PROCEDIMIENTO DE VIGILANCIA PARA UN DETECTOR DE LA POSICIÓN.
Procedimiento para el control en tiempo real de las amplitudes de señales de medición sinusoidales y cosinusoidales desfasadas unas respecto a otras,
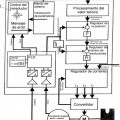
de un transductor (2) incremental de posición o sincrotransformador, con las siguientes etapas de procedimiento: a) Exploración cíclica y procesamiento matemático y combinación de las señales de medición, para la formación de un valor m de control común a las amplitudes del valor de medición, por ciclo de exploración. b) Determinación de un valor límite superior y de uno inferior, mediante una valoración estadística de varios valores de control almacenados previamente. c) Comparación del respectivo valor de control con el valor (3, 4) límite superior e inferior, con fines de control. d) Generación de una señal de error cuando el valor m de control rebase una o varias veces el o los valores límite, caracterizado porque las etapas a), b), c) y d) se utilizan repetidamente para un control continuo y/o diagnóstico de una regulación de la posición, velocidad y/o aceleración, que se basa en el transductor (2) de posición, y en caso de error se produce un mensaje de error a un mando de orden superior para que este, en función de ello, ponga en marcha medidas predeterminadas de seguridad
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E02000862.
Solicitante: BAUMÜLLER ANLAGEN-SYSTEMTECHNIK GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: OSTENDSTRASSE 84 90482 NÜRNBERG ALEMANIA.
Inventor/es: HELLER, ULRICH.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Enero de 2002.
Clasificación Internacional de Patentes:
- G01D5/244Q2
Clasificación PCT:
- G01D5/244 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
Clasificación antigua:
- G01D5/244 G01D 5/00 […] › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356062_T3.pdf



Fragmento de la descripción:
La invención se refiere a un procedimiento para el control en tiempo real de las amplitudes de señales de medición sinusoidales y cosinusoidales desfasadas unas respecto a otras, de un transductor incremental de posición o sincrotransformador, con las siguientes etapas de procedimiento:
a) Exploración cíclica y procesamiento matemático y combinación de las señales de medición, para la 5 formación de un valor (m) de control común a las amplitudes del valor de medición, por ciclo de exploración.
b) Determinación de un valor límite superior y de uno inferior, mediante una valoración estadística de varios valores de control almacenados previamente.
c) Comparación del respectivo valor de control con el valor límite superior e inferior, con fines de control. 10
d) Generación de una señal de error cuando el valor de control rebase una o varias veces el o los valores límite.
La invención se refiere, además, a un programa de ordenador con medios de codificación del programa, para la realización de este procedimiento. La invención se refiere, además, a un circuito secuencial digital que está preparado para la realización del procedimiento de control del transductor, desde el punto de vista técnico del 15 programa y/o del circuito. Además, la invención se refiere a un regulador digital de accionamiento, con el circuito secuencial y con un módulo de software, para la realización del procedimiento de control del transductor.
El empleo de transductores incrementales de posición que emiten señales de medición sinusoidales y cosinusoidales desfasadas 90º unas respecto a las otras, es conocido generalmente en especial para el funcionamiento de circuitos reguladores de accionamiento (véase, por ejemplo, memoria de patente DE 43 31 151 20 C2 y prospecto de la firma “Sistemas de realimentación de motores para servomotores SINCOS SCS/SCM 60 y SCS/SCS 70” de la firma Max Stegmann GMBH, D-78156 Donaueschingen).
Por el documento DE 43 36 767 A1 se conoce un procedimiento de control de señales para las dos señales de medición desfasadas de tales transductores incrementales de posición.
Se parte de un círculo que se genera cuando se registran los valores instantáneos del seno y del coseno 25 en un sistema de coordenadas (la llamada figura de Lissajous). El diámetro o el radio de este círculo es aquí función del valor de las amplitudes de las dos señales de medición. Para el control se establecen dos círculos de control con un diámetro mayor y uno menor. La superficie dentro del círculo con el diámetro menor, indica la zona en la que las amplitudes son demasiado pequeñas para poder evaluar las señales de exploración en forma apropiada para el funcionamiento. La zona exterior al círculo con diámetro mayor, indica la zona de 30 sobrerregulación en la que las amplitudes de la señal son demasiado grandes. Para el control de la señal, se controla el valor del vector/radio de la señal que resulta de las dos señales de medición. Si está situado fuera de la superficie anular circular permisible, se emitirá una señal de error. Como método de control se propone una consideración de la variación temporal del vector resultante de la señal. Para ello se determina el signo de la pendiente de una recta que una dos puntos del valor de medición. 35
Un procedimiento genérico de control se conoce por el documento EP 0 836 080 A1. Sirve para la comprobación de un dispositivo de medición de la posición y de sus señales sinusoidales y cosinusoidales de exploración, dependientes de la posición, en especial durante la instalación de la cabeza de exploración (ayuda al montaje). Para ello se forman figuras de Lissajous, después de lo cual se toman continuamente varios pares sucesivos de valores (amplitudes de la señal) de las dos señales de exploración, y de cada par de valores se 40 calcula el radio instantáneo de la figura de Lissajous. A partir de un número determinado de valores del radio calculado sucesivamente y almacenados, se determina respectivamente el valor mínimo del radio y el valor máximo del radio. En una pantalla indicadora se señala una barra continua entre estos dos valores extremos. Si durante las mediciones y cálculos siguientes de nuevos valores del radio, se modifica el valor mínimo y el máximo, se modifica también la zona de la barra. Para la representación de la anchura teórica de la barra, se superponen a 45 esta zona dos corchetes de valor límite. Para ello se calcula el valor medio de varios valores sucesivos del radio. La posición de un corchete izquierdo se determina restando el 10% del valor medio. Análogamente se procede para el cálculo del corchete derecho. La tolerancia permisible es aquí porcentual, es decir, está prefijada relativamente. Así se modifica la zona incluida entre los dos corchetes limitadores, en función del valor medio instantáneo. 50
Por el contrario la misión de la invención se basa en ensanchar la anchura y las posibilidades de aplicación de métodos de control de transductores de posición, evitando eventuales inconvenientes del estado actual de la técnica, arriba expuesto.
Para la solución, en un procedimiento con las notas características citadas al comienzo, se propone según la invención que las etapas a), b), c) y d) de procedimiento arriba citadas, se utilicen repetidamente para un 55 control continuo y/o diagnóstico de una regulación de la posición, velocidad y/o aceleración, que se base en el
transductor de posición. Así pues, las etapas de procedimiento no sólo se señalan únicamente como en el estado actual de la técnica, solamente como dispositivo de ayuda al montaje para la comprobación de la disposición correcta del transductor de posición: más bien se integran según la invención, como mecanismo automatizado e interno de control, en el funcionamiento continuo de un circuito de regulación para posición, velocidad y/o aceleración. Una ventaja obtenida con esto, consiste en que se suprime la necesidad de una pantalla indicadora 5 específica en forma de un diagrama de barras, que es útil en primera línea para el proceso de montaje en el transductor de posición. En lugar de esto, se puede producir internamente un mensaje de error a un mando de orden superior que en función de esto, puede poner en marcha medidas predeterminadas de seguridad.
Los valores límite superiores e inferiores para las amplitudes de la señal, que se pueden representar según el principio de las figuras de Lissajous, como círculo interno y externo de control (véase, por ejemplo, 10 documento DE 43 36 767 A1, columna 2, líneas 33 y 34), pueden estar predefinidos y ajustados fijos, mediante una inicialización o establecimiento inicial de parámetros para toda la duración del funcionamiento. Por motivos de la tolerancia de errores es conveniente no emitir un mensaje de error hasta que se haya rebasado o no se haya llegado, a uno de los valores o círculos límite de control, tres veces seguidas.
La idoneidad práctica del control de las amplitudes de la señal, es función decisivamente del ajuste de 15 estos valores límite de control. Si los valores límite o los dos círculos de control se establecen demasiado estrechos, perturbaciones relativamente insignificantes pueden disparar ya un mensaje de error, a pesar de que el sistema del transductor de posición funcione bien en lo esencial. Valores límite de control, demasiado separados uno de otro, conducen por el contrario a un tiempo de reacción del control, posiblemente demasiado lento. Con ello se produce el problema de encontrar, frente a errores despreciables, valores límite tolerantes de control que 20 tengan en cuenta las características y condiciones marco específicas de diferentes tipos de transductores de posición, y otras constelaciones de hardware. Incluso para diferentes estados funcionales (por ejemplo, en caso de un accionamiento eléctrico, corriente continua, funcionamiento reversible, y similares), así como estados de desgaste, se pueden dar ajustes óptimos correspondientemente diferentes de los valores límites de control o de los círculos de control. En especial se puede modificar el ajuste óptimo de los valores límite de control durante la 25 vida útil y tiempo de funcionamiento de una regulación de posición o de accionamiento.
Para la solución de este grupo de problemas, en el marco de una configuración especial de la invención, se propone ampliar y afinar repetidamente en el marco del control y/o diagnóstico continuo de la regulación, la valoración estadística de varios valores de control almacenados anteriormente. Para ello se propone en... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control en tiempo real de las amplitudes de señales de medición sinusoidales y cosinusoidales desfasadas unas respecto a otras, de un transductor (2) incremental de posición o sincrotransformador, con las siguientes etapas de procedimiento:
a) Exploración cíclica y procesamiento matemático y combinación de las señales de medición, para la formación de un valor m de control común a las amplitudes del valor de medición, por ciclo de exploración. 5
b) Determinación de un valor límite superior y de uno inferior, mediante una valoración estadística de varios valores de control almacenados previamente.
c) Comparación del respectivo valor de control con el valor (3, 4) límite superior e inferior, con fines de control.
d) Generación de una señal de error cuando el valor m de control rebase una o varias veces el o los valores límite, 10
caracterizado porque las etapas a), b), c) y d) se utilizan repetidamente para un control continuo y/o diagnóstico de una regulación de la posición, velocidad y/o aceleración, que se basa en el transductor (2) de posición, y en caso de error se produce un mensaje de error a un mando de orden superior para que este, en función de ello, ponga en marcha medidas predeterminadas de seguridad.
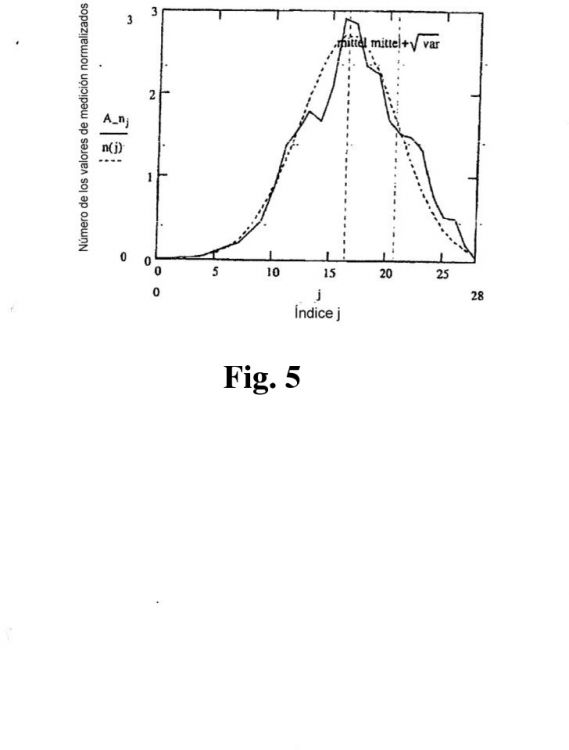
2. Procedimiento según la reivindicación 1, caracterizado porque en el marco del control y/o diagnóstico 15 continuo de la regulación, se forma repetidamente un histograma, ley de distribución u otra densidad de probabilidad, para los valores m de control que se acumulan a lo largo de varios ciclos de exploración, y el valor (3, 4) límite superior e inferior se adapta en caso de su modificación, mediante una evaluación del respectivo histograma, ley de distribución, o de la respectiva densidad de probabilidad.
3. Procedimiento según la reivindicación 2, caracterizado porque, para su adaptación, los valores (3, 4) 20 límite se determinan o modifican de tal manera que al menos aproximadamente corresponden a una especie de encadenamiento de intervalos del curso, o de la zona limitada por los extremos de la curva del histograma, ley de distribución o de la densidad de probabilidad.
4. Procedimiento según la reivindicación 2 ó 3, caracterizado porque para la formación del histograma, ley de distribución o de la densidad de probabilidad, se acumulan y evalúan al menos 64, de preferencia unos treinta 25 mil valores m de control.
5. Procedimiento según alguna de las reivindicaciones 2 a 4, caracterizado porque para la formación del histograma, ley de distribución o de la densidad de probabilidad, se evalúan los valores m de control acumulados a lo largo de varios ciclos de exploración, para una serie con N elementos de la serie, y con índices i de orden asignados a cada uno de aquellos, calculándose un índice i para cada uno de los valores m de control resultantes 30 de una exploración, como sigue:
i = m * N/(Amax – Amin),
siendo N el número de los elementos de la serie, Amax el valor de control máximo posible o máximo permisible, y Amin, el valor de control mínimo posible o mínimo permisible,
e incrementando después el elemento de la serie, asignado al índice calculado. 35
6. Procedimiento según la reivindicación 5, caracterizado porque correspondiendo al citado encadenamiento de intervalos, se determina un índice OU_igrenz superior e inferior de la serie, determinándose los distintos elementos de la serie, distintos de cero, con valor mínimo y máximo del índice, reduciendo o incrementando estos índices para la formación del índice OU_igrenz inferior y superior, y calculando los valores OU_wgrenz límite superior e inferior, como sigue: 40
OU_wgrenz = (Amax – Amin) * OU_igrenz / N.
7. Procedimiento según la reivindicación 6, caracterizado porque el valor límite superior y/o inferior, todavía se amplia después del cálculo, en un 5 a 25%, de preferencia del 10 al 20%.
8. Procedimiento según alguna de las reivindicaciones precedentes, caracterizado porque, en el marco del control y/o diagnóstico continuo de la regulación, de la evaluación o valoración estadística, se determinan la 45 varianza o desviación estándar y/u otro valor de variación para los valores de control almacenados previamente, y se comparan con un límite superior predeterminado, y en caso de exceso, se genera una señal de error.
9. Procedimiento según las reivindicaciones 2 y 8, caracterizado porque al histograma, ley de distribución o de la densidad de probabilidad de los valores de control, se adapta o aproxima una función norm(x) de densidad
de un modelo de aproximación que se base en una distribución estadística normal, y de la función adaptada de densidad, se deduce la varianza para los valores de control.
10. Procedimiento según la reivindicación 9, caracterizado porque la adaptación o aproximación se lleva a cabo mediante el método de los mínimos cuadrados, minimizando una función de calidad.
11. Procedimiento según la reivindicación 9 ó 10, caracterizado porque la función adaptada de densidad, 5 o sus parámetros valor medio y/o varianza, se determinan con ayuda de un modelo matemático calculado mediante regresión exponencial, de preferencia, de una función cuadrática o parabólica.
12. Procedimiento según la reivindicación 11, caracterizado porque los parámetros valor medio y/o varianza se obtienen por comparación con los coeficientes de la función cuadrática o parabólica.
13. Procedimiento según la reivindicación 12, caracterizado porque los coeficientes de la función 10 cuadrática o parabólica, se optimizan por el método de los mínimos cuadrados, minimizando una función de calidad.
14. Procedimiento según alguna de las reivindicaciones 8 a 13, caracterizado porque el límite superior para la varianza o anchura de la variación, se predetermina en función del tipo del respectivo transductor (2) de posición y/o de sus condiciones de instalación y/o funcionales. 15
15. Programa de ordenador con medios de codificación del programa, para realizar todas las etapas del procedimiento según alguna de las reivindicaciones precedentes, cuando el programa se ejecuta en un ordenador.
16. Programa de ordenador con medios de codificación del programa según la reivindicación 15, que se almacena en un soporte de datos leíble en un ordenador.
17. Circuito secuencial digital, en especial una unidad calculadora y de mando con dispositivo de 20 memoria, que está preparado para la realización del procedimiento de control del transductor, desde el punto de vista técnico del programa y/o del circuito según alguna de las reivindicaciones precedentes, caracterizado por interfaces para la admisión cíclica y procesamiento de señales seno y coseno digitalizadas, para la inicialización o introducción de parámetros, de los valores (3, 4) límite superior e inferior, y para la emisión de un eventual mensaje de error resultante del control. 25
18. Circuito secuencial según la reivindicación 17 para la realización del procedimiento según alguna de las reivindicaciones 8 a 14, caracterizado por una interfaz para la introducción de parámetros, o recepción de un valor límite superior para la varianza.
19. Circuito secuencial según la reivindicación 17 ó 18 para la realización del procedimiento según alguna de las reivindicaciones 8 a 14, caracterizado por una interfaz para la introducción de parámetros, o recepción del 30 número de los ciclos de exploración, o del tiempo del ciclo de adaptación, según el cual se adapta o se ajusta el valor límite superior e inferior, mediante evaluación estadística.
20. Circuito secuencial según la reivindicación 17, 18 ó 19, caracterizado por una integración constructiva con un regulador digital de accionamiento de un sistema eléctrico de accionamiento.
21. Regulador digital de accionamiento con el circuito secuencial según alguna de las reivindicaciones 17 35 a 20, caracterizado porque el circuito secuencial está realizado con un dispositivo de memoria, en el que está implementado un módulo (1) de software para el control del transductor de posición, con las citadas interfaces.
Patentes similares o relacionadas:
Sistema y proceso para determinar desplazamientos de instrumentos de medición, del 10 de Junio de 2020, de PSC Engineering S.r.l: Sistema para determinar y restar desplazamientos (δ) de instrumentos de medición e instrumentaciones para aplicaciones navales para estabilizar […]
Método de estimación de fase y aparato para el mismo, del 20 de Mayo de 2020, de Novanta Corporation: Aparato para estimación de fase mediante el procesamiento de señales de sensor desde un conjunto de sensores , transportando las señales de sensor colectivamente una fase […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Dispositivo de medida de posición y método para utilizar un dispositivo de medida de posición, del 6 de Noviembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medida de posición que comprende un soporte de graduación sobre el que hay situada una graduación de medida , una unidad de detección […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Método de comprobación para un dispositivo optoelectrónico de medida, y dispositivo, del 16 de Octubre de 2019, de FAGOR AUTOMATION S.COOP: Método de comprobación para un dispositivo optoelectrónico de medida, comprendiendo el dispositivo una regla graduada con una pluralidad de marcas distribuidas […]
 Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]