CIP-2021 : G01S 5/16 : que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP-2021 › G › G01 › G01S › G01S 5/00 › G01S 5/16[1] › que utilizan ondas electromagnéticas que no sean ondas de radio.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
G01S 5/16 · que utilizan ondas electromagnéticas que no sean ondas de radio.
CIP2021: Invenciones publicadas en esta sección.
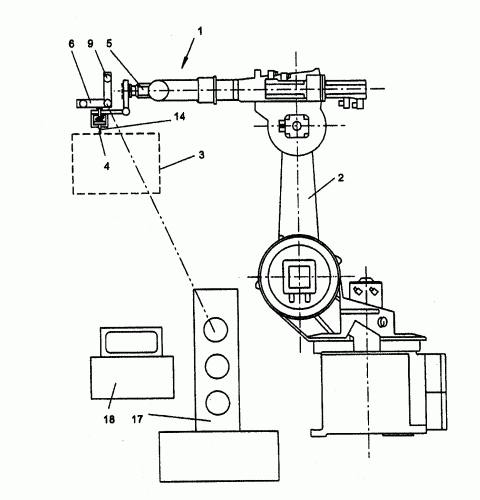
PROCEDIMIENTO Y DISPOSITIVO PARA MEDIR Y VERIFICAR PIEZAS.
(16/11/2001). Ver ilustración. Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Inventor/es: MOLLER, MATTHIAS.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y A UN DISPOSITIVO PARA MEDIR Y CONTROLAR PIEZAS DE LA CARROCERIA DE AUTOMOVILES . LA MEDICION SE REALIZA CON UNA SONDA MEDIDORA , QUE TIENE UNA GALGA Y UNO O VARIOS INDICADORES DE POSICION . UN MANIPULADOR COLOCA LA SONDA MEDIDORA CON LA GALGA SOBRE UNO O VARIOS PUNTOS DE MEDICION DE LA PARTE DE LA CARROCERIA . A CONTINUACION SE MIDEN LOS INDICADORES DE POSICION POR PARTE DE UN SISTEMA EXTERIOR OPTICO RELACIONADO CON EL LUGAR, A FIN DE DETERMINAR LA POSICION. LA POSICION DE LOS PUNTOS DE MEDICION SE OBTIENE A PARTIR DE LOS DATOS DE MEDIDA. LA SONDA MEDIDORA MANTENIDA POR EL MANIPULADOR PUEDE DESVIARSE DE MANERA ELASTICA CON RELACION A UNO O VARIOS EJES.
(01/03/2001) LA INVENCION HACE RELACION A UN SISTEMA SENSOR CON UN NUMERO DE ESTACIONES SENSORAS PARA LA VIGILANCIA DE UN AREA QUE SE PRETENDE INCLUYA UN OBJETO PARA SER PROTEGIDO. LAS ESTACIONES SENSORAS ESTAN ESENCIALMENTE DISTRIBUIDAS A LO LARGO DE LA PERIFERIA DE UN CIRCULO . CADA ESTACION SENSORA COMPRENDE UNA UNIDAD DETECTORA COLOCADA PARA ESCANEAR EL ARCO EN UN SECTOR ACIMUT ASIGNADO A ELLA EN DOS CAMPOS DE DETECCION . EL TIEMPO DE PASADA T DE UN OBJETIVO QUE PASA LOS DOS CAMPOS DE DETECCION SE MIDE Y SE CALCULA LA POSICION DEL OBJETIVO SOBRE LA BASE DEL TIEMPO MEDIDO T, LA VELOCIDAD DEL OBJETIVO VMISIL, EL ANGULO ENTRE LOS CAMPOS DE DETECCION ALFA Y EL ANGULO AL OBJETIVO BETA. EN EL SISTEMA SENSOR, EL ESCANEO…
PROCEDIMIENTO PARA LA DETERMINACION DE LA POSICION DE UN TRIEDRO EN EL ESPACIO.
(01/09/2000) ELPROCEDIMIENTO DE LOCALIZACION POSICIONAL DE UN TRIEDRO (O,X, Y, Z) EN EL ESPACIO, LLEVA LAS SIGUIENTES ETAPAS; SE COLOCA UN MODULO DE EMISION QUE COMPRENDE UN ZOCALO FIJO, UNA FUENTE DE RADIO LUMINOSO MONTADA SOBRE EL ZOCALO 83) PARA PIVOTAR ALREDEDOR DE DOS EJES DISTINTOS (Z,22) Y DOS DETECTORES DE POSICION ANGULAR ; SE DISPONE ALREDEDOR DEL MODULO DE EMISION , DIANAS QUE MUESTRAN SU ILUMINACION POR EL RAYO LUMINOSO; SE HACE PIVOTAR LA FUENTE DEL MODULO DE EMISION () DE MANERA QUE ALUMBRAR SUCESIVAMENTE CADA DIANA DE MANERA QUE LOS ANGULO ({ZE}, {AL}) CORRESPONDIENTES DE LA FUENTE 33 ESTAN MEMORIZADOS; SE DETERMINA POR CALCULO, A PARTIR DE ESTOS ANGULOS Y DE LAS COORDENADAS DE LAS DIANAS , LA POSICION DEL TRIEDRO (O, X, Y Z). LAS COORDENADAS…
DISPOSITIVO PARA LA DETERMINACION DE LA DISTANCIA Y/O DE LA POSICION.
(01/05/2000) LA INVENCION SE REFIERE A UN DISPOSITIVO PARA DETERMINAR LA DISTANCIA Y/O LA POSICION DE UN OBJETO RESPECTO DE UN PUESTO DE MEDIDA, CON UN EQUIPO DE MEDIDA DE LA DISTANCIA OPTICA , CON UN EQUIPO GRABADOR DE IMAGENES QUE REGISTRA EL OBJETO Y CON UN EQUIPO DE EVALUACION , AL QUE SE LLEVAN LAS SEÑALES DE IMAGEN DEL EQUIPO GRABADOR DE IMAGENES Y QUE, A LA VISTA DEL VALOR DE LA DISTANCIA SUMINISTRADO POR EL EQUIPO DE MEDIDA DE LA DISTANCIA OPTICA Y DE LA POSICION DEL OBJETO EN LA GRABACION DE IMAGENES, DETERMINA LA POSICION ESPACIAL DEL OBJETO. LA INVENCION SE REFIERE ADEMAS A UN PROCEDIMIENTO PARA DETERMINAR UNA POSICION…
(16/04/1999) SISTEMA FOTORRECEPTOR CONSTITUIDO AL MENOS POR TRES FOTOSENSORES NO PARALELOS ENTRE SI, ILUMINADOS POR UN FOTOEMISOR QUE PERMITE, MEDIANTE UN DISPOSITIVO ELECTRONICO ADECUADO, LA DETERMINACION DE LA INTENSIDAD Y DIRECCION DE LA RADIACION INCIDENTE. LA INTEGRACION SOBRE UN SUBSTRATO SEMICONDUCTOR DE FOTORRECEPTORES CONSTITUYENDO MICROPIRAMIDES CUYAS CARAS HOMOLOGAS SEAN PARALELAS Y ESTEN CONECTADAS ELECTRICAMENTE, CONSTITUYE UNA FORMA DE REALIZACION DE UNA SUPERFICIE FOTOSENSORA DE CARACTER VECTORIAL INTEGRADA EN UN MICROSISTEMA CAPAZ DE DETERMINAR LA INTENSIDAD Y DIRECCION DE LLEGADA DE LA RADIACION PROCEDENTE DEL FOTOEMISOR. UNA APLICACION PERMITE EL POSICIONAMIENTO AUTOMATICO DEL PUNTERO DEL MONITOR DE UN ORDENADOR MEDIANTE LA ORIENTACION DE LA CABEZA DEL UTILIZADOR, LO QUE CONSTITUYE…
METODO PARA DETERMINAR LA POSICION EXACTA DE UN VEHICULO MOVIENDOSE EN UN ESPACIO ABIERTO Y APARATO QUE EMPLEA DICHO METODO PARA EL CONTROLA DISTANCIA DEL VEHICULO.
(01/04/1998). Solicitante/s: MILANI, CARLO. Inventor/es: MILANI, CARLO, MORETTO, GIANANTONIO.
UN METODO PARA DETERMINAR LA POSICION DE UN VEHICULO MOVIL PROVISTO CON UN RECEPTOR, A TRAVES DE UNA TRIANGULACION LLEVADA A CABO POR DICHO RECEPTOR EN BASE A LOS DATOS ANGULARES OBTENIDOS PROCESANDO LAS SEÑALES ELECTROMAGNETICAS DIRECTIVAS MODULADAS EMITIDAS POR AL MENOS DOS TRANSMISORES ROTATORIOS (E1,E2); LOS DATOS TRANSMITIDOS POR LOS TRANSMISORES ESTAN CODIFICADOS DE TAL MANERA QUE ES POSIBLE UNA GRAN RESOLUCION EN LA MEDICION ANGULAR EN EL RECEPTOR. UN APARATO EMPLEA DICHO METODO PARA EL CONTROL REMOTO DE UN VEHICULO QUE INCLUYE UNA PLURALIDAD DE UNIDADES PROCESADORAS E INTERCONEXIONES MONTADAS EN EL VEHICULO Y UTILES PARA LLEVAR A CABO LAS FUNCIONES DIRECCIONALES Y DE CONTROL DEL MISMO, ADEMAS DE UN SISTEMA DE COMUNICACION TRANSCEPTOR CONECTADO A DICHO SISTEMA DE CONTROL Y DIRECCION, Y CONSTITUIDO POR DOS PARES DE TRANSCEPTORES UNIDOS A UN MODEM, UNO DE LOS CUALES FORMA PARTE DE UNA ESTACION BASE OPERADA POR UN CONTROLADOR.
PROCESO DE EVALUACION SIMULTANEA DE LAS POSICIONES RELATIVAS DE UNA PLURALIDAD DE BALIZAS.
(01/01/1995). Solicitante/s: MICROMAINE A.S.I. Inventor/es: BROUANT, MARC.
EL DOMINIO DEL INVENTO ES EL DE LOS PROCESOS DE LOCALIZACION Y EXPLORACION DE MAQUINAS U OBJETOS MOVILES MATERIALIZADO EN PARTICULAR POR BALIZAS EMISORAS DE SEÑALES OPTICAS PULSADAS Y CODIFICADAS TEMPORALMENTE. EL OBJETIVO ESENCIAL DEL INVENTO ES SUMINISTRAR UN NUEVO PROCESO DE EVALUACION SIMULTANEO DE LAS POSICIONES DE UNA PLURALIDAD DE BALIZAS POR UN DISPOSITIVO DE OBSERVACION SUMINISTRANDO DATOS ANGULARES QUE CORRESPONDEN A LA POSICION DE UNA BALIZA OBSERVADA. ESTE OBJETIVO ES ALCANZADO ESTABLECIENDO UNA REPARTICION TEMPORAL DE LOS IMPULSOS DE LAS SEÑALES OPTICAS EN EL INTERIOR DE UN PERIODO DE TIEMPO DE OBSERVACION, SINCRONIZANDO LA EMISION DE LAS SEÑALES OPTICAS DE LAS BALIZAS, INICIALIZANDO UNA BASE DE TIEMPO AL NIVEL DEL DISPOSITIVO DE OBSERVACION, MEMORIZANDO LOS DATOS ANGULARES MEDIDOS PARA CADA IMPULSO LUMINOSO DETECTADO E IDENTIFICANDO LAS BALIZAS EMISORAS POR ANALISIS DE LA REPARTICION TEMPORAL DE LOS IMPULSOS DETECTADOS.
(01/05/1993) DETECTOR DE POSICION QUE CONSTA DE DOS ESTACIONES BASE ESPACIADAS A UNA DISTANCIA CONOCIDA SOBRE UNA LINEA DE REFERENCIA L. CADA ESTACION BASE CONSTA DE GENERADORES (2(A), 2(B)) QUE EMITEN UN RAYO LASER GIRATORIO. ESTOS RAYOS LASER GIRATORIOS SON DETECTADOS POR UN SENSOR MOVIL Y UNOS SENSORES DE REFERENCIA (7(A), 7(B)) QUE ESTAN ASOCIADOS CON LOS GENERADORES (2(A), 2(B)) Y SITUADOS EN LA LINEA DE REFERENCIA L. SE DETERMINA LA DIFERENCIA DE TIEMPO ENTRE LA DETECCION DE CADA RAYO LASER POR LOS SENSORES MOVIL Y DE REFERENCIA (7(A), 7(B)) Y SE UTILIZA PARA CALCULAR LOS ANGULOS POSICIONALES Y ENTRE LINEAS DE POSICION ENTRE EL SENSOR MOVIL Y CADA ESTACION BASE Y LA LINEA DE REFERENCIA L. AL EXISTIR SOLO DOS RAYOS LASER…
{kind=link}