70 patentes, modelos y diseños de ABB AB (pag. 2)
UN METODO DE SOLDADURA POR ARCO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/03/2009). Ver ilustración. Inventor/es: KADDANI,AHMED, WINDECKER,ULRIKE, SKARIN,DICK, LEMARINIER,PAVEL, ZAHRAI,SAID, GU,CHUN-YUAN. Clasificación: B23K9/095.
Un método para controlar el equipo de soldadura por arco usado en una operación de soldadura y ajustable variando al menos un valor del parámetro de soldadura que comprende: - determinar dicho al menos un valor del parámetro de soldadura mientras se usa un modelo teórico del proceso de soldadura asociado con la operación de soldadura, - dividir el proceso de soldadura en al menos dos partes separadas de las cuales al menos una parte representa el arco o una parte del mismo, en el modelo teórico, - representar cada una de dichas al menos dos partes del proceso de soldadura y el parámetro/parámetros de soldadura asociados con el mismo mediante un componente del modelo, - poner los componentes del modelo y la fuente de energía del modelo en un modelo de circuito eléctrico y - calcular al menos un valor del parámetro del modelo de circuito eléctrico relacionado con dicho al menos un parámetro de soldadura a partir del modelo de circuito eléctrico.
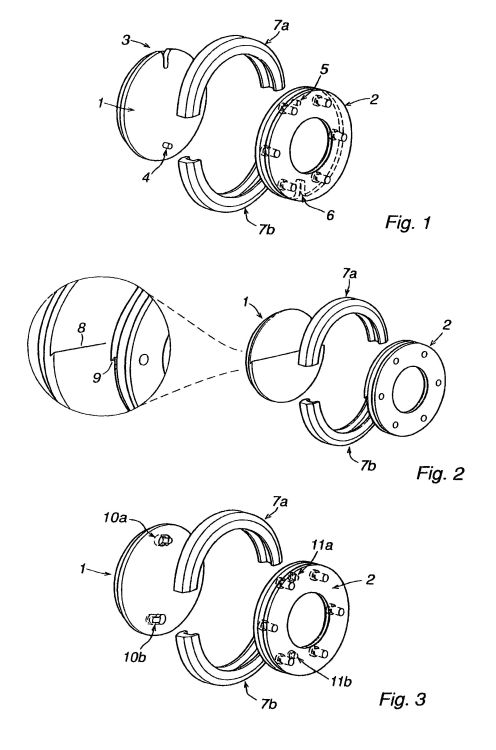
APARATO Y PROCEDIMIENTO QUE PERMITE FIJAR UNA HERRAMIENTA SOBRE UNA PLACA DE FIJACION DE UNA HERRAMIENTA DE UN ROBOT INDUSTRIAL.
Sección de la CIP Técnicas industriales diversas y transportes
(01/02/2009). Ver ilustración. Inventor/es: LINDEVALL,MATTIAS, LUTHARDT,COLIN, ARANIUS,JIMMY. Clasificación: B25J15/04.
Un robot industrial incluyendo un manipulador provisto de una herramienta e incluyendo una pluralidad de brazos, móviles uno con relación a otro, una unión de herramienta , y un acoplamiento que fija la herramienta al manipulador, por lo que la unión de herramienta incluye un elemento de soporte que soporta la herramienta y un elemento de guía para centrar la herramienta durante el montaje, y la herramienta incluye un elemento de soporte y un elemento de guía dispuesto de modo que la unión de herramienta y la herramienta se desplacen, durante el desplazamiento relativo, a la posición de enganche deseada antes de fijarse por el acoplamiento.
Sección de la CIP Electricidad
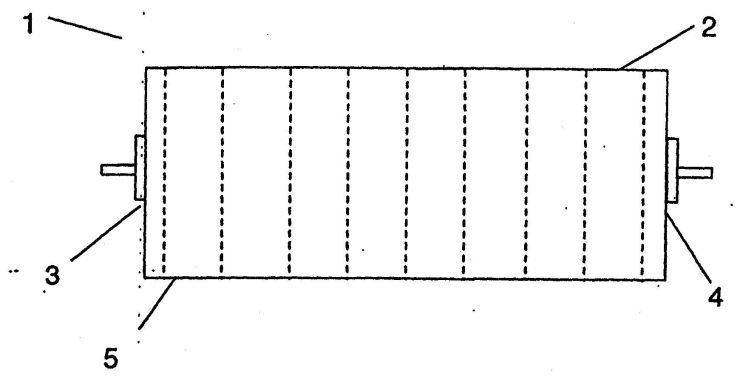
(16/01/2009). Ver ilustración. Inventor/es: ERIKSSON,ESBJIRN, DRUGGE,BIRGER, HOLMGREN,TOMMY, FRISK,GIRAN. Clasificación: H01G2/10.
Un condensador de potencia para alto voltaje incluyendo al menos un elemento condensador (2a-2d) encerrado en una caja , donde cada elemento condensador tiene una forma sustancialmente circular-cilíndrica y el interior de la caja tiene una forma sustancialmente circular-cilíndrica correspondiente con el fin de rodear estrechamente cada elemento condensador (2a-2d), cada elemento condensador está orientado con la dirección axial coincidiendo con la dirección axial de la caja, siendo la caja de material aislante eléctrico y estando provista de un terminal de conexión eléctrica dispuesto en cada extremo de la caja , por lo que la caja propiamente dicha constituye aislamiento entre los terminales de conexión, y cada elemento condensador (2a-2d) tiene un canal central que se extiende a través de él en dirección axial, formando conjuntamente los canales pasantes de los elementos un canal pasante entre los dos extremos de la caja.
PARTE DE BRAZO DE UN ROBOT ASI COMO UN ROBOT INDUSTRIAL PROVISTO DE TAL PARTE DE BRAZO.
(16/12/2008) Una parte de brazo de un manipulador de un robot industrial que tiene en cada uno de sus extremos unos medios para conectar la parte de brazo a un engranaje y medios para reforzar la región extrema de la parte de brazo, en la que en al menos uno de dichos extremos de la parte de brazo, al menos una parte de dichos medios de conexión está localizada más próxima a la periferia de la parte de brazo que dichos medios de refuerzo rodeando al mismo tiempo al menos parcialmente los medios de refuerzo como se ve en la dirección del eje de rotación de dicho engranaje, en el que dichos medios de conexión comprenden taladros pasantes dispuestos en una porción de brazo plana para conectar…
Sección de la CIP Técnicas industriales diversas y transportes
(16/12/2008). Ver ilustración. Inventor/es: BROGARDH, TORGNY, KOCK,SONKE, OESTERLEIN,ROLAND. Clasificación: B25J18/00, B25J9/06, B25J9/02.
Un robot industrial incluyendo un manipulador cinemático paralelo para movimiento de un objeto (7a) en el espacio, donde el manipulador incluye una plataforma estacionaria , una plataforma móvil para transportar el objeto (7a) y al menos tres brazos que conectan las plataformas , donde cada uno de los al menos tres brazos incluye una primera parte de brazo conectada a la plataforma estacionaria para rotación sinfín alrededor de un eje (A, E, F, G) y una segunda parte de brazo incluyendo una disposición de articulaciones dispuesta para conectarse con la plataforma móvil y para transmitir solamente fuerzas axiales a la plataforma móvil , caracterizado porque los ejes de los al menos tres brazos están dispuestos en paralelo o coinciden.
METODO Y SISTEMA PARA LA PROGRAMACION FUERA DE LINEA DE MULTIPLES ROBOTS INTERACTUANTES.
(01/11/2008) Un sistema para la programación fuera de línea de múltiples robots interactuantes , que comprende: al menos un robot de manipulación que sujeta una pieza y al menos robot de tratamiento que tiene una herramienta para tratar la pieza, un ordenador para la programación fuera de línea y la verificación de los códigos de programa para múltiples robots interactuantes, en el que el ordenador está adaptado para: definir una celda de robots virtual que incluya el robot de manipulación, el robot de tratamiento y la pieza, Incorporar parámetros definidos como restricciones que deben ser tomados en consideración en el control de los múltiples robots, crear al menos un trayecto de robot en relación con las características geométricas de la citada pieza definidas en la celda de robots virtual en base a una trayectoria…
MANIPULADOR CINEMATICO PARALELO PARA ESPACIOS DE TRABAJO GRANDES.
(01/08/2008) Un robot industrial para el movimiento de un objeto en el espacio que comprende: - una plataforma dispuesta para portar el objeto, - un primer brazo dispuesto para influenciar la plataforma en un primer movimiento y que comprende un primer actuador que tiene una primera vía y un primer carro desplazable linealmente a lo largo de la primera vía, y un primer y un segundo enlaces, comprendiendo cada enlace una junta externa (11b, 12b) conectada con la plataforma y una junta interna (1la, 12a) conectada con el primer carro, - un segundo brazo dispuesto para influenciar la plataforma en un segundo movimiento, que comprende un segundo actuador…
(01/07/2008) Un dispositivo para el control de un pararrayos conectado a una red eléctrica, comprendiendo una unidad de registro y medios para la fijación de la unidad de registro al pararrayos, comprendiendo la unidad de registro una línea de tierra , que se conecta o está dirigida a conectarse a tierra y que se dirige a conectarse conductivamente con el pararrayos cuando la unidad de registro se fija al pararrayos de forma que la intensidad que circula a través del pararrayos pasará a través de esta línea de tierra , medios para el registro de la intensidad que pasa a través de la línea de tierra desde el pararrayos, un elemento para el registro, basándose en los registros de la intensidad que pasa a través…
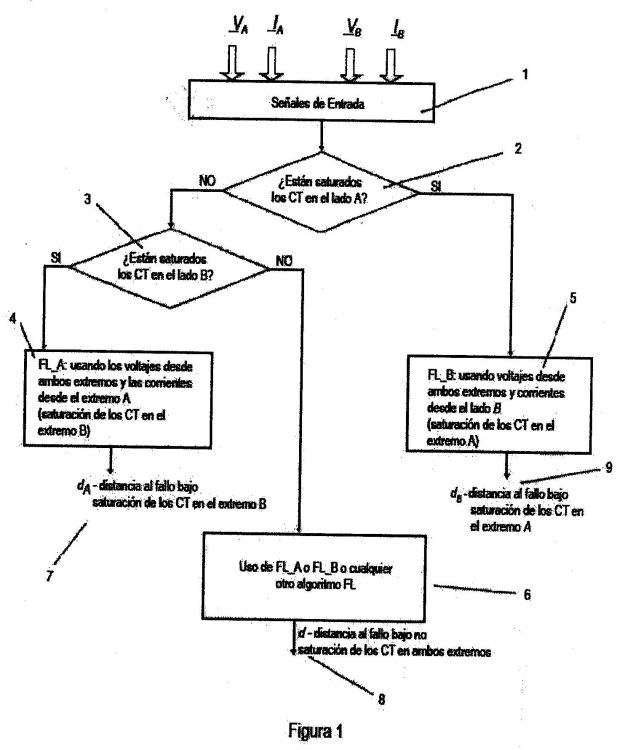
LOCALIZACION DE FALLOS USANDO MEDICIONES DE DOS EXTREMOS DE UNA LINEA.
Sección de la CIP Física
(16/06/2008). Ver ilustración. Inventor/es: IZYKOWSKI, JAN, ROSOLOWSKI, EUGENIUSZ, SAHA,MURARI,MOHAN. Clasificación: G01R31/08.
Un método para localizar un fallo en una sección de una línea de transmisión usando mediciones de corriente y voltaje en un primer extremo (A) y un segundo extremo (B) de dicha sección, caracterizado porque después de producirse el fallo a lo largo de la sección se realizan las siguientes etapas: * recibir los voltajes de fase posteriores al fallo (VA, VB) y las corrientes de fase posteriores al fallo (IA, IB) desde cada uno de dichos extremos primero (A) y segundo (B). * determinar si está saturado un transformador de corriente en dicho primer extremo (A), * determinar si está saturado un transformador de corriente en dicho segundo extremo (B). * calcular una distancia (dA, dB) a dicho fallo usando dichos voltajes de fase posteriores al fallo (VA, VB) y usando sólo las corrientes posteriores al fallo (IA, o IB) desde uno de dichos extremos primero (A) o segundo (B) donde no está saturado ningún transformador de corriente.
METODO Y DISPOSITIVO PARA LOCALIZACION DE FALLOS EN REDES DE DISTRIBUCION.
(01/06/2008) Método para la localización de un fallo que ha ocurrido en una pluralidad de líneas en una red de distribución de energía, donde la localización se determina con ayuda de los valores medidos de la tensión de suministro habitual de dicha pluralidad de líneas y las corrientes de dicha pluralidad de líneas después de la aparición de un fallo; calculando la impedancia de secuencia positiva Z f1k y la impedancia de secuencia cero Z f0k de la red en un estado estacionario antes del fallo para todos los M nodos basándose en el conocimiento de la configuración y topología de la red y obteniendo mediante un sistema de protección superordenado, cuál de dicha pluralidad de líneas se ha hecho defectuosa y qué fallo ha ocurrido, caracterizado por las etapas de: calcular la impedancia equivalente Zek…
DISPOSITIVO PARA CONTROLAR UN CAMPO ELECTRICO CON TENSION CONTINUA.
(16/05/2008) Un dispositivo de control de campo eléctrico CC prefabricado para un cable CC de alto voltaje incluyendo un conductor en tensión interior , un aislamiento , y una capa conductora exterior dispuesta con un extremo que termina a distancia de un extremo del aislamiento formando por ello una región a lo largo del cable donde el aislamiento está expuesto, el dispositivo de control de campo incluye una combinación de control de campo resistivo y control de campo geométrico, donde el control de campo resistivo incluye al menos una capa resistiva dispuesta a lo largo del cable de tal manera que se extienda a lo largo de la capa conductora y más allá de dicho extremo de la capa conductora, capa resistiva…
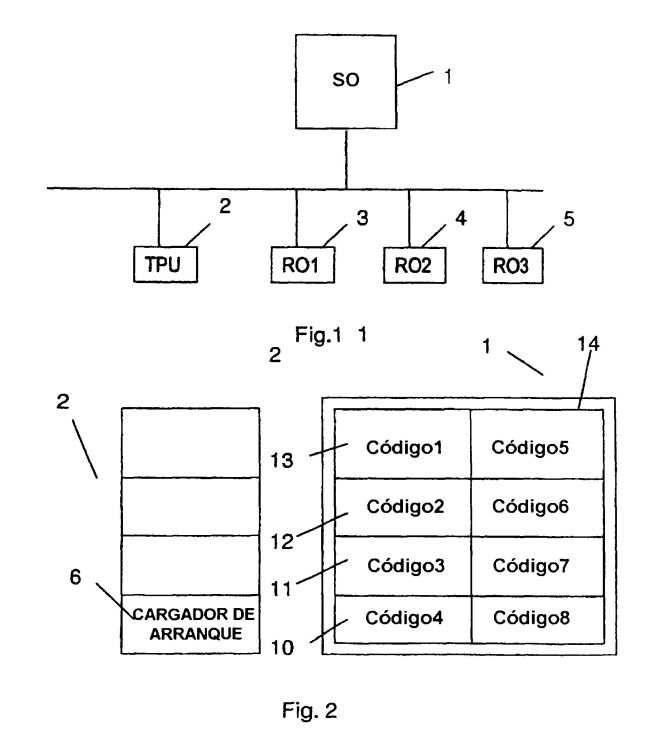
SISTEMA DE CONTROL, PROCEDIMIENTO Y PROGRAMA INFORMATICO.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(16/05/2008). Ver ilustración. Inventor/es: MUSTAPIC,GORAN, SJOBERG,RALPH. Clasificación: G05B19/418, B25J9/16.
Un sistema de control para al menos un manipulador , en donde el sistema de control comprende una memoria de programa para el almacenamiento de código de programación para el manipulador y medios para comunicar con una interfaz hombre-máquina , que comprende una memoria de programa , para almacenar código de programación para manipular el manipulador, caracterizado porque el sistema de control se dota de medios para enviar información a la interfaz hombre-máquina relativa a la versión correcta de dicho código de programación para el manipulador y medios para transferir dicho código de programa a la interfaz hombre-máquina si se necesita una nueva versión del código de programación.
SISTEMA Y METODO PARA LA DETERMINACION DE LA DISTANCIA ENTRE UNA PARTE MOVIL DE UNA GRUA Y UNA MARCA EN EL SUELO PARA UN CONTENEDOR.
(01/05/2008) Un sistema para determinar la posición de un sitio marcado en el suelo de un contenedor con relación a una parte móvil de una grúa, comprendiendo dicho sistema un sitio marcado en el suelo que tiene una posición definida sobre una superficie sustancialmente horizontal, comprendiendo además dicho sistema al menos un marcador de referencia , caracterizado porque el al menos un marcador de referencia es un marcador de referencia para el sitio marcado en el suelo, en que el marcador de referencia comprende una placa alargada sustancialmente rectangular dispuesta perpendicular a la superficie sustancialmente horizontal, en el que la placa alargada sustancialmente rectangular tiene bordes que definen al menos una superficie plana alargada dispuesta en una…
DISPOSITIVO DE ROBOT INDUSTRIAL.
(01/05/2008) Un robot industrial según el concepto delta con un sistema de brazos previsto para rotación en el espacio que incluye una sección de base , una chapa móvil , varios puntales articulados y un eje telescópico dispuesto entre la sección de base y la chapa móvil, en el que extremos opuestos de los puntales y el eje telescópico están conectados a la sección de base y a la chapa móvil, respectivamente, en el que el eje telescópico incluye un primer brazo telescópico y un segundo brazo telescópico que están dispuestos longitudinalmente desplazables uno con relación a otro, caracterizado porque el primer brazo telescópico incluye al menos dos vástagos , un soporte interior , al que los extremos interiores de los vástagos están unidos fijamente, y un soporte exterior al que los extremos exteriores de los vástagos…
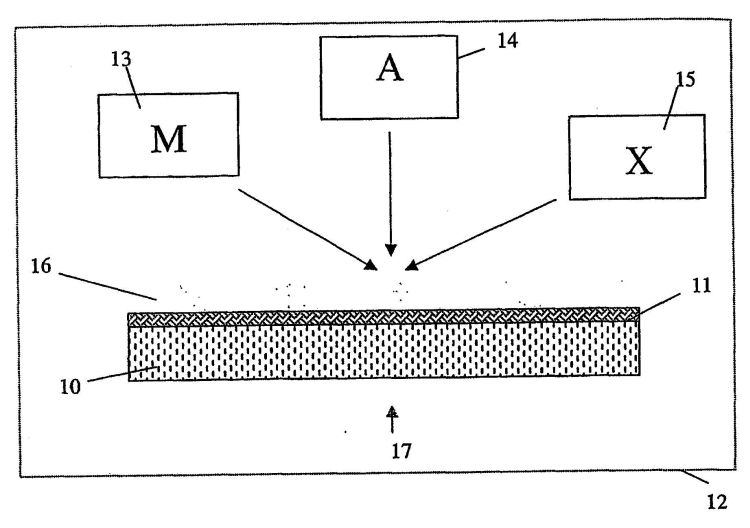
METODO DE SINTESIS DE UN COMPUESTO DE FORMULA MN+1AXN, PELICULA DEL COMPUESTO Y SU USO.
Sección de la CIP Química y metalurgia
(01/05/2008). Ver ilustración. Inventor/es: ISBERG,PETER, PALMQUIST,JENS-PETTER, JANSSON,ULF,UPPSALA UNIVERSITET, HULTMAN,LARS, BIRCH,JENS, SEPPANEN,TIMO. Clasificación: C30B23/02, C23C14/06, C30B28/12, C30B29/10.
Un método para sintetizar o desarrollar un compuesto que tiene la fórmula general Mn+1AXn donde M es al menos un metal de transición, n es 1, 2, 3 o mayor, A es al menos un elemento del grupo A y X es carbono, nitrógeno o ambos, en el que el método comprende la etapa de exponer un sustrato a los componentes vaporizados desde al menos una fuente sólida con lo que dichos componentes, o dichos componentes en combinación con al menos un componente gaseoso, reaccionan entre sí para producir el compuesto Mn+1AXn , caracterizado porque el sustrato comprende una capa de siembra , sobre la que el compuesto Mn+1AXn se sintetiza o se desarrolla, que se produce ex situ, in situ o mediante una combinación de ambas etapas ex situ e in situ.
LOCALIZACION DE FALTAS UTILIZANDO MEDICIONES DE LA INTENSIDAD Y LA TENSION EN LOS TERMINALES DE UNA LINEA.
(16/04/2008) Un método para localizar una falta desde un extremo de una sección de líneas eléctricas en paralelo (A-B) por medio de mediciones de intensidad, tensión y ángulos entre las fases en un primer extremo (A) de dicha sección, comprendiendo adicionalmente dicho método: ¿ cálculo de las componentes simétricas de las intensidades para dichas mediciones de tensión e intensidad y dicho primer extremo (A), ¿ cálculo de un valor de la impedancia para un enlace extra entre los terminales (A, B) con la impedancia para la secuencia positiva igual a: (Ver fórmula) donde: Z1AB = impedancia para la secuencia positiva del enlace extra, Z1LA = impedancia para la secuencia positiva de la línea sana de la sección de líneas…
OPTIMIZACION DINAMICA EN LINEA DE PROCESOS DE PRODUCCION.
(01/04/2008) Método para un proceso de producción que tiene un número de secciones de proceso (10A-D; 60A-I), que comprende las etapas de: obtener un modelo de proceso dinámico que tiene relaciones entre variables manipuladas y variables de salida del proceso ; proporcionar limitaciones externas para dicho proceso de producción ; medir un conjunto de variables de salida de dicho proceso de producción; definir dicha función objetiva; optimizar dicha función objetiva; y accionar dicho proceso de producción ajustando las variables manipuladas; caracterizado porque dicho modelo de proceso dinámico incluye relaciones dependientes del tiempo entre las variables manipuladas para dichas secciones de proceso…
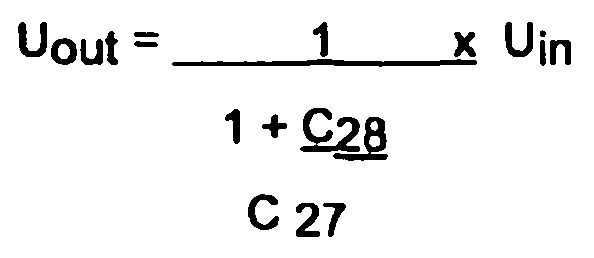
METODO PARA COMPENSAR LA INTENSIDAD Y DISPOSITIVO PARA PROTEGER UN SISTEMA ELECTRICO.
(01/04/2008) Método para compensar la intensidad de un sistema de protección para proteger una zona en un sistema eléctrico, comprendiendo dicha zona un número de líneas de transmisión conectadas a generadores y un número de líneas de transmisión conectadas a un número de cargas donde los generadores y las cargas están dispuestos fuera de la zona y un número de transformadores de intensidad (TI) dispuestos en las líneas de transmisión, en el que el método comprende las etapas de: - medir continuamente todas las intensidades entrantes (Iin) a la zona, - medir continuamente todas las intensidades salientes (Iout) de la zona, - calcular continuamente la intensidad diferencial (Id) de acuerdo con Id = Iin - Iout, caracterizado por - calcular continuamente q = Iout/Iin, y - comparar continuamente q con un valor de ajuste, - comparar…
METODO Y APARATO PARA VACIADO CONTINUO.
(01/11/2007) Un aparato para vaciado continuo de metales, incluyendo un molde de vaciado con una sección transversal horizontal alargada, a través de la que se ha previsto que pase un metal fundido durante el proceso de vaciado, un elemento para suministrar un metal fundido a dicho metal fundido ya presente en el molde de vaciado en una región a una distancia debajo de la superficie superior de la última masa fundida, y un dispositivo adaptado para aplicar campos magnéticos a la masa fundida en el molde de vaciado para influir en movimientos del metal fundido, donde el dispositivo exhibe elementos adaptados para generar un campo magnético estacionario con una intensidad variable a través de esencialmente…
RECTIFICACION DIGITAL SENSIBLE A LA FASE DE SEÑALES DE TRANSDUCTORES EXCITADOS POR CORRIENTE ALTERNA.
(16/10/2007) Un método para procesar señales desde un transductor excitado por una señal de excitación de corriente alterna, cuyo transductor produce como salida una señal modulada en amplitud que contiene la cantidad a medir, caracterizado por las etapas de generar una primera señal de reloj de frecuencia n.f para el muestreo de la señal del transductor y sincronizada con dicha señal de excitación, generar una segunda señal de reloj de frecuencia f sincronizada con la señal de excitación, muestrear la señal de salida del transductor a una frecuencia n.f controlada por dicha señal primera de reloj, producir promedios de medio periodo por…
RODILLO DE TRANSFERENCIA.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes Física
(16/09/2007). Ver ilustración. Inventor/es: JOHANSSON, DAN, GUSTAFSSON, PAR, INGVARSSON,KJELL, OLSSON,ULF. Clasificación: F16C13/00, B65H27/00, B21B39/00, B23K9/00, B65H23/04, B21B38/02, B65G39/04, G01B5/207.
Un rodillo de transferencia para transportar una tira de material sustancialmente plano, rodillo de transferencia que incluye una envuelta cilíndrica exterior , incluyendo al menos dos elementos cilíndricos (8a, 8b) unidos conjuntamente, una junta mecánica une conjuntamente los elementos cilíndricos (8a, 8b), caracterizado por el hecho de que entre los dos elementos cilíndricos (8a, 8b) se ha dispuesto unos medios para proporcionar una región de rigidez mecánica predeterminada y reducida con relación a la rigidez del resto de la envuelta cilíndrica , y porque dicha junta es una junta soldada.
PROCEDIMIENTO FABRICACION DE UN VARISTOR A BASE DE OXIDO METALICO.
(16/06/2007) Un método de fabricación un varistor cilíndrico de óxido metálico con capacidad de absorción de energía mejorada, en el que los electrodos se colocan haciendo contacto con las superficies finales del varistor de óxido metálico, las superficies finales del varistor se recubren con metal, y la superficie de envoltura se suministra con un material de alta resistencia para formar una zona con resistividad potenciada cerca de la superficie de envoltura, comprendiendo el método las etapas de: - formar un polvo de óxido metálico en un cuerpo cilíndrico de varistor comprimido, pero no sinterizado, - recubrir las superficies de envoltura del cuerpo de varistor comprimido, pero no sinterizado, con una pasta o una dispersión de un material de alta resistencia en forma de SiO2, LiO2 o Cr2O3 o sales de…
UN METODO Y UNA PLANTA DE MONTAJE.
(16/03/2007) En una planta de montaje con al menos un robot industrial, un método para montar una carrocería de vehículo o al menos una parte de la misma, llevando los componentes de la carrocería del vehículo, para la formación de la carrocería de vehículo o sus partes, a posiciones predeterminadas unas respecto a otras, uniéndose juntos allí, caracterizada porque un primer componente de carrocería se sitúa, colocado y fijado en un primer dispositivo de retención ; porque el dispositivo de retención con el primer componente de la carrocería se mueve mediante un primer robot industrial a un dispositivo estacionario de colocación y fijación (5, 6, 7, respectivamente) y se coloca y se fija en relación con el mismo; porque un componente de carrocería adicional se mueve al dispositivo de colocación y fijación y se…
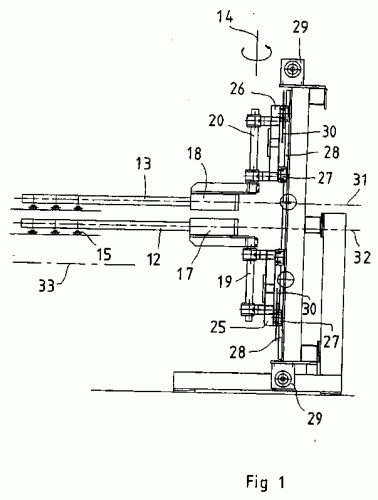
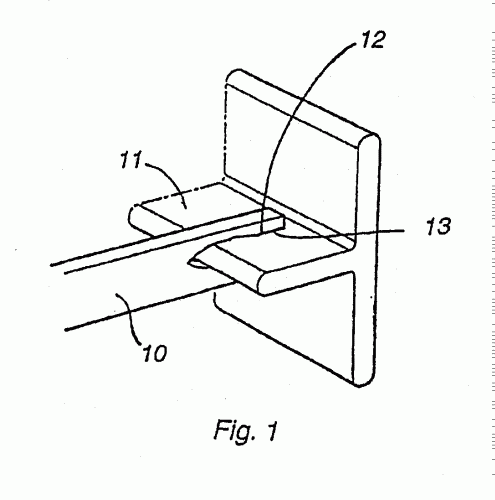
DISPOSITIVO DE ALIMENTACION Y METODO DE ALIMENTACION.
Sección de la CIP Técnicas industriales diversas y transportes
(16/01/2007). Ver ilustración. Inventor/es: ERIKSSON, BENGT, BENGISSON, BRODDE. Clasificación: B65H3/08, B65H5/10, B25J18/00.
Un dispositivo de alimentación de hojas, para el desplazamiento individual de hojas metálicas de una pila de hojas a un lugar de deposición , incluyendo un primer y un segundo brazo provisto cada uno de un elemento de agarre que está diseñado para agarrar y sujetar individualmente la hoja , caracterizado porque los brazos están dispuestos extendiéndose de y estando dispuestos para movimiento pivotante al lugar de deposición, y de vuelta, alrededor de un eje de pivote común sustancialmente vertical ; porque los brazos se pueden mover a lo largo en la dirección vertical a posiciones para depositar una hoja, a posiciones para tomar una hoja, y a posiciones donde un brazo se puede pivotar pasando sobre el otro para la toma alterna de hojas de dos pilas diferentes de hojas a alimentar.
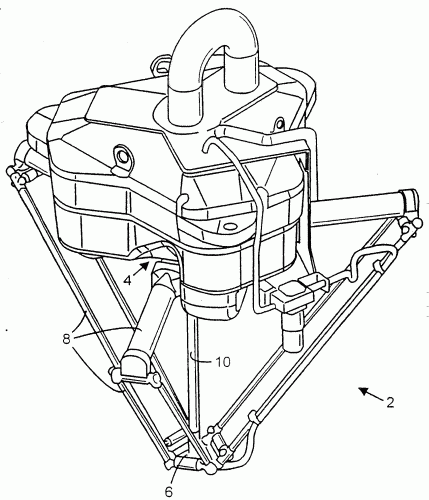
DISPOSITIVO PARA EL DESPLAZAMIENTO RELATIVO DE DOS ELEMENTOS.
(01/11/2006) Un dispositivo para el desplazamiento relativo de dos elementos que comprende un arreglo de enlace (5q; 5r) y un arreglo de desplazamiento (6q; 6r) conectado con el arreglo de enlace (5q; 5r), estando proporcionado el arreglo de desplazamiento (6q; 6r) entre el arreglo de enlace (5q; 5r) y el primero (1q; 1r) de los elementos mientras el arreglo de enlace (5q; 5r) está proporcionado entre el arreglo de desplazamiento y el segundo (2q; 2r) de los elementos, estando formado el segundo elemento por el elemento portador ó funcional (3q; 3r), el arreglo de enlace (5q; 5r) que comprende por lo menos tres enlaces (9q, 14q; 94, 14r) está contactado de manera giratoria a través de las juntas en relación con el arreglo de desplazamiento (6q; 6r) y el segundo elemento (2q; 2r), estando conectados los citados enlaces (9q,…
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes
(16/09/2006). Ver ilustración. Inventor/es: PERSSON, FREDRIK, MIKAELSSON, PIERRE, HVITTFELDT, H KAN, LARSSON, JAN. Clasificación: F16C11/06, B25J17/02.
Dispositivo de robot que incluye por lo menos un dispositivo de enlace en el que las varillas de freno están dispuestas en un sistema de juntas múltiples donde las juntas incluyen juntas de rótula y casquillo de tres ejes que comprenden un casquillo que encierra una rótula con un espacio que comprende la mitad de una esfera ó menos caracterizado por el hecho de que el cojinete radial de bolas está sujeto para que no gire dentro de la carcasa en el casquillo de la junta y donde la carcasa incluye una superficie en cuya proximidad está situado el cojinete radial de bolas y que la superficie está diseñada con medios que aumentan la fricción.
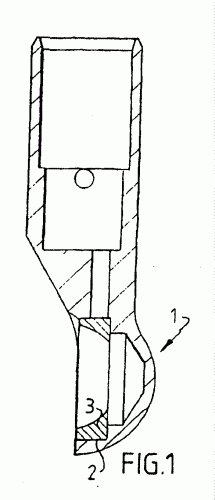
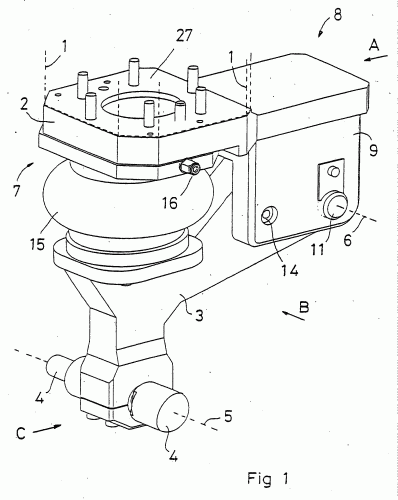
ELEMENTO DE CONTACTO ELECTRICO Y UTILIZACION DEL ELEMENTO DE CONTACTO.
Sección de la CIP Electricidad
(01/05/2006). Ver ilustración. Inventor/es: ARNELL, SYLVA, STRIDH, BENGT. Clasificación: H01R4/28.
Un elemento de contacto eléctrico destinado a conectar eléctricamente un dispositivo eléctrico y proporcionar la transmisión de corriente en un circuito eléctrico, de tal manera que el elemento de contacto eléctrico comprende un cuerpo metálico, y en el cual al menos una superficie de contacto , presente sobre el cuerpo metálico, está completa o parcialmente revestida de una capa reductora del rozamiento, caracterizado por que la capa reductora del rozamiento comprende una sal metálica y por que el cuerpo metálico está al menos parcialmente revestido de una capa de un material con base de plata, de tal modo que la capa de material de base de plata está dispuesta entre el cuerpo metálico y la capa reductora del rozamiento.
ROBOT INDUSTRIAL SEGUN EL CONCEPTO DELTA CON UN EJE TELESCOPICO ROTATIVO.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes
(16/04/2006). Ver ilustración. Inventor/es: PERSSON, FREDRIK, MIKAELSSON, PIERRE, HVITTFELDT, H KAN, LARSSON, JAN. Clasificación: F16B7/10, B25J18/02.
Robot industrial según el concepto delta con un sistema de brazo destinado a girar en el espacio, incluyendo una sección de base , una placa móvil , varias varillas de tracción de articulaciones múltiples y un eje telescópico dispuesto entre la sección de base y la placa móvil, donde extremos opuestos de las varillas de tracción y el eje telescópico están conectados con la sección de base y la placa móvil respectivamente, y donde el eje telescópico incluye un eje interior y un tubo externo dispuesto en el eje interior y desplazable con relación al eje interior en una dirección longitudinal, caracterizado porque un casquillo torsional rígido está dispuesto de forma estacionaria en el tubo exterior en el que el eje interior está montado de manera que se pueda desplazar.
DISPOSITIVO Y PROCEDIMIENTO DE ESTABILIZACION DE UNA CINTA O UN FILAMENTO DE MATERIAL DE FERROMAGNETICO QUE SE DESPLAZA EN UNA DIRECCION.
(16/04/2006) Un dispositivo para estabilizar un objeto metálico alargado de material magnético, estando destinado el objeto metálico a transportarse a lo largo de un recorrido de transporte situado en un plano (x), que incluye una dirección de transporte y es sustancialmente paralelo a la dirección longitudinal del objeto en dicho recorrido, donde el dispositivo incluye un accionador electromagnético sustancialmente estacionario dispuesto para aplicar una fuerza magnética al objeto e incluye al menos un primer elemento de accionamiento , que incluye un devanado (11') y está dispuesto en un primer lado del plano (x) y a una distancia determinada del plano (x), y un segundo elemento de accionamiento ,…
Sección de la CIP Técnicas industriales diversas y transportes
(16/11/2005). Ver ilustración. Inventor/es: PERSSON, JAN. Clasificación: B21D39/02.
Un procedimiento para plegar una pieza de trabajo , que comprende los pasos de proporcionar un rodillo de plegar que define una primera trayectoria a lo largo de una porción de borde de la pieza de trabajo y registrar esta trayectoria en medios de ordenador de medios de dispositivo de movimiento; aplicar una fuerza de empuje elástica al rodillo de plegar mediante medios de dispositivo de movimiento para mover el rodillo de plegar contra la pieza de trabajo a lo largo de la porción de borde de la pieza de trabajo; definir una segunda trayectoria a lo largo de una línea de circunferencia en el rodillo de plegar , caracterizado por los pasos de detectar la fuerza de empuje elástica mediante unos medios de sensor; generar una señal de salida desde los medios de sensor en respuesta a la fuerza de empuje elástica detectada; e introducir la señal de salida en los medios de dispositivo de movimiento para mantener las trayectorias primera y segunda en una relación predeterminada entre sí.
LOCALIZACION DE UNA AVERIA EN UNA LINEA DE ALTA TENSION COMPESADA EN SERIE.
(16/11/2005) Un método para localización de un fallo, y determinación de la resistencia de fallo resultante, que se ha producido en una línea de transmisión de energía eléctrica que está compensada en serie con un condensador, con un dispositivo de protección contra sobrevoltajes conectado en paralelo, entre dos estaciones (A) y (B), donde la distancia al fallo desde una estación (A) y la resistencia de fallo se determinan por medio de valores de voltaje y corriente, medidos en dicha estación (A), antes y después de la aparición del fallo, caracterizado porque, si el fallo se produjo entre los condensadores en serie y la estación B, la distancia al fallo se determina por donde Im(a1), Im(b1) och Im(c1) son iguales a la parte imaginaria de los coeficientes, que es la solución a una primera ecuación de distancia…
SISTMA DE CONTROL QUE PERMITE CONTROLAR UN EQUIPO OPERACIONAL.
(01/03/2005) Un sistema de control que incluye un sistema maestro , equipo operacional y los medios de la memoria adaptados para almacenar los datos que comprenden los parámetros específicos del proceso llevado a cabo por el equipo operacional , por lo que el sistema maestro comprende: el primer interfaz para conectar con una unidad programadora adaptada para introducir y / ó modificar los citados datos; el segundo interfaz para conectar el equipo operacional , medios de transmisión para transmitir los datos entre los dos interfaces y de esta manera entre la unidad programadora y el equipo operacional ; con lo cual la unidad programadora puede acceder a los citados datos; los medios de la memoria están dispuestos dentro del…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}