6 inventos, patentes y modelos de IDIGORAS LEIBAR,IGONE
SISTEMA ROBÓTICO QUIRÚRGICO Y MÉTODO PARA MANEJAR UN SISTEMA ROBÓTICO QUIRÚRGICO.
(28/12/2017) Un sistema robótico quirúrgico que comprende: unidades robóticas, cada una de las cuales es independiente de las demás y comprende un soporte y un conjunto de brazo robótico ; dicho soporte comprende medios de movimiento y está configurado para cambiar la posición y la orientación del soporte con respecto a la mesa ; dicho conjunto de brazo robótico comprende: un brazo robótico , una herramienta quirúrgica acoplada a este y un sensor de fuerza configurado para recibir la medición de las fuerzas y de los pares aplicados por la herramienta . El sistema comprende también una consola de control configurada para manejar a distancia dichas unidades robóticas, que comprende: un medio de computación ; dispositivos…
DISPOSITIVO DE CAMBIO AUTOMATICO DE GARRA DE ROBOT CON TRANSMISION HIDRAULICA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/01/2001). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Clasificación: B25J15/04.
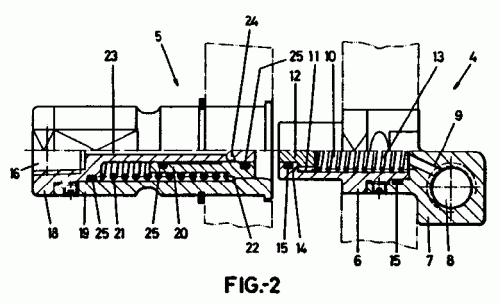
Dispositivo de cambio automático de garra de robot con transmisión hidráulica. El dispositivo forma parte de un acoplamiento por enchufe rápido de la garra que porta la herramienta al brazo de un robot, estando constituido por dos piezas y , dotadas de correspondientes orificios y de enchufe de los conductos de alimentación hidráulica del brazo del robot y de la herramienta acoplada en aquel, contando además esas piezas y con respectivas piezas móviles y desplazables axialmente y que obturan en posición de reposo los correspondientes extremos de tramos y que dan continuidad a los conductos que comunican, en cada pieza, con los orificios de conexión y , de manera que en el enfrentamiento y acoplamiento entre ambas piezas y se produce el retraimiento de las piezas móviles y y la comunicación de los tramos de conducto y , estableciéndose un paso de fluido entre los orificios de entrada y de salida . Figura 2.
AMORTIGUADOR DE VIBRACIONES PARA HERRAMIENTA DE ROBOT.
Sección de la CIP Técnicas industriales diversas y transportes
(16/01/2001). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Clasificación: B25J19/00.
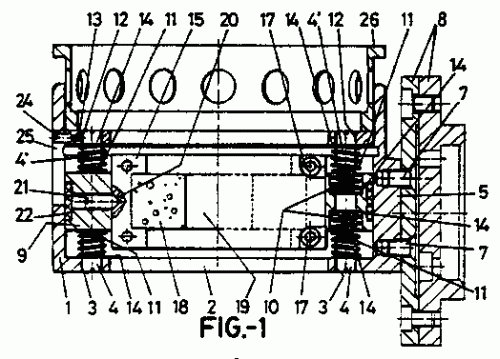
Amortiguador de vibraciones para herramienta de robot. El amortiguador se constituye a partir de un cuerpo de soporte , a modo de cazoleta, que es fijable al brazo de un robot. Interiormente cuenta con medios elásticos debidamente guiados y apoyados en rehundidos previstos en ambas caras de una pieza anular , la cual está montada libremente en el interior del cuerpo . Concéntricamente a la pieza existe una pieza formada por dos mitades entre las que queda situado un taco circular de goma con un paso axial para el amarre, mediante el apriete de ambas mitades, de la herramienta correspondiente. Los elementos elásticos y las piezas internas al cuerpo quedan retenidas en el interior de éste mediante una tapa cuyo apriete es variable para poder regular el tensado de los elementos elásticos . El amortiguador obtenido absorbe las vibraciones transmitidas por la herramienta acoplada, evitando que las mismas lleguen al brazo del robot en el que es aplicable el conjunto. Figura 1.
ACOPLAMIENTO, CON RIGIDEZ VARIABLE, PARA HERRAMIENTA DE ROBOT.
Sección de la CIP Técnicas industriales diversas y transportes
(01/12/2000). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Clasificación: B25J18/06.
Acoplamiento, con rigidez variable, para herramienta de robot. El Acoplamiento está constituido por un cuerpo tubular de naturaleza elástica, cuyos extremos 0 embocaduras se cierran mediante sendas bridas y para el montaje de la correspondiente herramienta y del brazo del robot, respectivamente, y en cuyo interior se inyecta un fluido, cuya presión puede variarse a voluntad, de tal manera que en los desplazamientos y posicionamientos del brazo del robot, la presión del citado fluido difiera de la aplicada durante las operaciones de trabajo del robot. Este cuerpo tubular se complementa, opcionalmente, con un elemento retenedor envolvente helicoidal que evita las deformaciones excesivas de aquel cuando en el interior de la cámara que constituye el mismo se inyecta aire u otro fluido a presión. Figura 1.
SISTEMA PARA ACABADO SUPERFICIAL DE PIEZAS CON CONTROL ACTIVO DE ESFUERZOS.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/2000). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Clasificación: B24B49/16, B24B21/20.
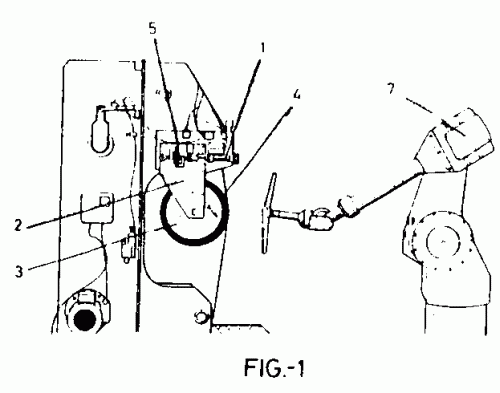
Sistema para acabado superficial de piezas con control activo de esfuerzos. En este sistema la fuerza ejercida sobre la pieza a pulir por la rueda o banda abrasiva es debida a la presión generada en las cámaras de un cilindro neumático que gobernado por una servoválvula , acciona el eje de traslación de la rueda , utilizándose además una célula de carga , colocada paralelamente a la dirección normal a la superficie de contacto entre pieza y banda, para recoger, en tiempo real, los valores de la fuerza ejercida por la rueda o banda sobre la pieza, enviándose estos valores a un sistema de control , basado en microprocesador, y provisto de los algoritmos de control adecuados para calcular las desviaciones existentes respecto de los valores teóricos y generar, en consecuencia, los valores de actuación sobre la citada servoválvula . Figura 1.
PROCEDIMIENTO DE DESMONTAJE ROBOTIZADO DE APARATOS ELECTRICOS Y HERRAMIENTA CORRESPONDIENTE.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(01/05/1999). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Clasificación: B25B27/14, G05B19/18, B26D5/12, B26D5/10.
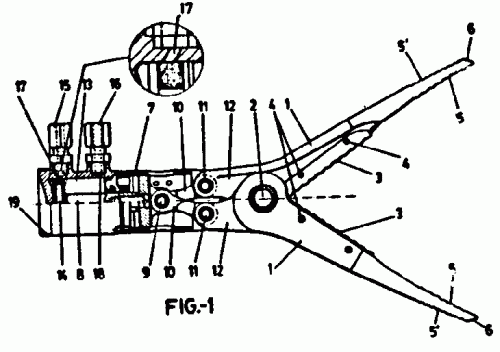
EL PROCEDIMIENTO CONSISTE EN SEPARAR LOS COMPONENTES O PIEZAS DEL APARATO ELECTRICO QUE SE PRETENDE DESMONTAR, SIN NECESIDAD DE DESATORNILLADO O DESTRUCCION DE LAS UNIONES ENTRE DICHOS COMPONENTES, UTILIZANDO PARA ELLO UNA HERRAMIENTA CONSTITUIDA POR DOS BRAZOS ARTICULADOS ENTRE SI A MODO DE TIJERA, CON CUCHILLAS DE CORTE EN SUS CARAS INTERNAS Y CON UNAS PROLONGACIONES POSTERIORES EN LAS QUE ARTICULAN SENDAS BIELAS CON UNA ARTICULACION COMUN , ESTANDO ESAS BIELAS VINCULADAS A UN PISTON DE DOBLE EFECTO MONTADO SOBRE UNA CARCASA , DE MANERA QUE EL DESPLAZAMIENTO EN UNO U OTRO SENTIDO DEL PISTON LLEVA CONSIGO EL BASCULAMIENTO DE LAS BIELAS Y POR LO TANTO EL CIERRE Y/O APERTURA DE LOS BRAZOS PARA EFECTUAR LA OPERATIVA DE DESMONTAJE CORRESPONDIENTE.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}