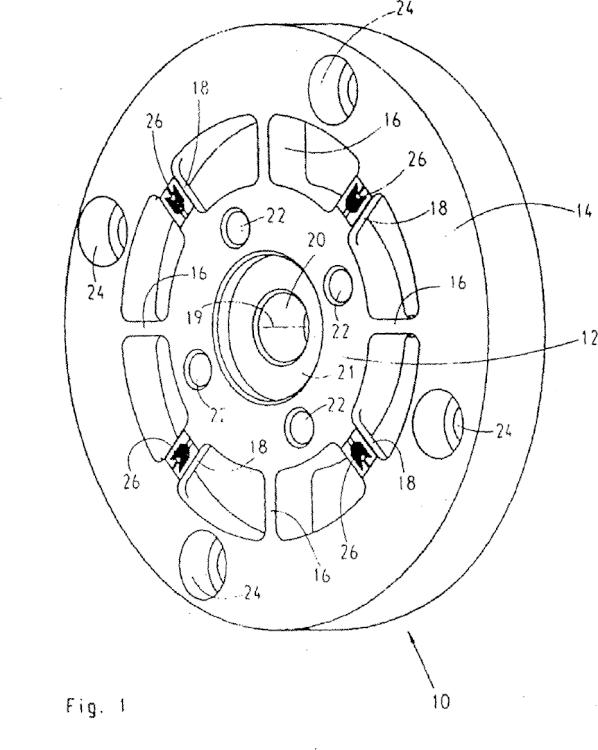
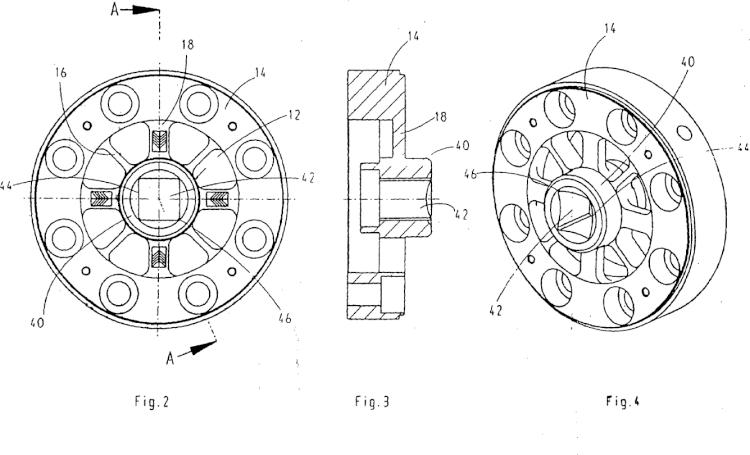
La figura 1 es una representación en perspectiva de un sensor de par de torsión para calibrar herramientas de enroscamiento. La figura 2 muestra una vista frontal de una segunda realización del sensor de par de torsión. La figura 3 muestra una sección a lo largo de la línea A-A de la figura 2. La figura 4 es una vista en perspectiva, similar a la figura 1, de la segunda realización del sensor de par de torsión. La figura 5 muestra la conexión de los elementos de medición.
En la figura 1, el sensor de par de torsión está designado de forma general con el número 10. El sensor de par de torsión 10 incluye un cuerpo interior 12. El cuerpo interior 12 está rodeado de forma concéntrica por un cuerpo anular exterior 14. El cuerpo interior 12 está unido con el cuerpo anular exterior 14 a través de travesaños 18 de un primer tipo y travesaños 16 de un segundo tipo. Los travesaños 18 del primer tipo son anchas en la dirección circunferencial en comparación con los travesaños 16 del segundo tipo. Sin embargo, las dimensiones axiales de los travesaños 18 del primer tipo son pequeñas. Los travesaños 18 consisten prácticamente en placas planas en un plano perpendicular al eje del sensor de par de torsión. Los travesaños 16 del segundo tipo son estrechos en la dirección circunferencial. Sin embargo, las dimensiones axiales de los travesaños 16 son grandes en comparación con los travesaños 18 y se extienden a lo largo de todo el grosor del cuerpo anular exterior 14.
El cuerpo anular exterior se mantiene estacionario. Para ello se fija a un soporte, por ejemplo una pared, mediante pernos roscados (no representados) introducidos a través de unos orificios 24.
Los travesaños 18 absorben esencialmente el par de torsión que actúa en dirección circunferencial alrededor del eje del sensor de par de torsión. Correspondientemente, en los travesaños 18 del primer tipo están instalados los elementos de medición 26 para medir la torsión en forma de bandas extensométricas. Los travesaños... [Seguir leyendo]
Reivindicaciones:
1. Sensor de par de torsión (10) que incluye un cuerpo interior (12) con un eje (19) con respecto al cual se ha de medir un par de torsión, y un cuerpo anular exterior (14) que rodea de forma concéntrica el cuerpo interior (12) y que está unido con éste a través de travesaños radiales (16, 18), estando previstos un primer tipo de travesaño (18) con una anchura relativamente grande en la dirección circunferencial pero con dimensiones axiales relativamente pequeñas y un segundo tipo de travesaño (16) relativamente estrechas en la dirección circunferencial pero con dimensiones axiales relativamente grandes, y estando dispuestos en los travesaños del primer tipo (18) unos elementos de medición (26) para medir la torsión,caracterizado porque para calibrar herramientas de enroscamiento
(a) el cuerpo anular (14) se mantiene fijo y
(b) el cuerpo interior (12) presenta un alojamiento central (20, 21; 40, 42), coaxial al eje (19), para acoplar una herramienta de enroscamiento a comprobar.
2. Sensor de par de torsión según la reivindicación 1, caracterizado porque
(a) el cuerpo anular (14) está unido con el cuerpo interior (12) mediante una primera cruz de cuatro travesaños del primer tipo (18) desplazadas angularmente entre sí 90º alrededor del eje en cada caso,
(b) el cuerpo anular (14) también está unido con el cuerpo interior (12) mediante una segunda cruz de cuatro travesaños del segundo tipo (16) desplazadas angularmente entre sí 90º alrededor del eje en cada caso,
(c) la segunda cruz está desplazada angularmente 45º alrededor del eje (19) con respecto a la primera cruz,
(d) en los cuatro travesaños del primer tipo (18) están dispuestos unos elementos de medición (26) que están interconectados de tal modo que, bajo una compensación de fuerzas perturbadores, se obtiene un valor de medición de un par de torsión que actúa alrededor del eje (19) sobre el cuerpo interior (12).
3. Sensor de par de torsión según la reivindicación 1 o 2, en el que el par de inercia del cuerpo interior (12) es tan pequeño que al calibrar herramientas de enroscamiento de funcionamiento dinámico, tales como destornilladores de impulso, las fuerzas de inercia producidas por el cuerpo interior (12) son despreciables en comparación con las fuerzas que actúan sobre los travesaños (18).
4. Sensor de par de torsión según la reivindicación 3, caracterizado porque las dimensiones radiales del cuerpo interior (12) son pequeñas en comparación con las dimensiones radiales del cuerpo anular (14).
5. Sensor de par de torsión según la reivindicación 3 o 4, caracterizado porque el cuerpo interior (12) es de un material que tiene poco peso específico en comparación con el material del cuerpo anular (14).
6. Sensor de par de torsión según una de las reivindicaciones 3 a 5, caracterizado porque el cuerpo interior (12) presenta una disposición regular de aberturas (22) para reducir el par de inercia.
7. Sensor de par de torsión según una de las reivindicaciones 1 a 6, caracterizado porque el cuerpo interior (12) presenta un buje (40) con una abertura cuadrada (42) como alojamiento central para el acoplamiento de una herramienta de enroscamiento a comprobar.
8,-Sensor de par de torsión según la reivindicación 7, caracterizado porque la abertura cuadrada (42) está aliniada con las superficies laterales (44) del cuadrado hacia los travesaños del primer tipo (18) y con los cantos (46) hacia los travesaños del segundo tipo (16).
Patentes similares o relacionadas:
Sistema, un aparato y un método para instalación de una sujeción asistida por proyección láser, del 3 de Junio de 2020, de THE BOEING COMPANY: Un método que comprende: proyectar, por medio de un aparato de proyección láser , un identificador de un conjunto de instrucciones, siendo proyectado el […]
Aparato de regulación de par, del 18 de Marzo de 2020, de Matatakitoyo Tool Co., LTD: Aparato de ajuste de par para utilizarse en una herramienta de par, que comprende: un cuerpo que comprende: un túnel que se extiende de manera axial […]
Dispositivo tensor para el estiramiento de un perno roscado, del 13 de Noviembre de 2019, de HOHMANN, JORG: Dispositivo tensor para el estiramiento de un perno roscado por tracción en su sección extrema roscada (A) con un tubo de apoyo que rodea la sección extrema roscada (A), […]
Destornillador con combinación y sistema de limitación de par, del 18 de Junio de 2019, de Mercator Innovations BVBA: Un miembro de manguito que comprende: - una porción hueca adaptada para soportar un taladro , - una unidad de montaje de perno o tornillo […]
LIMITADOR DE PAR PARA HERRAMIENTA DE APRIETE, del 14 de Mayo de 2019, de SOCIEDAD LIMITADA DE HERRAMIENTAS ESPECIALES FORZA: 1. Limitador de par para herramienta de apriete, caracterizado porque comprende: - un primer acoplamiento para una herramienta de apriete, - […]
Dispositivo de presión giratorio que permite un control eléctrico y método de control para el mismo, del 17 de Abril de 2019, de Rimscience Co., Ltd: Un dispositivo de presión giratorio controlable eléctricamente, que comprende: un medio de presión giratorio para ser introducido en una estructura […]
Dispositivo para el atornillado y desatornillado de pernos y tornillos por medio de una herramienta de atornillado accionada por motor, del 12 de Abril de 2019, de GEDORE Torque Solutions GmbH: Dispositivo para el atornillado y desatornillado de pernos y tornillos por medio de una herramienta de atornillado accionada por motor, que preferentemente se utiliza […]
Sistema inalámbrico de transmisión y recepción de datos, del 12 de Marzo de 2019, de MAEDA METAL INDUSTRIES, LTD: Un sistema inalámbrico de transmisión y recepción de datos, acoplado a una máquina de apriete que incluye un eje rotatorio y un mecanismo […]