7 inventos, patentes y modelos de GARREC, PHILIPPE
Miembro inferior de un exoesqueleto o de un robot bípedo.
Sección de la CIP Técnicas industriales diversas y transportes
(13/07/2016). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES. Clasificación: B25J9/00.
Miembro inferior de exoesqueleto o de robot bípedo, que comprende un segmento de muslo , un segmento de pierna , y un pie , caracterizado por que el segmento de pierna comprende dos bielas (3a, 3b, 103a, 103b; 203a, 203b) que tienen extremos proximales que están articulados según ejes paralelos sobre el segmento de muslo, teniendo las dos bielas extremos distales articulados según ejes paralelos sobre el pie.
PDF original: ES-2634526_T3.pdf
Procedimiento para la compensación de fricción en un dispositivo de retroalimentación de fuerza equipado de una transmisión de cable.
(17/04/2013) Procedimiento de compensación de fricción en un dispositivo de retroalimentación de fuerza comprendiendo unórgano de mando manipulado por un usuario y acoplado a un cable tirante accionado por un motorreductor , el cual comprende las etapas de:
- detectar una variación de flecha del cable ocasionada por una manipulación del órgano de mando;
- en respuesta a esta detección, accionar el motorreductor para que desarrolle un esfuerzo (Fa) compensando almenos parcialmente los rozamientos internos (Rsa) del motorreductor oponiéndose a un movimiento del órgano demando manipulado por el usuario.
BRAZO DE TELEMANIPULACION EN DOS PARTES.
(16/11/2008) Brazo de telemanipulación, que comprende un brazo maestro manejado por un operador, un brazo esclavo que comprende un primer segmento , tubular, encastrado a través de una pared y otros segmentos que terminan en un órgano de manipulación , componiendo dichos segmentos un tren articulado , estando el brazo maestro y el brazo esclavo desprovistos de transmisión mecánica directa que los una, pero provistos de un sistema de interfaz que comprende una parte de control y una parte motriz , estando la parte motriz acoplada al segmento tubular y comprendiendo motores de mando de transmisiones mecánicas incluidas…
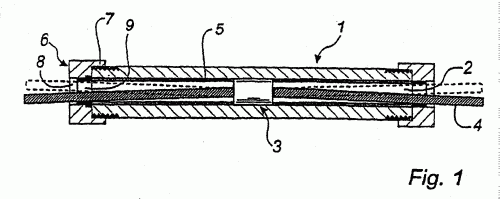
TRANSMISION DE TORNILLO, TUERCA Y CABLE FIJADO AL TORNILLO.
Secciones de la CIP Electricidad Mecánica, iluminación, calefacción, armamento y voladura
(16/06/2004). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Clasificación: H02K7/06, F16H25/20.
Transmisión, compuesta por un órgano longilíneo , un motor , y un conjunto de tornillo y tuerca , haciendo la tuerca deslizar al tornillo, cuya tuerca está arrastrada por el motor y el órgano está fijado al tornillo de manera que comanda el movimiento del órgano por medio del tornillo y mediante una conversión de movimiento entre una rotación de la tuerca y una traslación del tornillo, siendo una combinación del órgano y de un medio de sujeción del órgano al tornillo flexible en cuanto a posición angular con respecto al tornillo, caracterizada porque el tornillo está ahuecado mediante una cavidad axial, y porque el medio de sujeción está alojado en la cavidad.
Sección de la CIP Técnicas industriales diversas y transportes
(01/10/1998). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Clasificación: B25J18/02.
SISTEMA TELESCOPICO FORMADO CON MODULOS CUYO ELEMENTO ESENCIAL ES UN SISTEMA DE TORNILLO Y TUERCA . SEGUN LA INVENCION, UNA TRANSMISION MECANICA IMPONE ROTACIONES DE RELACION CONSTANTE Y DIFERENTE DE LA UNIDAD ENTRE EL TORNILLO Y LA TUERCA, Y POR CONSIGUIENTE UNA TRASLACION DETERMINADA DEL TORNILLO PARA UNA ROTACION DETERMINADA DE LA TUERCA. EL TORNILLO ESTA UNIDA A LA TUERCA DE LA SIGUIENTE ETAPA. EL DESPLIEGUE SIMULTANEO Y UNIFORME DE TODOS LOS MODULOS DEL SISTEMA SE CONTROLA ASI. ADEMAS, LOS TORNILLOS (56 Y 74) PUEDEN SER CONCENTRICOS Y EL SISTEMA NO ES MUY PESADO. APLICACION EN PARTICULAR EN LA ROBOTICA.
Sección de la CIP Técnicas industriales diversas y transportes
(01/07/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Clasificación: B62D57/02, B62D57/032.
PIE DE ROBOT MARCHADOR QUE COMPRENDE EN PARTICULAR UNOS MEDIOS DE ORIENTACION AUTOMATICA DE LA SUELA, UNOS CAPTADORES DE INCLINACION DE LA SUELA, UNOS CAPTADORES DE CONTACTO CON EL SUELO PARA VERIFICAR LA EXTENSION DEL APOYO, UNOS RESORTES AMORTIGUANTES DE COMPRESION DE LA ARMADURA DEL PIE PARA NO APLICAR EL ESFUERZO MAS QUE PROGRESIVAMENTE Y EVENTUALMENTE UN REBORDE LATERAL DE DETECCION DE OBSTACULOS. TODOS LOS MEDIOS CONTRIBUYEN A EXCLUIR APOYOS ARRIESGADOS.
GATO ELECTRICO CON SISTEMA DE CONVERSION DE MOVIMIENTO ROTACION/TRASLACION Y CON RECUPERACION DE ENERGIA.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Electricidad
(16/01/1996). Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Clasificación: F16H25/22, F16H19/02, H02P6/02.
SEGUN LA INVENCION EL GATO PERMITE UNA ECONOMIA DE ENERGIA CONSIDERABLE PORQUE APLICA UN SISTEMA MECANICO REVERSIBLE. UTILIZA PRINCIPALMENTE UNOS MEDIOS DE RECUPERACION DE ENERGIA, Y MAS EN PARTICULAR, UN SISTEMA TORNILLO /TUERCA , POR EJEMPLO DE BOLAS, CUYO ANGULO DE PASO DEL TORNILLO ES CONSIDERABLE (SUPERIOR A 5 ) O UN SISTEMA CON ARBOL LISO. VARIOS MOTORES PUEDEN SER COLOCADOS YA SEA EN LOS EXTREMOS, YA SEA EN EL INTERIOR DEL TORNILLO CUANDO ESTE ES HUECO. LA REVERSIBILIDAD DEL SISTEMA TORNILLO/TUERCA CON UN ANGULO MUY CONSIDERABLE PERMITE RECUPERAR, DURANTE LAS FASES DE DESACELERACION DE LAS CARGAS, UNA GRAN PARTE DE LA ENERGIA ELECTRICA QUE PUEDE SER REEXPEDIDA SOBRE LA RED DE ALIMENTACION O ALMACENADA EN UN CONDENSADOR . APLICACIONES MULTIPLES SOBRE TODO PARA LOS ROBOTS.
{kind=link}