Procedimiento y dispositivo para controlar una fresadora.
(07/08/2019) Procedimiento para el control de una fresadora, con el que con la ayuda de un parámetro (Iqnom) variable en el tiempo de un control numérico (NC) se supervisa una mecanización fresadora, en el que el parámetro (Iqnom) se supervisa para determinar si se excede o no se alcanza un valor límite durante la mecanización fresadora, en el que en la curva temporal del parámetro (Iqnom) se filtra la frecuencia de engrane de los dientes (FZ) de una fresadora, en el que el parámetro (Iqnom) medido en un ciclo fijo (Tf) es procesado por un convertidor de tasas de exploración , que transfiere el parámetro (Iqnom) con un ciclo variable (Tv) para el procesamiento posterior, en el que…
(23/08/2017) Control numérico para el funcionamiento de una máquina herramienta con varios ejes, con un regulador del accionamiento para cada eje a controlar, en el que los reguladores del accionamiento se pueden parametrizar a través de parámetros de la maquina (Kp, Ki, Kd, MP, Tt) y de esta manera se pueden adaptar a las más diferentes máquinas herramientas, caracterizado porque en puntos de toma en los reguladores del accionamiento se pueden seleccionar magnitudes de regulación variables (wnom, wact, Iqnom, Iqact, Unom, vnom, anom, I_int) y parámetros de la máquina (Kp, Ki, Kd, MP, Tt) y se pueden ramificar a partir del regulador del accionamiento, para ser utilizados como argumentos o parámetros de una función definida por el usuario, de manera que el valor de partida sirve para…
Estructura de regulador para varias unidades de accionamiento acopladas mecánicamente.
(26/02/2014) Estructura de regulador para más de dos unidades de accionamiento acopladas mecánicamente a unelemento móvil , en donde la estructura de regulador presenta un solo aparato de medición de posición paradeterminar una posición real (Xact) del elemento móvil y un regulador de posición para calcular una velocidadnominal (Vnom) válida para todas las unidades de accionamiento a partir de una posición nominal (Xnom) y laposición real (Xact), y en donde el aparato de medición de posición y el regulador de posición sirven paratodas las unidades de accionamiento de manera conjunta, en donde la unidad de accionamiento disponede un regulador de velocidad propio , caracterizada por que una unidad de accionamiento estáconfigurada como unidad maestra superior, y que las unidades de accionamiento subordinadas a esta unidadmaestra están configuradas…
ESTRUCTURA DE REGULADOR QUE COMPRENDE UN MODELO DE TORSION.
Secciones de la CIP Física Electricidad Técnicas industriales diversas y transportes
(21/05/2009). Ver ilustración. Solicitante/s: DR. JOHANNES HEIDENHAIN GMBH. Clasificación: G05B13/02, H02P6/00, G05B19/416, G05B19/404, G05B19/19, B23Q15/00, G05B11/00.
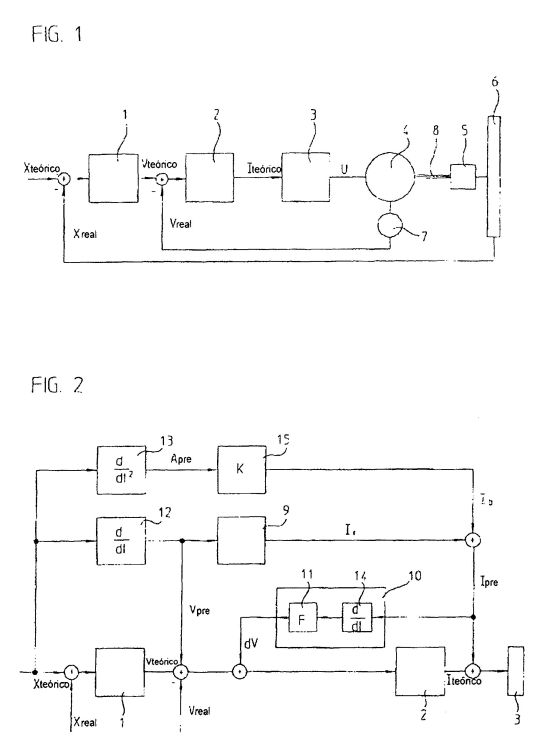
Estructura de regulador para la regulación de posición de un objeto , que se acciona mediante una mecánica por un motor , con un regulador de posición para la formación de un valor teórico de revoluciones (Vteórico) a partir de un valor teórico de posición (Xteórico) y un valor real de posición (Xreal), seguido de un regulador de número de revoluciones para la formación de un valor teórico de corriente (Iteórico) a partir del valor teórico de revoluciones (Vteórico) y un valor real de revoluciones (Vreal), así como un circuito para la formación de una corriente de control previo (Ipre) a partir del valor teórico de posición (Xteórico), donde la corriente de control previo (Ipre) se conecta al valor de corriente teórica (Iteórico), caracterizada porque la corriente de control previo (Ipre) se conecta además a un modelo para el control previo de torsión, cuya señal de salida (dV) se conecta al valor teórico de revoluciones (Vteórico).
METODO PARA EL ACCIONAMIENTO DE UN FRENO DE PARADA.
Sección de la CIP Física
(01/06/2008). Ver ilustración. Solicitante/s: DR. JOHANNES HEIDENHAIN GMBH. Clasificación: G05B13/02.
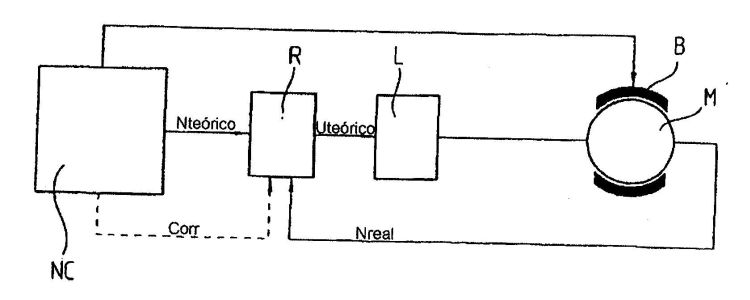
Un método para accionar un freno de parada (B) de un accionamiento eléctrico, que comprende un motor (M) y un circuito de regulación (R) con parámetros de regulación (KP, KI), donde al menos uno de los parámetros de regulación (KP, KI) se modifica, caracterizado por una primera etapa de acuerdo con la cual el al menos un parámetro de regulación, (KP, KI) se modifica incluso antes de encajar el freno de parada (B) de tal forma que al encajar el freno de parada (B) con un circuito de regulación (R) activo al mismo tiempo, en la segunda etapa se evitan o disminuyen en gran medida oscilaciones.
UN DISPOSITIVO PARA LA GENERACION DE MAGNITUDES DE GUIA PARA CIRCUITOS REGULADORES DE UNA MAQUINA CON CONTROL NUMERICO.
(01/07/2007) Disposición para la generación de magnitudes de guía para circuitos reguladores de una máquina con control numérico, compuesta por una unidad de interpolación para la fijación previa de valores teóricos de posición con una determinada frecuencia de muestreo del interpolador y con una unidad de interpolación fina que está posconectada en serie a la unidad de interpolación y genera, a partir de valores teóricos de posición en el lado de la entrada, magnitudes de guía del lado de la salida para uno o varios circuitos reguladores posconectados, donde la unidad de interpolación fina genera las magnitudes de guía en la retícula de tiempo de los circuitos reguladores con la frecuencia de muestreo del circuito regulador, caracterizada porque la unidad de interpolación fina incluye un transductor de frecuencias de muestreo , así…
{kind=link}
{kind=link}