Un dispositivo y un método para estabilizar un objeto metálico.
(17/05/2017) Un dispositivo para estabilizar una tira metálica alargada de material magnético al recubrir la tira con una capa metálica transportando de forma continua la tira a través de un baño de metal fundido, donde está previsto que la tira sea transportada desde el baño en una dirección de transporte a lo largo de un recorrido predeterminado de transporte (x), por lo que el dispositivo incluye un dispositivo limpiador para limpiar metal fundido superfluo de la tira aplicando un flujo de aire en una línea a través del recorrido de transporte (x) de la tira y donde la línea se extiende sobre esencialmente toda la anchura de la tira, donde el dispositivo limpiador incluye al menos un par de cuchillas de aire dispuestas…
Método y aparato para controlar el flujo de acero fundido en un molde.
(14/05/2014) Aparato para controlar un flujo de acero fundido en una máquina de colada continua de planchones, comprendiendo el aparato un molde dispuesto para recibir un flujo de acero fundido, una tobera de inmersión que comprende aberturas de descarga sumergidas en el acero fundido presente en el molde y que suministran el flujo de acero fundido al molde , y medios de control, comprendiendo el aparato:
- medios de adquisición de estado de la colada para adquirir al menos un estado como estado de colada referente a un espesor de producto colado, una anchura de producto colado, una velocidad de colada, una cantidad de gas inerte inyectado en una abertura de salida de acero fundido, y una forma de tobera de inmersión,
- medios de cálculo para…
Método y dispositivo para ajuste y control.
(06/11/2013) Un método para ajustar un controlador que controla una propiedad (p(t)) de un proceso industrial que tieneun caudal de materiales variable, pero conocido, cuyo método comprende:
- la inyección de señales de excitación añadidas a la señal de salida del controlador (U(t)),
- la recepción de medidas (z(t)) de dicha propiedad en respuesta a dichas señales de excitación,
- la selección de una primera estructura de modelo de proceso que comprende uno o varios parámetrosdesconocidos,
- la estimación del valor de dichos uno o más parámetros desconocidos, basándose en dichas medidas (z(t)) dedicha propiedad y en una señal…
Un método y un aparato para medir el espesor de una capa de metal provista sobre un objeto metálico.
(21/06/2013) Un método para medir el espesor de una capa metálica provista sobre un objeto metálico , en el que lacapa metálica tiene una resistividad (ρ1) que difiere de la resistividad (ρ2) del objeto metálico, y el métodocomprende:
generar un campo magnético constante en la proximidad estrecha de la capa metálica,
generar una variación repentina del campo magnético para que se induzca una corriente en la superficie dela capa metálica,
medir los cambios del campo magnético fuera de la capa metálica debido a la corriente inducida durante unperiodo de tiempo que es más largo que el tiempo que la corriente tarda en propagarse a través de la capa metálica,detectar cuándo los valores medidos de los cambios del campo magnético se desvían de valores esperadosde cambios de un campo magnético para…
Dispositivo de control de carga para una grúa.
(19/04/2013) Un dispositivo de control de carga para controlar el movimiento de una carga suspendida de una grúa decontenedores, comprendiendo dicha grúa una carro , un spreader y líneas de carga dispuestas ensuspensión en cuatro puntos (4a - 4d) para elevar una carga, y un sensor óptico para detectar la posición de ladeflexión de un eje ortogonal (X, Y, V) de un contenedor suspendido bajo el spreader, con referencia a una líneacentral imaginaria (XL, YW, VH) de dicho eje ortogonal del contenedor, donde dos o más accionamientos están dispuestos unidos al menos a una línea de carga, y dispuestos para desplazar al menos a uno de dichospuntos (4a - 4d) de suspensión, acercándolo o alejándolo de dicha línea central imaginaria (XL, YW, VH) acortandoy/o alargando al menos una línea de carga, y hay dispuesto…
Método y dispositivo para medir el espesor y la conductividad eléctrica de un objeto de medición.
(21/11/2012) Un metodo para la medicion sin contacto de una dimension y/o una propiedad electrica de un objetoelectricamente conductor que va a medirse usando induccion electromagnetica, y metodo en el que se hace que uncampo electromagnetico penetre a traves del objeto que va a medirse, que comprende las etapas de:
- colocar una bobina transmisora en un lado del objeto que va a medirse,
- colocar una bobina receptora en el otro lado opuesto del objeto que va a medirse,
- generar un campo magnetico en la bobina transmisora
- cambiar repentinamente el campo magnetico generado en la bobina transmisora , y
- detectar la tension (S1) inducida en la bobina receptora , caracterizado por las etapas de:
-…
Método y dispositivo para la medición electromagnética del espesor y la conductividad eléctrica.
(21/11/2012) Un método para la determinación sin contacto de las propiedades buscadas de un objeto que va a medirse talcomo, por ejemplo, su dimensión geométrica o su conductividad eléctrica, usando inducción electromagnética, en elque:
- se genera un campo electromagnético en una bobina transmisora , que se coloca en un lado del objetoque va a medirse ,
- el campo magnético que penetra a través del objeto que va a medirse se detecta mediante una bobinareceptora colocada en el otro lado del objeto que va a medirse,
- se genera una variación en el campo magnético de la bobina transmisora ,
- se detecta una variación de campo en la bobina receptora
caracterizado por
- colocar una bobina de control…
Alojamiento modularizado de motor o generador con barras de fijación de fundición.
(27/06/2012) Sistema de sujeción para alojamiento de motor o generador eléctrico, comprendiendo el sistema de fijación un cuerpo de alojamiento de fundición con una pluralidad de áreas de sujeción fundidas o soldadas, espaciadas 5 sobre la superficie envolvente del cuerpo de alojamiento de fundición, estando las áreas de fijación equipadas con orejetas de fijación, elementos sobresalientes de seguridad, canales para conducto de aire o cajas terminales, en el que las áreas de fijación se extienden axialmente a lo largo de la superficie envolvente del cuerpo de alojamiento de fundición en cualquier trayectoria desde un extremo del cuerpo de alojamiento de fundición hasta el…
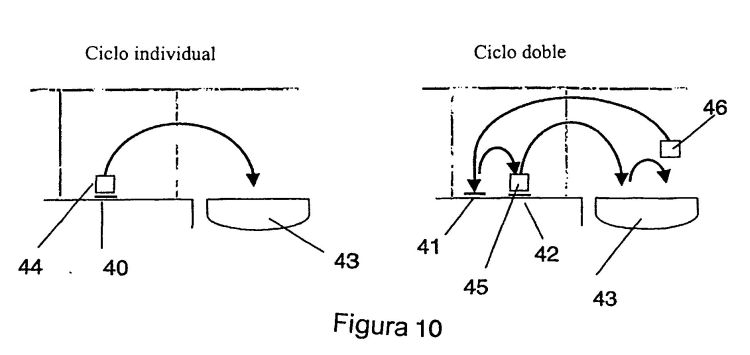
Método de control para máquinas, que incluye un sistema, programa de ordenador, señales de datos e interfaz gráfica de usuario.
(27/03/2012) Un método para controlar una máquina para coger un objeto desde una primera posición y colocar el objeto en una segunda posición (4a, 4b, 4c), donde un miembro sensor proporciona datos sobre dicha primera posición a un miembro de control , caracterizado por -enviar un mensaje desde un proceso maestro del miembro de control que comprende uno o más de dichas primeras posiciones a todas las máquinas controladas por dicho miembro de control, -enviar un mensaje desde dicho miembro de control a todas las máquinas con un miembro indicados que especifica cual de una o más de dichas primeras posiciones deben utilizarse, -recibir un mensaje desde dicha máquina con un estado que indica que dicha primera posición
ha sido utilizada, -enviar un mensaje que comprende dicha primera posición , o más de…
DISPOSITIVO Y PROCEDIMIENTO PARA EL CONTROL DEL FLUJO DE POTENCIA EN UNA LÍNEA DE TRANSMISIÓN.
(12/03/2012) Un dispositivo para el control del flujo de potencia en una línea de transmisión de CA trifásica (L2, La, Lb, Lc) , que comprende para cada una de sus fases (a, b, c) un transformador (12a, 12b, 12c) con un devanado primario (121c) y un devanado secundario (122c) , siendo el objetivo del devanado secundario su conexión en serie en la fase respectiva de la línea de transmisión, y siendo el objetivo del devanado primario suministrársele un voltaje que depende de una parte controlable del voltaje entre las otras dos fases de la línea de transmisión, caracterizado por que el dispositivo comprende, para cada una de las fases de la línea de transmisión, un circuito en serie con un primer terminal (T1a, T1b, T1c) y un segundo terminal (T2a, T2b, T2c) y un punto de conexión (Ja,…
UN MÉTODO Y UN DISPOSITIVO PARA COMPENSACIÓN DEL CONSUMO DE POTENCIA REACTIVA EN UNA CARGA INDUSTRIAL.
(09/03/2012) Un método para la compensación del consumo de potencia reactiva de una carga industrial , preferiblemente un horno de arco eléctrico o una planta para el laminado de materiales metálicos, alimentado desde una red de c.a. eléctrica trifásica (a, b, c), en la que se conectan tanto un primer dispositivo de compensación (3, 3ab, 3bc, 3ca) para el consumo controlable de potencia reactiva como un segundo dispositivo de compensación para la generación de potencia reactiva, a la red de potencia eléctrica en una conexión en paralelo con la carga, comprendiendo el primer dispositivo de compensación un reactor controlado por tiristor para cada una de las fases de la red de c.a., mediante el que se determina el consumo instantáneo de potencia reactiva (Q(t)) por la carga y se forma una orden de control…
MÉTODO Y SISTEMA PARA LA COMPENSACIÓN ADAPTATIVA DE LA DERIVA TÉRMICA DE UN SENSOR.
(23/02/2012) Método para la compensación adaptativa de la deriva térmica de un sensor, diseñado para medir el par de torsión de un árbol o un tren de transmisión o la fuerza en un equipo mecánico, durante el funcionamiento, que comprende las etapas de: - medir de forma recurrente la señal del sensor y determinar una temperatura asociada, - calcular un valor de desviación en función de la temperatura basándose en datos medidos y almacenados, - compensar el valor de la señal medida usando dicho valor de desviación calculado, caracterizado por, - detectar cuándo no está cargado el sensor o prácticamente no cargado y si es así…
MÉTODO Y DISPOSITIVO PARA OPTIMIZAR EL CONTROL DE LA PLANEIDAD EN LA LAMINACIÓN DE UNA BANDA.
(29/12/2011) Método para optimizar el control de la planeidad en la laminación de una banda usando cualquier número de puestos de laminado y actuadores , caracterizado por, - usar un modelo de laminado representado por una matriz de laminado (GM) que contiene información del efecto de planeidad de cada actuador, - traducir el efecto de planeidad de cada actuador en un sistema de coordenadas (u), cuya dimensión es menor o igual que el número de actuadores usados, - monitorizar/muestrear los valores de planeidad reales a través de la banda , - calcular un vector del error/desviación de planeidad (e) como la diferencia entre la planeidad de la banda monitorizada/muestreada y…
SISTEMA DE CONTROL, DISPOSITIVO Y PROCEDIMIENTO PARA REGULAR EL FLUJO DE METAL LÍQUIDO EN UN DISPOSITIVO PARA LA FUNDICIÓN DE UN METAL.
(29/06/2011) Sistema de control para regular el flujo de metal líquido en un dispositivo para la fundición de metal, que comprende medios de detección operativos para medir una característica, tal como, la altura del menisco en al menos dos puntos en el menisco o la temperatura del menisco, de forma instantánea a través de un procedimiento de fundición, y una unidad de control operativa para evaluar los datos de los medios de detección, caracterizado porque dicha unidad de control está dispuesta para utilizar una diferencia entre dichas características del menisco en los al menos dos puntos para obtener una velocidad de flujo de metal fundido en el menisco (vm) y medios para variar de forma automática al menos un parámetro del procedimiento para optimizar las condiciones de fundición,…
ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT.
(28/04/2011) Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, - un primer brazo dispuesto para influenciar la plataforma en un primer desplazamiento, que comprende un primer accionador y tres tirantes , teniendo cada tirante una junta externa conectada a la plataforma y una junta interna conectada al primer accionador, - un segundo brazo dispuesto para influenciar la plataforma en un segundo desplazamiento, que comprende un segundo accionador y dos tirantes teniendo cada tirante una junta externa conectada a la plataforma,…
(25/03/2011) Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir en la plataforma en un primer movimiento e incluyendo un primer accionador con un primer carro linealmente móvil y dos articulaciones , cada una de las cuales incluye una unión exterior (13a, 14a) dispuesta en la plataforma y una unión interior (13b, 14b) dispuesta en el primer carro, donde las dos uniones interiores están dispuestas desplazables en paralelo, un segundo brazo dispuesto para influir en la plataforma en un segundo movimiento e incluyendo un segundo accionador con un segundo carro linealmente móvil y dos articulaciones , cada una de las cuales incluye una unión exterior (15a,16a) dispuesta en la plataforma y una unión interior (15b,16b) dispuesta en el segundo…
METODO Y DISPOSITIVO PARA LA LOCALIZACION DE FALTAS.
(28/09/2010) Método de localización de una falta en una sección de al menos una línea de transmisión que comprende:
- la medición de las tensiones e intensidades en ambos extremos, A y B, de la sección,
- la obtención de los fasores de secuencia positiva de las tensiones VA1, VB1 medidos en los extremos A y B, respectivamente,
- la obtención de los fasores de secuencia positiva de las intensidades IA1, IB1 medidos en los extremos A y B, respectivamente,
- el uso de un esquema del circuito equivalente para las magnitudes de secuencia positiva, obteniendo de ese modo
DISPOSITIVO, METODO Y SISTEMA DE CALIBRACION PARA UNA GRUA DE CONTENEDORES.
(25/08/2010) Un dispositivo de calibración para la calibración automática de una grúa de contenedores, estando dicha grúa de contenedores controlada por un sistema que comprende al menos un primer sensor (LPS) y/o un segundo sensor (TPS), caracterizado por una plataforma de calibración dispuesta en una posición fija y que comprende una pluralidad de marcadores (5a-c, 6a-c), dispuestos cada uno de ellos en una posición fija conocida y a una distancia relativa entre ellos
MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS.
(25/05/2010) Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil , y tres brazos que conectan la plataforma estacionaria con la plataforma móvil , incluyendo el primer brazo una primera parte de brazo y una segunda parte de brazo articulado , incluyendo el segundo brazo una primera parte de brazo y una segunda parte de brazo articulado , e incluyendo cada brazo un accionador a saber, un primer, un segundo y un tercer accionador respectivamente para mover el brazo en relación a la plataforma estacionaria, donde el tercer brazo incluye una sola articulación que conecta el tercer brazo con la plataforma móvil mediante…
UN DETECTOR DE PAR DE TORSION.
(19/05/2010) Un detector magnetoestrictivo para medir un par de torsión en un eje , en el que el detector comprende al menos una región magnetoestrictiva activa en el eje , un patrón de superficie sobre la región magnetoestrictiva , de manera que obtiene propiedades anisotrópicas, un primer medio dispuesto para genera un campo magnético variable con el tiempo en la región magnetoestrictiva y un segundo medio dispuesto para detectar variaciones en la permeabilidad en la región magnetoestrictiva y en el que dicha región magnetoestrictiva comprende una primera capa de un material magnetoestrictivo proporcionado sobre la superficie del eje caracterizado por que dicho patrón de superficie está formado por una segunda capa de un material no magnetoestrictivo…
UN ROBOT INDUSTRIAL CON MEDIOS DETECTORES EN LA REGION DE UNA BRIDA DE HERRAMIENTA.
(25/03/2010) Un robot industrial que tiene una brida de herramienta en el extremo de un brazo externo del robot, teniendo la brida de herramienta medios para fijar una herramienta a la misma y teniendo el robot adicionalmente medios detectores adaptados para detectar fuerzas y/o pares aplicados a una herramienta fijada a dicha brida de herramienta, caracterizado por que la brida de herramienta es integral con un soporte de brida de herramienta en forma de un pasador de eje o similares y por que dicho medio detector comprende al menos un miembro detector incorporado en la brida de herramienta y/o al menos un miembro detector…
METODO Y DISPOSITIVO PARA PROTECCION DE UN SISTEMA ELECTRICO.
(08/03/2010) Método para proteger una zona en un sistema eléctrico, zona que comprende un número de líneas de transmisión conectadas a fuentes eléctricas y un número de líneas de transmisión conectadas a un número de cargas donde las fuentes eléctricas y las cargas se disponen fuera de la zona, comprendiendo el método las etapas de:
- medir continuamente todas las corriente de entrada (I en) a la zona,
- medir continuamente todas las corriente de salida (Isal) de la zona, y
- calcular continuamente la corriente diferencial (I d) de acuerdo con caracterizado por integrar continuamente I en, I sal e I d de acuerdo con donde T es el ciclo de frecuencia fundamental, para obtener valores integrados ID, IEN, ISAL
- diferenciar continuamente los valores I N, I SAL e I D de acuerdo con donde k 1, k 2, k 3 constituyen los valores de…
METODO Y DISPOSITIVO PARA LA LOCALIZACION DE FALTAS.
(17/02/2010) Método para el cálculo de la distancia a una falta en una sección de una red de transporte de energía eléctrica, sección que se dispone con terminales de línea en ambos extremos, comprendiendo cada terminal unos relés de impedancia (AA, AB, BA, BB; 12, 14), que comprenden, en la aparición de una falta:
- la medición de las intensidades del bucle de falta (|I AA_P|, |I BA_P|),
- la determinación de las impedancias aparentes (Z AA_P, Z BA_P) para cada relé,
- la determinación del tipo de falta (ft), caracterizado por las etapas de
- comprobación de si la falta involucra una resistencia de falta de un pequeño valor en comparación con la amplitud de una impedancia de secuencia positiva de la línea completa de acuerdo con…
CONJUNTO DE COMBUSTIBLE PARA UN REACTOR DE AGUA EN EBULLICION.
(09/12/2009) Un conjunto de combustible para un reactor de agua en ebullición, cuyo conjunto de combustible está construido para ser provisto en el reactor de agua en ebullición de tal modo que el conjunto de combustible se extienda en dirección vertical, en donde el conjunto de combustible comprende una pluralidad de barras (3a, 3b, 3c) de combustible que comprenden material de combustible nuclear enriquecido, en donde una parte de dichas barras de combustible son barras (3a, 3c) de combustible de longitud total que se extienden esencialmente desde un primer nivel localizado en una parte inferior del conjunto de combustible hasta esencialmente un segundo nivel localizado en una parte superior del conjunto de combustible, y otra parte de dichas barras de combustible son barras…
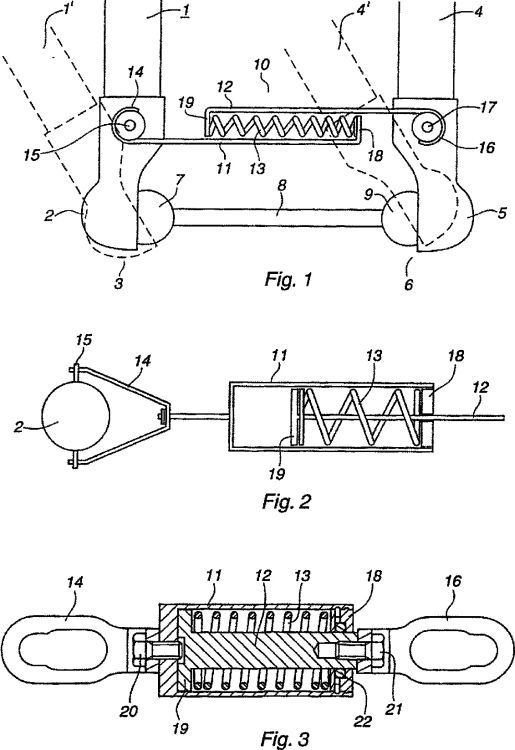
MANIPULADOR QUE COMPRENDE UNA ESTRUCTURA DE PARALELOGRAMO CON UN DISPOSITIVO DE MUELLE QUE EJERCE UNA FUERZA DE TRACCION.
Sección de la CIP Técnicas industriales diversas y transportes
(03/12/2009). Ver ilustración. Inventor/es: PERSSON, FREDRIK, MIKAELSSON, PIERRE, HVITTFELDT, H KAN, LARSSON, JAN. Clasificación: B25J17/02F3, B25J17/02.
Un manipulador que comprende una articulación con al menos dos enlaces en sus extremos, y un dispositivo de muelle que ejerce una fuerza de tracción entre los enlaces, caracterizado porque el dispositivo de muelle comprende un primer dispositivo de estiramiento (119 con un primer dispositivo en ángulo , un segundo dispositivo de estiramiento con un segundo dispositivo en ángulo , que están dispuestos, desplazables en paralelo, lado a lado, y un dispositivo de muelle dispuesto entre los dispositivos en ángulo, resultando la fuerza de tracción por el miembro de muelle que ejerce una fuerza de compresión contra los dispositivos en ángulo, y porque el primer dispositivo de estiramiento comprende una carcasa configurada en forma de manguito y el primer dispositivo en ángulo comprende un miembro extremo asociado con la carcasa, donde la carcasa encierra el miembro de muelle.
DISPOSITIVO Y PROCEDIMIENTO PARA ESTABILIZAR UN OBJETO METALICO.
(19/11/2009) Un dispositivo para estabilizar una tira metálica alargada de material magnético al recubrir la tira con una capa metálica transportando de forma continua la tira a través de un baño de metal fundido, donde está previsto que la tira sea transportada desde el baño en una dirección de transporte a lo largo de un recorrido predeterminado de transporte (x), por lo que el dispositivo incluye un dispositivo limpiador para limpiar metal fundido superfluo de la tira aplicando un flujo de aire en una línea a través del recorrido de transporte (x) de la tira y donde la línea se extiende sobre esencialmente toda la anchura de la tira, donde el dispositivo…
SISTEMA DE CONTROL, PROCEDIMIENTO Y PROGRAMA INFORMATICO PARA SINCRONIZAR UNA PLURALIDAD DE ROBOTS.
(14/08/2009) Un sistema de control para controlar los movimientos de una pluralidad de unidades mecánicas, comprendiendo además el sistema de control: #- un medio de programa que comprende una pluralidad de programas de unidad mecánica, comprendiendo cada programa instrucciones que incluyen instrucciones de movimiento para al menos una de dichas unidades mecánicas, #- una pluralidad de planificadores de trayectoria, estando adaptado cada planificador de trayectoria para recibir instrucciones de al menos uno de dichos programas de unidad mecánica y, basándose en las mismas, determinar cómo la unidad mecánica debe moverse para poder ejecutar la instrucción de movimiento, caracterizado porque al menos uno de dichos planificadores de trayectoria está adaptado para recibir instrucciones de al menos dos de dichos programas de unidad…
SISTEMA PARA ALINEAR UN CHASIS.
Sección de la CIP Técnicas industriales diversas y transportes
(04/08/2009). Ver ilustración. Inventor/es: JOHANSSON,CHRISTER, HEIDENBACK,CLAES. Clasificación: B66C13/46.
Un método para alinear un chasis de camión con una posición requerida con relación a una grúa, en el que el camión es escaneado por unos medios sensores, y para la señalización de una posición del camión a un conductor del camión, caracterizado por las etapas de: #- localizar los medios sensores sobre la grúa de tal manera que serán capaces de escanear al menos una de una pluralidad de pistas de carga y descarga, #- escanear el camión con unos medios sensores, tal como que un escáner láser cuando entre en una de las pistas de carga y descarga, con el fin de detectar/identificar al menos un borde del camión, #- medir con los medios de escáner la distancia entre el borde identificado del camión y un punto fijo sobre la grúa, #- generar una señal que posibilita a un conductor de un camión conducir el camión a una posición requerida en la pista de carga y descarga para recibir o suministrar exactamente un contenedor.
(27/07/2009) Un robot industrial para movimiento de un objeto en un espacio que comprende una plataforma dispuesta para soportar objetos, un primer brazo adaptado para influir sobre la plataforma en un primer movimiento y que comprende un primer actuador con un primer carro móvil linealmente y dos eslabones , cada uno de los cuales comprende una pieza de unión exterior (13a, 14a) dispuesta en la plataforma y una pieza de unión interior (13b, 14b) dispuesta en el primer carro , donde las dos piezas de unión interiores (13b, 14b) están dispuestas de forma desplazable en paralelo, un segundo brazo dispuesto para influir sobre la plataforma…
(16/06/2009) Un robot industrial para mover un objeto en el espacio que comprende una plataforma estacionaria , una plataforma móvil adaptada para soportar el objeto, y un primero (A), un segundo (B) y un tercer brazo (C) a los que están unidas las plataformas, en el que el primer brazo comprende un primer actuador , un primer brazo de soporte influenciado por el primer actuador y giratorio alrededor de un primer eje, y una primera articulación montada sobre el primer brazo de soporte , el segundo brazo comprende un segundo actuador , un segundo brazo de soporte influenciado por el segundo actuador y giratorio alrededor del primer eje, y una segunda articulación montada sobre el segundo brazo de soporte , y el tercer brazo comprende un tercer actuador , un tercer brazo de soporte …
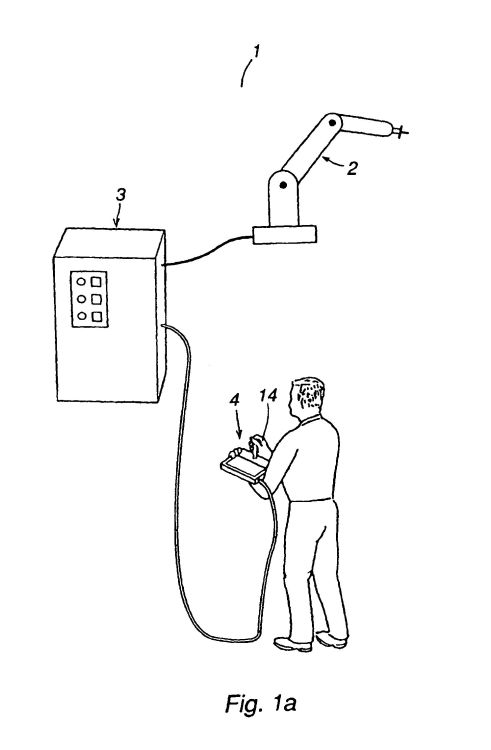
SISTEMA Y PROCEDIMIENTO DE COMUNICACION ENTRE UN ROBOT INDUSTRIAL Y UN DISPOSITIVO DE CONTROL DE OPERADOR PORTATIL (TPU).
Secciones de la CIP Física Técnicas industriales diversas y transportes
(01/05/2009). Ver ilustración. Inventor/es: CARLSON, ERIK, ENDRESEN, JAN, JOHANNESSEN,SVEIN. Clasificación: G05B19/42, B25J13/02.
Un dispositivo de control de operador portátil, TPU, para enseñar y operar manualmente un manipulador en un sistema de robot industrial incluyendo una unidad de control , caracterizado porque el TPU está adaptado para comunicación con la unidad de control mediante un enlace de datos cuando esté colocado dentro de una zona definida, y porque el dispositivo de control de operador incluye medios indicadores dispuestos para indicar un enlace de datos interrumpido mediante realimentación táctil por percepción táctil al cuerpo de un operador que pone el TPU a una posición fuera de la zona definida (A).
APARATO PARA DETERMINAR LA EFICACIA DE UNA DIALISIS.
(01/05/2009) Aparato adaptado para la estimación de una tasa de aclaramiento de cuerpo entero de un tratamiento de diálisis de un paciente , expresando la tasa de aclaramiento de cuerpo entero cómo de bien responde el paciente a una potencial capacidad de limpieza de un dializador que realiza el tratamiento, comprendiendo el aparato : un circuito monitor de urea adaptado para: determinar una concentración de urea inicial en el dializado (Cd0); determinar un caudal total (Qd) de dializado consumido durante el tratamiento incluyendo cualquier ultrafiltración; medir, durante una fase de estado estable (t3 a t4) del tratamiento, una pendiente (Kwb/V) de una función de la velocidad…
{kind=link}
{kind=link}
{kind=link}