7 inventos, patentes y modelos de LARSSON, JAN
Pilar en forma de B y método de fabricación.
Sección de la CIP Técnicas industriales diversas y transportes
(20/04/2016). Solicitante/s: GESTAMP HARDTECH AB. Clasificación: B62D25/04.
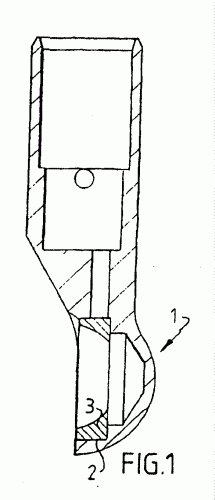
Un pilar en forma de B que está formado por una pieza elemental de placa para un perfil en forma de sombrero con un ala central , dos costados y dos alas laterales y tiene una placa de refuerzo sobre parte de su longitud que forma un pilar en forma de B de doble placa,
caracterizado por que
la placa de refuerzo se extiende sobre al menos 1/4 de su longitud sobre las alas laterales y se estrecha hacia abajo en sus dos extremos de modo que no se extiende hacia fuera sobre las alas laterales sobre parte de su longitud.
PDF original: ES-2624408_T3.pdf
Una brida portaherramienta para un robot industrial.
(26/11/2014) Una brida portaherramienta adaptada para disponerse en un brazo de un robot industrial a fin de conectar una herramienta a dicho brazo , en donde dicha brida portaherramienta comprende:
- un cuerpo que tiene una superficie primaria adaptada para conectarse a dicha herramienta y
- un saliente que se proyecta desde dicha superficie primaria y está concebido para acoplarse con un rebajo dispuesto en dicha herramienta a fin de proporcionar una alineación rotacional entre dicha herramienta y dicha brida portaherramienta ,
- estando dicha brida portaherramienta provista de un agujero pasante que se extiende a través de dicho saliente y dicho cuerpo , pudiendo conectarse…
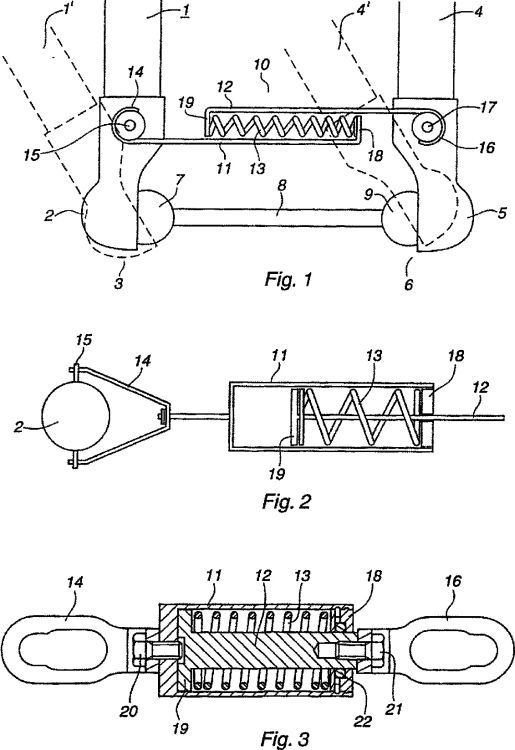
MANIPULADOR QUE COMPRENDE UNA ESTRUCTURA DE PARALELOGRAMO CON UN DISPOSITIVO DE MUELLE QUE EJERCE UNA FUERZA DE TRACCION.
Sección de la CIP Técnicas industriales diversas y transportes
(03/12/2009). Ver ilustración. Solicitante/s: ABB AB. Clasificación: B25J17/02F3, B25J17/02.
Un manipulador que comprende una articulación con al menos dos enlaces en sus extremos, y un dispositivo de muelle que ejerce una fuerza de tracción entre los enlaces, caracterizado porque el dispositivo de muelle comprende un primer dispositivo de estiramiento (119 con un primer dispositivo en ángulo , un segundo dispositivo de estiramiento con un segundo dispositivo en ángulo , que están dispuestos, desplazables en paralelo, lado a lado, y un dispositivo de muelle dispuesto entre los dispositivos en ángulo, resultando la fuerza de tracción por el miembro de muelle que ejerce una fuerza de compresión contra los dispositivos en ángulo, y porque el primer dispositivo de estiramiento comprende una carcasa configurada en forma de manguito y el primer dispositivo en ángulo comprende un miembro extremo asociado con la carcasa, donde la carcasa encierra el miembro de muelle.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes
(16/09/2006). Ver ilustración. Solicitante/s: ABB AB. Clasificación: F16C11/06, B25J17/02.
Dispositivo de robot que incluye por lo menos un dispositivo de enlace en el que las varillas de freno están dispuestas en un sistema de juntas múltiples donde las juntas incluyen juntas de rótula y casquillo de tres ejes que comprenden un casquillo que encierra una rótula con un espacio que comprende la mitad de una esfera ó menos caracterizado por el hecho de que el cojinete radial de bolas está sujeto para que no gire dentro de la carcasa en el casquillo de la junta y donde la carcasa incluye una superficie en cuya proximidad está situado el cojinete radial de bolas y que la superficie está diseñada con medios que aumentan la fricción.
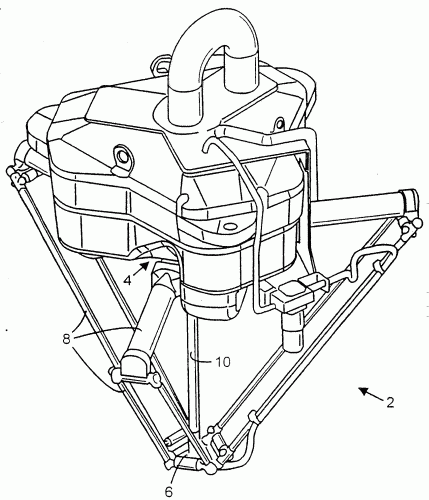
ROBOT INDUSTRIAL SEGUN EL CONCEPTO DELTA CON UN EJE TELESCOPICO ROTATIVO.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes
(16/04/2006). Ver ilustración. Solicitante/s: ABB AB. Clasificación: F16B7/10, B25J18/02.
Robot industrial según el concepto delta con un sistema de brazo destinado a girar en el espacio, incluyendo una sección de base , una placa móvil , varias varillas de tracción de articulaciones múltiples y un eje telescópico dispuesto entre la sección de base y la placa móvil, donde extremos opuestos de las varillas de tracción y el eje telescópico están conectados con la sección de base y la placa móvil respectivamente, y donde el eje telescópico incluye un eje interior y un tubo externo dispuesto en el eje interior y desplazable con relación al eje interior en una dirección longitudinal, caracterizado porque un casquillo torsional rígido está dispuesto de forma estacionaria en el tubo exterior en el que el eje interior está montado de manera que se pueda desplazar.
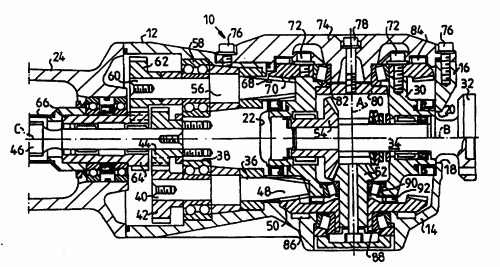
UNIDAD DE MUÑECA PARA ROBOT INDUSTRIAL.
Sección de la CIP Técnicas industriales diversas y transportes
(01/12/1999). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Clasificación: B25J9/10, B25J17/02.
LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EL ALOJAMIENTO DE LA UNIDAD ARTICULADA , QUE TIENE DOS BRAZOS DE HORQUILLA , SOPORTA UN ALOJAMIENTO DE INCLINABLE MONTADO DE FORMA PIVOTANTE , QUE A SU VEZ SOPORTA UN PLATAFORMA GIRATORIA MONTADA DE FORMA ROTATIVA SOBRE LA QUE SE PUEDE MONTAR UN ELEMENTO EXTERNO. EL ALOJAMIENTO INCLINABLE SE ENCUENTRA CONFINADO DE FORMA POSITIVA ENTRE EL BRAZO DE HORQUILLA PARA IMPEDIR ASI QUE LAS FUERZAS REACTIVAS DERIVADAS DE LOS ENGRANAJES PRESENTES EN EL ALOJAMIENTO FUERCEN A LOS BRAZOS DE HORQUILLA A SEPARARSE.
UNIDAD DE MUÑON ROBOTICO INDUSTRIAL.
(16/03/1999) LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EN EL ALOJAMIENTO DE LA UNIDAD ARTICULADA HAY MONTADOS DE FORMA ROTATIVA UN PRIMER Y UN SEGUNDO EJES DE ACCIONAMIENTO SECUNDARIOS , PREFERENTEMENTE PARALELOS, SOBRE CUYOS EXTREMOS DE ENTRADA HAY MONTADOS UNOS ENGRANAJES PREFERENTEMENTE CILINDRICOS PARA ACOPLARSE A UN ENGRANAJE DE ACCIONAMIENTO CILINDRICO CORRESPONDIENTE QUE HAY SOBRE UN EJE DE ACCIONAMIENTO PRIMARIO CORRESPONDIENTE DEL BRAZO DEL ROBOT . VISTO DESDE UNA PROYECCION FINAL, LOS ENGRANAJES Y LOS ENGRANAJES DE ACCIONAMIENTO SE ENCUENTRAN COLOCADOS DE TAL MODO QUE UN LINEA IMAGINARIA (L), QUE…
{kind=link}
{kind=link}
{kind=link}
{kind=link}