Procedimiento y sistema de control para un motor eléctrico sin escobillas.
Procedimiento para el control de un motor eléctrico (1) sin escobillas,
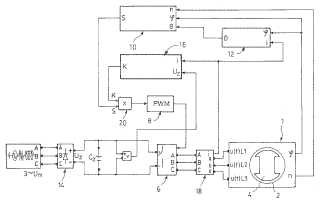
particularmente trifásico, conmutado electrónicamente, siendo una tensión alterna de alimentación (UN) rectificada y alimentada como corriente continua de circuito intermedio ( UZ) a un inversor (6) que, para la conmutación del motor eléctrico (1) y para el ajuste de la velocidad de rotación del motor, es controlable por medio de un control MDP (modulación de duración de pulsos) (8) variable respecto de su ciclo de trabajo, de manera que mediante pulsación de tensión se generan corrientes de motor cuasi sinusoidales, estando el circuito intermedio realizado como circuito intermedio delgado sin condensador de alisado al menos sin condensador electrolítico, de modo que la tensión de corriente continua de circuito intermedio (UZ) está afectada por perturbaciones periódicas, caracterizado por una compensación de variables de perturbación optimizada dinámicamente, siendo detectada, periódicamente, la variable de perturbación y generando de la misma una variable de compensación (K) mediante la cual el control PWM (8) es influenciado respecto de su ciclo de trabajo, siendo la variable de compensación corregida, dinámicamente, por medio de un circuito de regulación de modo tal que se minimiza un rizado de par del motor eléctrico (1), siendo la variable de perturbación pulsante periódica de la tensión continua de circuito intermedio (UZ) generada, periódicamente, como variable de compensación mediante inversión o bien la formación del valor inverso, almacenada y usada en al menos un periodo subsiguiente para la compensación de la variable de perturbación, y siendo detectado el comportamiento de par del motor eléctrico (1), modificando de tal modo la variable de perturbación en función del comportamiento de par respectivo mediante la variación de su posición de fase y/o su nivel de amplitud y/o su curva de amplitud, que se reduce el rizado de par, y detectando el comportamiento de par mediante una evaluación de la corriente de motor y determinación de una componente espectral de un vector espacial de corriente, cuya amplitud real es evaluada como variable real para el rizado de par respectivo y minimizado mediante la compensación de la variable de perturbación optimizada dinámicamente.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08164022.
Solicitante: EBM-PAPST MULFINGEN GMBH & CO.KG.
Nacionalidad solicitante: Alemania.
Dirección: BACHMUHLE 2 74673 MULFINGEN ALEMANIA.
Inventor/es: Wystup,Ralph, König,Daniel, Baun,Martin.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B13/04 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › que implican el uso de modelos o de simuladores.
- H02P6/08 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › Disposiciones para el control de la velocidad o el par de un solo motor (H02P 6/10, H02P 6/28 tienen proridad).
- H02P6/10 H02P 6/00 […] › Disposiciones para el control de la ondulación del par motor, p. ej. asegurando una ondulación reducida del par motor.
PDF original: ES-2379124_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de control para un motor eléctrico sin escobillas La presente invención se refiere, primeramente, según el preámbulo de la reivindicación 1, a un procedimiento para el control de un motor eléctrico sin escobillas, particularmente trifásico, conmutado electrónicamente.
Además, la invención se refiere también a un sistema de control (dispositivo de control) correspondiente que trabaja, en particular, de acuerdo con el procedimiento según el preámbulo de la reivindicación 5.
En motores eléctricos sin escobillas, particularmente trifásicos, conmutados electrónicamente, los denominados motores EC, es conocido generar de una tensión continua de circuito intermedio corrientes de fase para fases de arrollamiento del motor por medio de un inversor MDP controlado (MDP = Modulación de Duración de Pulsos) , pudiendo ajustarse también la velocidad de rotación del motor por medio de una variación de los ciclos de trabajo del control MDP. Usualmente, la tensión continua de circuito intermedio es generada mediante la rectificación de una tensión alterna de alimentación monofásica o, frecuentemente, trifásica, generando, en primer lugar, una tensión continua pulsante fuertemente oscilante por medio de un rectificador en puente. En el caso de una tensión de alimentación trifásica con la frecuencia habitual de 50 Hz, la tensión rectificada pulsa con una frecuencia de pulsos de 300 Hz. Por eso, en realidad es necesario un alisado por medio de al menos un condensador de alisado y, dado el caso, un inductancia de filtro adicional. En realidad, debido a la capacitancia relativamente grande necesaria se usan, habitualmente, condensadores electrolíticos que tienen, sin embargo, en la práctica algunas desventajas, concretamente, en particular, un gran volumen y una corta vida útil.
Por este motivo, existe hoy día la tendencia creciente de prescindir completamente de condensadores de alisado o al menos de los condensadores electrolíticos, usándose en el segundo caso condensadores de láminas con menor capacitancia de mayor vida útil. En este caso se habla, frecuentemente, de un "circuito intermedio delgado". Sin embargo, en esto se presenta la desventaja de que el rizado remanente se transfiere al par motor como variable de perturbación. Sin embargo, un par pulsante (rizado de par) produce una gran generación de ruido que, en particular en accionamientos de ventiladores, puede ser muy molesta.
Para, a ser posible, mantener el par constante pese a la tensión continua ondulatoria del circuito intermedio afectada por perturbaciones, se conocen algunas posibilidades.
Es así que el par puede mantenerse constante mediante una regulación de la corriente. La desventaja es, en este caso, el hecho de que para ello deben detectarse las corrientes de motor y que una regulación de corriente demasiado rápida puede excitar a oscilar a un sistema compuesto de inductancia de alimentación y condensador de circuito intermedio. El resultado sería una pulsación aún mayor de la tensión de circuito intermedio.
El documento DE 103 32 381 A1 o el correspondiente EP 1 499 008 A2 se refiere a un procedimiento y un sistema de control para la conmutación electrónica de un motor de corriente continua sin escobillas, estando descrita, principalmente, una regulación de corriente en la que las fases de arrollamiento del motor son controladas mediante corrientes de arrollamientos generadas especialmente respecto de su curva temporal, cuyo curso es escogido y especificado de modo que se produzca un par uniforme (constante) . Sin embargo, el documento también describe como una alternativa posible que la forma de corriente deseada puede ser conseguida también, en vez de mediante el uso de un regulador de intensidad, sin medición de corriente por medio de una modulación adecuada de la tensión. El inversor conformado de un puente integral compuesto de seis elementos de conmutación electrónicos es alimentado del lado de entrada también por medio de un circuito intermedio de corriente continua, pero en el documento no se menciona nada respecto de la existencia de una variable de perturbación de dicha corriente continua de circuito intermedio y su influencia sobre el par.
Además, es conocido usar rectificadores controlados en combinación con el inversor del motor EC (véase, por ejemplo, "Verlustarmer Umrichter ohne Zwischenkreis-Kondensator" de B. Piepenbreier y L. Sack en "Elektronik 2006 No 1", páginas 61 a 67) . Ello se realiza, concretamente, mediante inversores matriciales especiales con rectificadores controlados. La desventaja de esta disposición -que en principio funciona bien-son los costes extras por los semiconductores controlables adicionales, muy evidentes, particularmente en las grandes series de producción.
El documento JP 2000-308205 A describe un motor eléctrico de vehículo que es operado por medio de una red monofásica, estando en el circuito intermedio previsto un condensador de filtro CC para el alisado de la tensión de circuito intermedio. En este caso, se describe que la tensión de circuito intermedio debe ser generada, regulada y mantenida constante mediante un chopper elevador (MDP) . Ello contradice el principio de un "circuito intermedio delgado", porque los chopper elevadores deben contener, forzosamente, inductancias y capacitancias para el almacenamiento de energía. Por lo demás, un chopper elevador mismo genera una variable de perturbación, lo que permite la detección y el procesamiento sin almacenamiento.
La publicación JP 10-248300 A describe un convertidor de potencia (power converter) , previsto, ostensiblemente, para un motor asincrónico, que también es alimentado de una red monofásica, y un condensador de alisado y, consecuentemente, no presenta un circuito intermedio delgado.
La presente invención tiene el objetivo de reducir o, de modo ideal, eliminar de una manera técnicamente conveniente y mediante medios realizables de manera sencilla y económica una influencia adversa de una tensión continua de circuito intermedio, particularmente pulsante, afectada por una variable de perturbación, sobre el par de motor y, de este modo, sobre los ruidos del motor.
De acuerdo con la invención, ello se consigue mediante un procedimiento según la reivindicación 1. Un sistema de control apropiado para la aplicación del procedimiento es objeto de la reivindicación 5. Otras configuraciones ventajosas de la invención están contenidas en las reivindicaciones dependientes.
Según la invención se realiza, consecuentemente, una compensación de variables de perturbación novedosa y, concretamente, optimizada dinámicamente. En este caso, la variable de perturbación -en el caso de aplicación especial, la tensión continua pulsante de circuito intermedio- es detectada periódicamente y se genera de ello y almacena mediante la inversión o bien el valor inverso una variable de compensación que, a continuación, junto con una señal de salida habitual del regulador de ángulo y velocidad de rotación del sistema de control, pone a disposición de un elemento de ajuste del control MDP, durante al menos un período subsiguiente. De esta manera, se "suprime", prácticamente, la perturbación mediante una adaptación de los ciclos de trabajo MDP.
En este caso, en términos de la invención es importante que la variable de compensación sea corregida dinámicamente por medio de un circuito de control, de manera que sea minimizado el rizado de par del motor eléctrico. Para ello, el comportamiento del par es detectado, y la variable de compensación es compensada de tal manera mediante la variación de su posición de fase y/o su amplitud (nivel y o curva de amplitud) en función del comportamiento de par respectivo, que el rizado de par se reduce a un mínimo o, incluso, es eliminado completamente. En este contexto, "dinámicamente" o, más acertadamente "cuasi dinámicamente" significa que la corrección de la variable de compensación se realiza durante el funcionamiento del motor EC cuando es necesaria. Preferentemente, los procesos descritos se repiten cíclicamente, por ejemplo en cada período o en determinados períodos.
La invención se basa en el conocimiento de que, por un lado, en una compensación de perturbaciones "normales" sin la correspondiente regulación de corrección dinámica según la invención debería ser conocida la respectiva variable de perturbación y la variable de compensación puesta, en términos de exactitud de fase y amplitud, a disposición del elemento de ajuste MDP en el momento correcto, pero que, por otro lado, en la práctica... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control de un motor eléctrico (1) sin escobillas, particularmente trifásico, conmutado electrónicamente, siendo una tensión alterna de alimentación (UN) rectificada y alimentada como corriente continua de circuito intermedio ( UZ) a un inversor (6) que, para la conmutación del motor eléctrico (1) y para el ajuste de la velocidad de rotación del motor, es controlable por medio de un control MDP (modulación de duración de pulsos) (8) variable respecto de su ciclo de trabajo, de manera que mediante pulsación de tensión se generan corrientes de motor cuasi sinusoidales, estando el circuito intermedio realizado como circuito intermedio delgado sin condensador de alisado al menos sin condensador electrolítico, de modo que la tensión de corriente continua de circuito intermedio (UZ) está afectada por perturbaciones periódicas, caracterizado por una compensación de variables de perturbación optimizada dinámicamente, siendo detectada, periódicamente, la variable de perturbación y generando de la misma una variable de compensación (K) mediante la cual el control PWM (8) es influenciado respecto de su ciclo de trabajo, siendo la variable de compensación corregida, dinámicamente, por medio de un circuito de regulación de modo tal que se minimiza un rizado de par del motor eléctrico (1) , siendo la variable de perturbación pulsante periódica de la tensión continua de circuito intermedio (UZ) generada, periódicamente, como variable de compensación mediante inversión o bien la formación del valor inverso, almacenada y usada en al menos un periodo subsiguiente para la compensación de la variable de perturbación, y siendo detectado el comportamiento de par del motor eléctrico (1) , modificando de tal modo la variable de perturbación en función del comportamiento de par respectivo mediante la variación de su posición de fase y/o su nivel de amplitud y/o su curva de amplitud, que se reduce el rizado de par, y detectando el comportamiento de par mediante una evaluación de la corriente de motor y determinación de una componente espectral de un vector espacial de corriente, cuya amplitud real es evaluada como variable real para el rizado de par respectivo y minimizado mediante la compensación de la variable de perturbación optimizada dinámicamente.
2. Procedimiento según la reivindicación 1, caracterizado porque la componente espectral es calculada referida a una frecuencia determinada mediante una transformación rápida de Fourier (FFT) .
3. Procedimiento según la reivindicación 1, caracterizado porque la evaluación mediante el detector de AM se realiza mediante filtración, preferentemente con rectificado y filtrado.
4. Procedimiento según una de las reivindicación 1 a 3, caracterizado por una aplicación con una tensión alterna de alimentación (UN) trifásica de 50 Hz, pulsando la variable de perturbación de la tensión continua de circuito intermedio (UZ) a 300 Hz, en base al circuito intermedio delgado y alisado faltante, o sólo poco capacitivo, de modo que en el espectro del par se presenta como componente fundamental una componente espectral de 300 Hz, cuya amplitud es procesada como valor real del rizado de par.
5. Sistema de control para un motor eléctrico (1) sin escobillas conmutado electrónicamente, en particular con aplicación del procedimiento según una de las reivindicaciones precedentes, compuesto de un rectificador (14 y un circuito delgado conectado aguas abajo sin condensador de alisado o al menos sin condensador electrolítico, rectificando el rectificador (14) una tensión alterna de alimentación trifásica (UN) a una tensión continua de circuito intermedio (UZ) pulsante afectada por una variable de perturbación, y un inversor (6) conectado aguas abajo controlado mediante un control MDP (8) para generar tensiones de fase de motor moduladas de manera cuasi sinusoidal (u (t) L1/L2/L3) , caracterizado por un dispositivo adicional (16) para la compensación de variables de perturbación optimizada dinámicamente de modo tal que un rizado de par del motor eléctrico (1) sea minimizado, presentando el dispositivo adicional (16) una entrada de tensión para la tensión continua de circuito intermedio (UZ) afectada por la variable de perturbación, una entrada de corriente para al menos dos corrientes de fase (i) o una denominada corriente sumada, así como medios para generar una variable de compensación (K) mediante la inversión o bien el valor inverso de la variable de perturbación y medios para corregir la variable de compensación
(K) mediante la variación de la posición de fases y/o de amplitud.
6. Sistema de control según la reivindicación 5, caracterizado porque por medio de la variable de compensación (K) corregida actúa en un elemento multiplicador (20) una variable de control (S) generada mediante un regulador de ángulo y velocidad de rotación (10) para el control MDP (8) .
Patentes similares o relacionadas:
Utilización de un controlador multivariable avanzado para el control de unidades alfabutol, del 17 de Junio de 2020, de AXENS: Procedimiento de control avanzado (APC) que se puede aplicar a unidades para la oligomerización de etileno a buteno-1 que operan en un reactor en presencia de un catalizador […]
Método de control de propiedades en sistemas multimodales, del 18 de Marzo de 2020, de UNION CARBIDE CHEMICALS & PLASTICS TECHNOLOGY LLC: Un método de control de un procedimiento para producir un polímero de olefina en al menos un reactor, que comprende: (a) calcular un primer valor de al menos una propiedad […]
Procedimiento combinado para detectar anomalías en un sistema de distribución de agua, del 8 de Enero de 2020, de SUEZ Groupe: Un procedimiento para detectar anomalías en un sistema de distribución de agua compuesto por una red de nodos, comprendiendo dicho […]
Equipo de control electrónico para un componente de la generación de aire comprimido, tratamiento de aire comprimido, almacenamiento de aire comprimido y/o distribución de aire comprimido, del 11 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Equipo de control electrónico para un componente de la generación de aire comprimido, tratamiento de aire comprimido, almacenamiento de aire comprimido […]
Procedimiento para optimizar perfiles de movimiento, procedimiento para proporcionar perfiles de movimiento, dispositivo de control, instalación y producto de programa informático, del 4 de Diciembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para optimizar los perfiles de movimiento (B1, B2) en una instalación (A), donde la instalación (A) presenta al menos una prensa (1a, 1b, 1c) con […]
Procedimiento para la resolución de una tarea de control en una instalación de proceso, del 16 de Octubre de 2019, de Z & J Technologies GmbH: Procedimiento para la resolución de una tarea de control en una instalación de proceso, en particular para el paso de la instalación de proceso de un estado […]
Método de control de propiedades en sistemas multimodales, del 7 de Agosto de 2019, de UNION CARBIDE CORPORATION: Un método de control de un procedimiento para producir una composición polimérica, comprendiendo el método: (a) determinar un volumen existente de […]
Método de control de proceso, del 19 de Junio de 2019, de CORE A/S: Un método para controlar un proceso, comprendiendo el método un modelo de control adaptativo y al menos una entrada de proceso y al menos una salida […]