Convertidor de movimiento lineal alterno (ida y vuelta) en circular unidireccional.
Convertidor de un movimiento lineal alterno (ida y vuelta) en uno circular unidireccional,
que consta básicamente de tres partes: dos engranajes emparejados, una doble barra dentada envolvente y un soporte-guía. La fuerza se aplica sobre la doble barra envolvente cuyos dientes internos hacen girar a ambos engranajes emparejados de forma sincronizada, continua y unidireccionalmente. Uno de los engranajes emparejados lleva solidaria y lateralmente otra rueda dentada para transmitir el movimiento circular obtenido mediante una cadena o correa allá donde se necesite.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200801930.
Solicitante: ZIGNOLI SANTERO, ÁNGEL ASTERIO.
Nacionalidad solicitante: España.
Inventor/es: ZIGNOLI SANTERO,ÁNGEL ASTERIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H19/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 19/00 Transmisiones que implican esencial y únicamente engranajes u órganos de fricción y que no pueden transmitir un movimiento rotativo indefinido (con órganos de accionamiento intermitente F16H 27/00 - F16H 31/00). › implicando una cremallera y piñón.
Fragmento de la descripción:
Convertidor de movimiento lineal alterno (ida y vuelta) en circular unidireccional.
Campo técnico de la invención
El objetivo de este invento consiste en conseguir un movimiento rotatorio a partir del movimiento recto de ida y vuelta con la trayectoria mostrada en la figura 1.
Este invento pertenece globalmente al conjunto de desarrollos mecánicos que transforman movimiento recto en movimiento circular o rotatorio. Si bien en esta invención se pretende que su principal aplicación sea propulsar carros, bicicletas o vehículos en general.
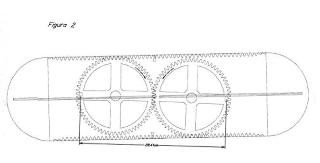
Comprende básicamente tres partes: dos engranajes emparejados, una pieza de empuje consistente en unas barras dentadas y envolventes, y un soporte-guía.
La fuerza se aplica sobre la pieza de empuje envolvente, cuyos dientes hacen girar a ambos engranajes de forma constante, sincronizada, y unidireccionalmente.
Uno de los engranajes emparejados (o los dos) llevará, solidaria y lateralmente unida, una rueda dentada encargada de transmitir, mediante una cadena o correa, la fuerza de tracción allá donde se necesite.
Estado de la técnica
Hasta hoy, la forma usada es el conocido método de biela-manivela.
Existen también diversas patentes que convierten movimientos rectos en circulares o curvos, pero mayormente para aplicaciones no orientadas a desplazamientos de carros u objetos pesados.
Descripción de la invención
A fin de conseguir un mecanismo que permita transformar dicho movimiento lineal alterno en un movimiento rotacional con un elevado rendimiento mecánico, la invención propone un sistema convertidor que consta básicamente de 3 partes:
a) unos engranajes emparejados, consistentes en dos ruedas dentadas con unos rodamientos en sus centros.
b) una pieza de empuje; consta de dos barras dentadas enfrentadas entre sí y unidas mediante arcos semicirculares por sus extremos; de manera que rodean externamente a ambos engranajes y realizan así la doble tracción (figuras 15, 16 y 17).
c) una estructura base; soporta los demás elementos y guía la pieza de empuje. Sobre ella pivota la pieza de empuje durante los cambio de dirección. En esta estructura también están las ramas de unión y sujeción a la máquina en la cual el convertidor vaya alojado (figuras 18, 19 y 20).
En la figura 2 se representan de forma simplificada para entender la idea.
Para darle la utilidad práctica se añadiría, solidariamente con una de las ruedas dentadas (o en ambas) otra rueda dentada para extraer de ella la tracción, es decir, que haga de transmisión, por ejemplo a través de una cadena o correa, (solo la represento en la figura 23, en las demás no, para simplificar dibujos y poner más énfasis en la idea principal).
Sobre la base o soporte-guía van montados los engranajes mediante sus rodamientos (figura 21); las barras de la pieza de empuje encajarían con estos engranajes, y también con el soporte-guía, de forma que queda sujeta, y solamente puede moverse dentro de la trayectoria mostrada en la figura 1.
La trayectoria del movimiento se compone de dos tramos rectos, una de ida y otra de vuelta, que tienen una pequeña inclinación respecto a la horizontal; +2,8125º la ida y -2,8 125º la vuelta (o viceversa), más un semicírculo en cada extremo (ver figura 1); de manera que en los extremos del recorrido se sigue una trayectoria curva, para enlazar el fin de la ida con el principio de la vuelta, y viceversa, (toda la trayectoria se realiza dentro de un mismo plano).
Esto no solo supone la eliminación de puntos de inercia nulos en los extremos, como ocurriría si los tramos de ida y de vuelta estuvieran dentro de la misma línea (misma inclinación y mismo plano), sino que además, al reconducir la trayectoria para cambiar de dirección, nos devuelve la fuerza o inercia del final de cada tramo recto para empezar el siguiente tramo recto; es decir, conserva la energía de la inercia en forma de fuerza centrífuga, en vez de desperdiciar esta energía si hubiera que parar para cambiar de dirección.
Las trayectorias rectas son para el empuje, y con ello se produce la tracción, y las curvas son 5 para el "cambio de dirección".
Defino un punto llamado "centro del sistema" (CdS), que se sitúa en el punto central centro del recorrido y coincide con el cruce de las dos trayectorias rectas (ida y vuelta); es equidistante entre los centros de los engranajes emparejados.
La trayectoria global es simétrica horizontal y verticalmente respecto de este punto "CdS", (ver figura 1).
El funcionamiento consiste en empujar la pieza de empuje, para que haga rotar los engranajes durante las partes rectas de la trayectoria (figura 2).
Según nos acercarnos a algún extremo llegamos al punto final del tramo recto, que es el principio del cambio de dirección (tramos curvados). Las figuras 3 hasta 14 muestran diversos momentos (ángulos) del cambio de dirección, desde los +2,8125º (figura 3) hasta los -2,8125º (figura 14). La línea discontinua con flechas de la figura 3 muestra el sentido de giro de la pieza de empuje.
Ya que el diseño y el recorrido o trayectoria son simétricos respecto del "CdS", solo represento el cambio de dirección para un lado.
El control del cambio de dirección se realiza únicamente mediante la interacción de los dientes implicados. Los dientes de la pieza de empuje controlan a los dientes de los engranajes, de manera que el giro de los engranajes se adapta al giro de la pieza de empuje.
Durante el cambio de dirección, se frenan progresivamente (no repentinamente) los engranajes emparejados hasta parar e incluso invertir muy brevemente el sentido de giro de dichos engranajes emparejados, esto es necesario para poder sincronizar el acoplamiento entre los dientes de la pieza de empuje con los de las ruedas dentadas.
De esta manera, durante el cambio de dirección, no se transmite empuje (ni se produciría entonces tracción o motricidad); liberando así de tensión al mecanismo para que dicho cambio sea más suave, controlado y seguro. Es decir, normalmente solo habrá tracción y fuerza motriz durante las trayectorias rectas.
Voy a explicarlo asumiendo que el movimiento (trayectoria total) se realiza dentro de un plano vertical, por considerarlo más práctico (la gravedad favorece el cambio de dirección) y didácticamente comprensible; no obstante su funcionamiento en horizontal u otro plano no vertical sería posible, mediante pocas y sencillas variaciones.
Durante los tramos rectos podemos invertir la dirección, lo que haría que los engranajes emparejados girasen en sentido contrario, y dependiendo de cómo se implemente la transmisión, causarían tracción o no (similar al pedaleo de una bicicleta).
Pero durante la trayectoria curva del cambio, no es posible invertir la dirección, debido al diseño de los 3 últimos dientes que hay en los extremos de la barra de empuje (filas inferior y superior), que son diferentes a los del resto de la barra.
Debido a ello, y como lo lógico es que el cambio se haga con la fuerza de gravedad a favor, recomiendo su uso haciendo que las trayectorias rectas sean ascendentes y las de cambio, descendentes.
Puede existir la posibilidad de diseñar los dientes (su forma) de manera que el cambio de dirección bidireccional sea posible; no obstante, en mi diseño he preferido dar prioridad a la mayor seguridad y fiabilidad de funcionamiento haciendo que el cambio de dirección se haga de forma más óptima y segura, al aprovechar la gravedad (desde arriba hacia abajo), ya que implica menos tensión mecánica y menor gasto energético en su funcionamiento.
Respecto a las posibilidades de sujeción que unen al sistema convertidor con la máquina en la que va integrado, hay varias opciones que dan gran posibilidad de adaptación, ya que hay cuatro posibles puntos de sujeción en la vista frontal de la figura 18 y tres más por el otro lado de la estructura base (vista trasera en figura 19). De todas ellas quizás la más sencilla sea en el interior de los agujeros en donde se montan los rodamientos de las ruedas dentadas.
Mencionar también la posibilidad de obtener la motricidad a la misma vez desde dos puntos diferentes, (uno en cada engranaje emparejado) para dos aplicaciones diferentes, pudiendo ir estos sincronizadas sin que haya contacto entre ellos.
...
Reivindicaciones:
1. Convertidor de movimiento lineal alterno en rotatorio, caracterizado porque comprende los siguientes componentes:
a) "Pieza de empuje". Es la pieza rígida que se somete al movimiento lineal alterno (ida-vuelta). Está formada por dos barras rectas, dentadas por una parte (cremallera o hilera de dientes). Dichas barras dentadas se mantienen siempre paralelas y separadas a una distancia fija, al estar sus extremos unidos solidariamente a otras dos barras semicircunferenciales, y de forma en que los dientes de cada barra estén enfrentadas entre sí.
b) Dos ruedas dentadas (engranajes), acopladas entre sí (engranadas), y que también están, cada una de estas ruedas, acoplada con una de las cremalleras o hilera dentada de la "pieza de empuje"; (cada rueda con una barra dentada diferente). Dichas ruedas dentadas son las que propiamente convierten el movimiento lineal o recto de la pieza de empuje en circular; extrayendo por tanto el movimiento rotatorio de la rueda dentada para su uso o utilidad final.
c) "Soporte-guía". Es una estructura rígida e inmóvil. Soporta a las ruedas dentadas por sus ejes, y las mantiene a distancia fija. También guía y conduce a la pieza de empuje, forzando a esta a seguir una trayectoria que, en su punto medio geométrico (punto de simetría) se asemeja a un lazo horizontal parecido a un ocho caído y estirado horizontalmente (
Para forzar la trayectoria, la "pieza de empuje" dispone de una barra longitudinal discontinua (en tramos) - "barra-guía" - que va guiada firmemente entre unos resaltes o salientes que hay en el "soporte-guía" (protuberancias de guía y apoyo).
Las barras dentadas siempre aplican su fuerza durante los tramos rectos de trayectoria en posición perpendicular a su correspondiente engranaje, por lo que el rendimiento mecánico del convertidor es alto.
2. Convertidor de movimiento lineal alterno en rotatorio según la reivindicación 1ª, caracterizado porque se puede diseñar y realizar con más de una barra-guía en la pieza de empuje, cada una de ellas con sus correspondientes resaltes (protuberancias de guía y apoyo) en la estructura de soporte-guía.
Patentes similares o relacionadas:
Sistema de suministro de energía undimotriz-eólica complementario para la generación de energía continua, del 8 de Enero de 2020, de Weng, Wen-kai: Sistema de suministro de energía undimotriz-eólica complementario para generación de energía continua, que comprende: un módulo de energía cinética de la ola , que […]
Deslizador activo de reposicionamiento de quinta rueda, del 6 de Noviembre de 2019, de SAF-HOLLAND, INC: Una disposición de ajuste de enganche de quinta rueda para ajustar una posición de una placa de enganche de quinta rueda a lo largo de una […]
 Válvula, del 30 de Octubre de 2019, de Goodwin Plc: Una válvula de pistón axial accionable que comprende: una varilla de pistón , un pistón de válvula y un sistema de engranaje para transformar el movimiento […]
Válvula, del 30 de Octubre de 2019, de Goodwin Plc: Una válvula de pistón axial accionable que comprende: una varilla de pistón , un pistón de válvula y un sistema de engranaje para transformar el movimiento […]
Sistema de accionamiento para puerta corredera automática, del 23 de Octubre de 2019, de Autoslide Pty Ltd: Sistema de accionamiento para puerta corredera automática , incluyendo el sistema de accionamiento : un accionador ; y, […]
MECANISMO DE CONVERSION DE MOVIMIENTO DE VAIVEN EN ROTATORIO UNIDIRECCIONAL, del 30 de Abril de 2019, de CARMONA UTRERA, Agustín: 1. Mecanismo de conversión de movimiento de vaivén en rotatorio unidireccional, constituido por un chasis caracterizado por comprender […]
Engranaje y procedimiento de fabricación para un engranaje, del 20 de Marzo de 2019, de WITTENSTEIN SE: Engranaje , en especial engranaje coaxial o engranaje lineal, con - un dentado , - un soporte de dientes con guías orientadas radialmente, - […]
Pareja de engranajes de una plataforma auto-elevable, del 1 de Febrero de 2017, de Flender GmbH: Pareja de engranajes de una plataforma auto-elevable para un accionamiento de cremallera para descender y elevar una pata auto-elevable (jack-up) de […]
Dirección hidráulica de vehículos y artefactos automotores, del 27 de Abril de 2016, de PELLENC (SOCIETE ANONYME): Dirección hidráulica para vehículos y artefactos automotores que incluyen al menos dos ruedas directrices (5a, 5b) y que comprenden un volante de maniobra […]