Método para la determinación óptica, automática, de una posición objetivo para un dispositivo de elevación de contenedores.
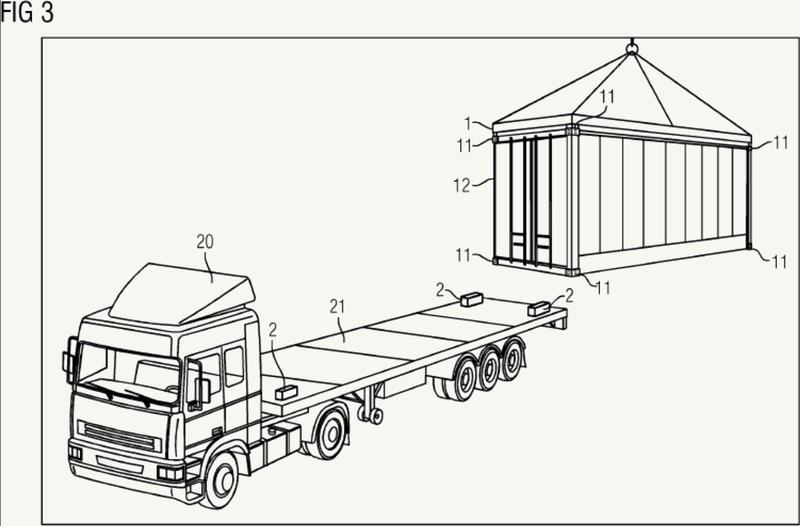
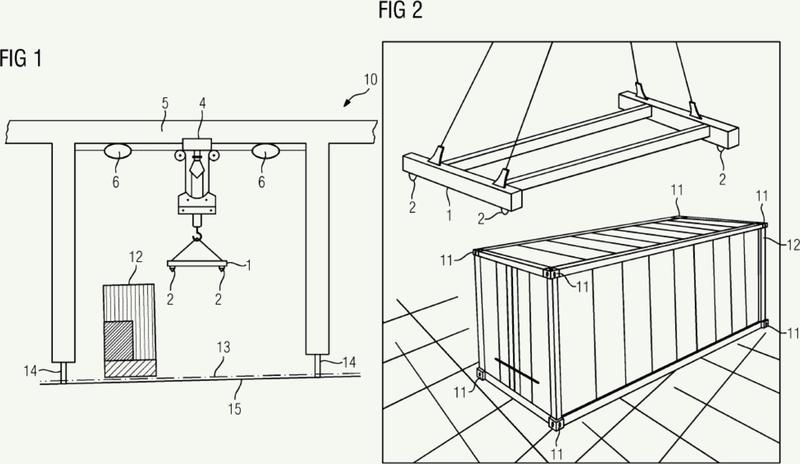
Método para posicionar un dispositivo de elevación de contenedores (1) mediante un dispositivo de sujeción (21) para contenedores (12),
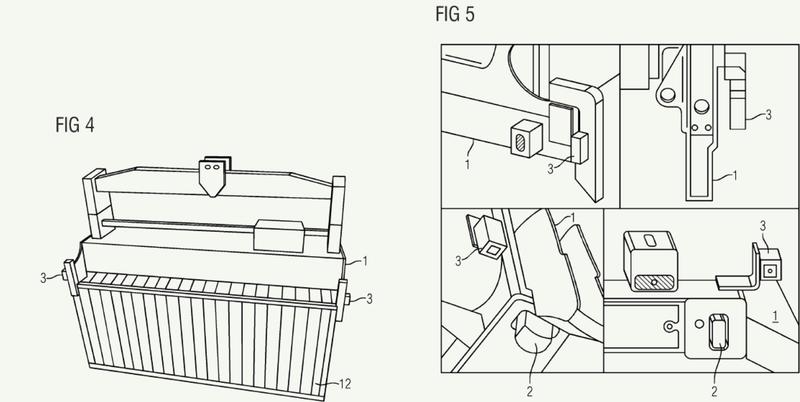
donde al menos una cámara 2D, como sensor (3) que proporciona una imagen, está fijada en el dispositivo de elevación de contenedores (1) con una parte saliente, y el sensor (3) determina un área visual (A, B) orientada esencialmente de forma perpendicular hacia abajo, donde el sensor (3) proporciona valores de medición desde un entorno del dispositivo de elevación de contenedores (1), en particular la vista superior del dispositivo de sujeción (21), a una unidad de cálculo, donde el dispositivo de sujeción (21) presenta al menos una marca (7) sobre su superficie, donde la unidad de cálculo (22) forma datos a partir de los valores de medición, en base a los cuales la unidad de cálculo (22) para el dispositivo de elevación de contenedores calcula datos de posición objetivo en posiciones de anclaje (2, 11),
caracterizado porque,
las marcas (7) presentan dimensiones de un tamaño definido que se encuentran a disposición de la unidad de cálculo (22) como parámetros, y la unidad de cálculo (22) calcula los datos de posición objetivo en posiciones de anclaje (2, 11) en base a la medición bidimensional de las marcas (7), de una información de la altura (8) entre el sensor (3) y la superficie del dispositivo de sujeción (21), y en base a un desplazamiento horizontal (23, 30) del dispositivo de elevación de contenedores (1) con respecto a la marca.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E14186240.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: MEYER, JORG, MÜLLER,Tobias, DOBLER,THOMAS, WÖBSE,STEPHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para depositar las cargas según una orientación o en una posición dadas.
- B66C13/46 B66C 13/00 […] › Indicadores de posición para cargas suspendidas o para elementos de grúas.
PDF original: ES-2627498_T3.pdf
Patentes similares o relacionadas:
 Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Flujo de video modificado para soportar el control remoto de una grúa de contenedores, del 18 de Diciembre de 2019, de ABB SCHWEIZ AG: Un procedimiento para soportar el control remoto de una grúa de contenedores , estando configurada la grúa de contenedores para desplazar contenedores de una posición […]
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
Unidad de transporte, del 17 de Julio de 2019, de Hans Künz GmbH: Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro […]
Grúa de torre y procedimiento para el montaje de una pala de rotor de turbina eólica, del 22 de Mayo de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa de torre con un torre compuesta de al menos un elemento de torre, en particular una pieza de rejilla, y preferentemente con un elemento de arriostramiento […]
Procedimiento de control para un sistema de grúa que incluye una viga de separación, del 8 de Mayo de 2019, de Nissan Motor Manufacturing (UK) Ltd: Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación […]
Agarradera para aparato de manipulación de carga y grúa, del 14 de Marzo de 2019, de KONECRANES GLOBAL CORPORATION: Una agarradera para un aparato de manipulación de carga, que comprende un dispositivo de medición de la distancia óptica y medios de sujeción (106, […]