METODO Y DISPOSITIVO PARA LA DETERMINACION DE UN ANGULO DE ROTACION O DE UN DESPLAZAMIENTO.
Método para la determinación de un ángulo de rotación o de un desplazamiento,
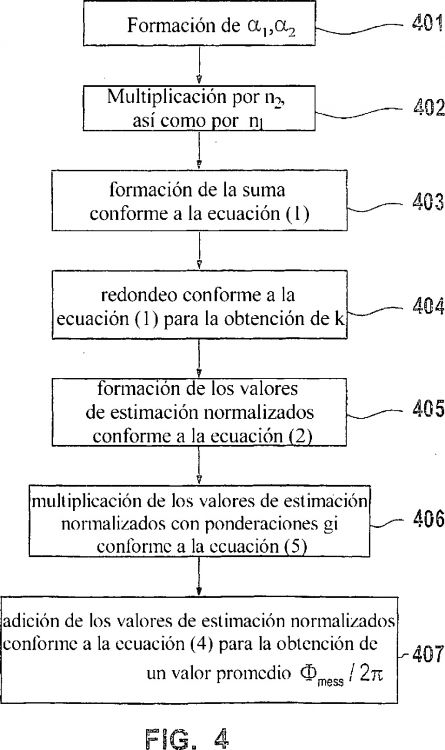
el cual presenta las siguientes etapas:
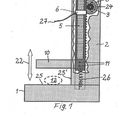
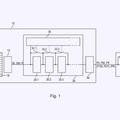
- formación de al menos dos valores de fase ai (i = 1,2... N) a través del muestreo digital de sensores (10), los cuales son asignados respectivamente a los valores de fase y los cuales presentan diferentes números de períodos ni,
- cálculo de un valor operativo k, el cual puede ser representado como un número entero en base a los valores de fase ai medidos y a los números de períodos ni asignados respectivamente a éstos,
- cálculo de al menos dos valores de estimación normalizados Fsi/2p en base a los valores de fase ai, a los números de períodos ni, al valor operativo k y valores operativos integrales ki, los cuales colocan a los números de períodos ni, en una relación de normalización de unos con otros, y
- sumatoria ponderada de los valores de estimación Fsi/2p para la obtención de un valor de estimación promedio Fmess/2p, el cual representa el ángulo de rotación o el desplazamiento a determinar
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE02/02052.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20,70442 STUTTGART.
Inventor/es: STEINLECHNER, SIEGBERT, WENZLER, AXEL, MARX, KLAUS.
Fecha de Publicación: .
Fecha Concesión Europea: 31 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01D5/245B
Clasificación PCT:
- G01D5/245 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando un número variable de pulsos en un tren.
Clasificación antigua:
- G01D5/245 G01D 5/00 […] › utilizando un número variable de pulsos en un tren.
Fragmento de la descripción:
Método y dispositivo para la determinación de un ángulo de rotación o de un desplazamiento.
La presente invención hace referencia a un método y a un dispositivo para la determinación de un ángulo de rotación o de un desplazamiento, conforme a los preámbulos de la reivindicación 1, así como 9, del estado de la técnica.
En diferentes aplicaciones, en particular en dispositivos, con cuya ayuda debe poder establecerse la posición angular de un eje de rotación, se presenta la necesidad de conocer la posición angular exacta del eje. Esta exigencia puede realizarse con la ayuda de sensores angulares analógicos, por ejemplo potenciómetros, los cuales, en cada posición después de la conexión proporcionan de inmediato el valor de posición angular válido en forma de una tensión.
Si estos dispositivos de medición angular son empleados para áreas angulares mayores a 360º, se presenta el problema de que ya no puede establecerse en qué vuelta de la rotación se encuentra el eje. Para evaluar áreas angulares mayores a 360º pueden, si embargo, utilizarse detectores incrementales, en los cuales la posición angular es establecida a través de cuentas progresivas y cuentas regresivas de impulsos.
Con tales detectores incrementales no puede, sin embargo, llevarse a cabo una medición angular absoluta, puesto que sólo pueden contarse los incrementos que producen movimiento delante de un captador.
En el caso de algunas tareas de medición, al emplear detectores incrementales, se originan valores de medición de fases, a partir de los cuales pueden determinarse las magnitudes a medir propiamente dichas, como por ejemplo un ángulo, un desplazamiento o una distancia. Para ampliar la gama inequívoca (correspondiente a un área de la fase de 0 - 2 p) es posible emplear al menos un canal de medición adicional con otra elevación de las fases y, a partir de una combinación adecuada de los valores de medición, deducir una gama inequívoca mayor.
La medición a distancia con radar o con luz láser modulada constituyen ejemplos para ello. De este modo, se llevan a cabo mediciones - N con diferentes frecuencias f1..., fN. Las señales reflectadas desde un objetivo en una distancia x presentan, en el lugar de emisión, los desplazamientos de fases (c = velocidad de la luz)
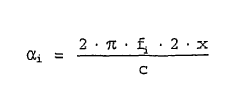
Los desplazamientos de las fases son, por tanto, proporcionales con respecto a las magnitudes a medir y a la frecuencia utilizada. Sin embargo, los valores concretos de medición de las fases se ubican siempre dentro del rango de 0 a 2p, es decir que siempre se encuentran determinados sólo hasta múltiplos integrales de 2p.
Como otro ejemplo puede mencionarse un detector de ángulos óptico. En este caso tiene lugar un muestreo digital de N gratículas ópticas, con lo cual se producen trazas con gratículas ópticas sobre un disco o un cilindro. En una vuelta de rotación se efectúan respectivamente n1 períodos, así como líneas. Si se miden las longitudes de las fases de las trazas con la ayuda de detectores optoelectrónicos en forma relativa a una ventana de medición establecida, se obtienen entones las longitudes de las fases.

Las fases son, por tanto, proporcionales al ángulo de torsión F y a los números de períodos. También en este caso, los valores de medición concretos de las fases se ubican en un rango de 0 a 2p.
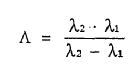
Finalmente se hace referencia a la interferometría de longitudes de ondas múltiples. También en este caso se miden, por ejemplo, desplazamientos x mediante el empleo de al menos dos longitudes de ondas luminosas ?i, con lo cual se obtiene una gama inequívoca ampliada. Además, se produce aquí, en el dimensionamiento correspondiente, un desarrollo de las fases como el anteriormente mencionado.
La valoración de las señales obtenidas mediante métodos semejantes, es decir, la determinación de x, así como de F, se efectúa, por ejemplo, mediante el método nonius de determinación del horóptero longitudinal.
En el método nonius clásico, es formada la diferencia de dos señales de las fases, con lo cual, en el caso de que esta diferencia sea menor a cero, es adicionado 2p. Este método presenta grandes limitaciones, puesto que errores de medición en las fases se traspasan por completo al resultado final. Por otra parte, un método semejante sólo funciona cuando ambos números de períodos observados se diferencian exactamente en 1.
Por la solicitud DE-OS 195 06 938 se conoce un método nonius modificado, en el cual se determina, a través de adición ponderada y de la medición adicional, una constante del valor de una de las magnitudes a medir, la cual es dependiente del área angular. Este método se caracteriza porque los errores de medición en las señales de las fases pueden reducirse en forma manifiesta. Para este método es también necesario que ambos números de períodos observados se diferencien exactamente en 1.
Finalmente, por la solicitud DE-P 1004260, se conoce un método para determinar un ángulo de rotación o distancia a través de la evaluación de valores de medición de las fases. En este método, los valores de las fases medidos en un espacio dimensional N son reproducidos, mediante una transformación A lineal, en N-1 señales nuevas S1. Estas señales S1 son transformadas, mediante un dispositivo de cuantificación, en valores integrales Wi correspondientes y, mediante una reproducción lineal C, convertidas en N valores reales Zi. A estos valores se adicionan valores ponderados de las fases ai módulo 2p, por lo cual se obtienen N valores de estimación para los ángulos p a medir. Los N valores de estimación son, dado el caso, corregidos en sus puntos discontinuos y, adicionados ponderadamente, considerando su ángulos de las fases.
Es objeto de la presente invención el facilitar, del modo más sencillo posible, valores de medición para desplazamientos x, así como ángulos F, sobre la base de al menos dos valores de medición de las fases. En este caso, ya no es imprescindible la condición presente en los métodos tradicionales, la cual exige que ambos números de períodos deben diferenciarse exactamente en 1.
Este objeto se alcanzará mediante un método con las características de la reivindicación 1, así como mediante un dispositivo con las características de la reivindicación 9.
Ventajas de la invención
Conforme a la invención, se proporciona un método particularmente sencillo, con el cual, valores a determinarse, por ejemplo un ángulo F o un desplazamiento, así como un tramo x, pueden determinarse en forma confiable. En comparación con los métodos tradicionales, se dispone de una amplia libertad en la elección de los números de períodos para la determinación de al menos dos señales de las fases. La ponderación prevista de los valores de medición por separado, conforme a la invención, se evidencia, en cuanto a los cálculos, como realizable de manera particularmente sencilla.
Conformaciones ventajosas del método conforme a la invención, así como del dispositivo conforme a la invención, son objeto de las reivindicaciones dependientes.
Conforme a una primera forma preferente de ejecución del método conforme a la invención, para el caso de la formación de dos valores de las fases a1, a2, el valor operativo k, el cual es empleado dentro del marco de la determinación de un ángulo de rotación o de un desplazamiento, se calcula mediante un redondeo de la expresión
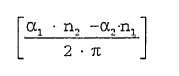
En este caso son evaluados dos valores de las fases a1, a2, los cuales se obtienen respectivamente de sensores, así como de detectores que presentan períodos n1, n2. La formación y utilización de un valor operativo semejante, sobre la base de dos valores de las fases es realizable de manera sencilla en cuanto a los cálculos. Como redondeo se comprende, en este caso, el reemplazo del valor calculado por el número entero siguiente menor o mayor. La divergencia...
Reivindicaciones:
1. Método para la determinación de un ángulo de rotación o de un desplazamiento, el cual presenta las siguientes etapas:
2. Método conforme a la reivindicación 1, caracterizado porque, en el caso de dos valores de fase formados a1, a2, el valor operativo k es calculado a través del redondeo de la expresión
con lo cual n1 es el número de períodos del sensor (10) asignado al valor de fase a1 y n2 es el número de períodos del sensor (10) asignado al valor de fase a2.
3. Método conforme a una de las reivindicaciones 1 ó 2, caracterizado porque, en caso de dos valores de fase a1, a2 formados, la relación de normalización de los números de períodos n1, n2 y de los factores operativos k1, k2 es seleccionada como k2 n1 - k1 n2= 1.
4. Método conforme a una de las reivindicaciones precedentes, caracterizado porque, los valores de estimación normalizados Fsi/2p son calculados conforme a una ecuación de la forma
5. Método conforme a una de las reivindicaciones precedentes, caracterizado porque la sumatoria ponderada de al menos dos valores de estimación normalizados Fmess/2p es calculada conforme a una ecuación de la forma
con lo cual gi representa factores de ponderación, para los cual es válido
6. Método conforme a la reivindicación 5, caracterizado porque, en caso de dos valores de fase a1, a2 formados, los factores de ponderación son colocados como g1 = g2 = 0,5.
7. Método conforme a la reivindicación 5, caracterizado porque, los factores de ponderación son calculados conformes a una relación de la forma
8. Método conforme a la reivindicación 5, caracterizado porque, los factores de ponderación gi son calculados conforme a una relación de la forma
con lo cual wi representa números enteros, los cuales son seleccionados de modo tal, que los g'i se aproximan tan exactamente como sea posible a los gi.
9. Dispositivo para la determinación de un ángulo de rotación o de un desplazamiento con
Patentes similares o relacionadas:
 DISPOSITIVO PARA MEDIR EL GROSOR Y/O LA LONGITUD DE OBJETOS, del 9 de Marzo de 2011, de KRAEMER, THILO: Dispositivo para la medición del grosor y/o la longitud de objetos de consistencia sólida o gelatinosa, en especial, objetos farmacéuticos […]
DISPOSITIVO PARA MEDIR EL GROSOR Y/O LA LONGITUD DE OBJETOS, del 9 de Marzo de 2011, de KRAEMER, THILO: Dispositivo para la medición del grosor y/o la longitud de objetos de consistencia sólida o gelatinosa, en especial, objetos farmacéuticos […]
Rodamiento que comprende un captador de desplazamiento angular, del 17 de Junio de 2020, de HUTCHINSON: Rodamiento que comprende un casquillo de rodamiento y un captador inductivo de desplazamiento angular de dicho casquillo de rodamiento, comprendiendo […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Codificador giratorio, del 22 de Abril de 2020, de CMR Surgical Limited: Un codificador de posición para detectar la posición giratoria relativa de la primera y segunda partes alrededor de un eje de rotación, […]
Procedimiento y aparato para codificación magnética seccional continua para medición de par en ejes grandes, del 18 de Marzo de 2020, de GENERAL ELECTRIC COMPANY: Procedimiento para codificación de un eje , de acuerdo con la reivindicación 6, que comprende: (a) suministrar corriente a una primera posición […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Encoder de posición absoluta, del 28 de Agosto de 2019, de FAGOR AUTOMATION S.COOP: Encoder de posición absoluta, que comprende una regla graduada con una pista incremental y una pista absoluta , y una cabeza lectora que puede […]
 Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]