CIP-2021 : G01S 13/68 : para el seguimiento en ángulo únicamente.
CIP-2021 › G › G01 › G01S › G01S 13/00 › G01S 13/68[2] › para el seguimiento en ángulo únicamente.
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
G01S 13/68 · · para el seguimiento en ángulo únicamente.
CIP2021: Invenciones publicadas en esta sección.
Seguimiento de un objeto en movimiento para un sistema de autodefensa.
(03/05/2017). Solicitante/s: SAAB AB. Inventor/es: OLSSON, HAKAN, AXELSSON,Leif, Wallenberg,Jan.
Un procedimiento en la propia aeronave para la determinación de la cinemática de un objeto en movimiento que comprende:
- recibir datos angulares (M) para el objeto en varios momentos de observación;
- determinar un primer estado cinemático (X0) del objeto, en función de los datos angulares en un primer momento de observación;
- determinar un estado cinemático previsto del objeto, en función de un modelo cinemático del objeto y al menos un estado cinemático determinado anteriormente (Xt) del objeto, y
- determinar en un momento subsiguiente de observación, un estado cinemático subsiguiente (Xt+ΔT) del objeto en función de dicho estado cinemático previsto del objeto y datos angulares para el objeto, caracterizado porque dicho modelo cinemático comprende una suposición de que el objeto sigue ley de guiado que sigue automáticamente a dicha propia aeronave.
PDF original: ES-2635268_T3.pdf
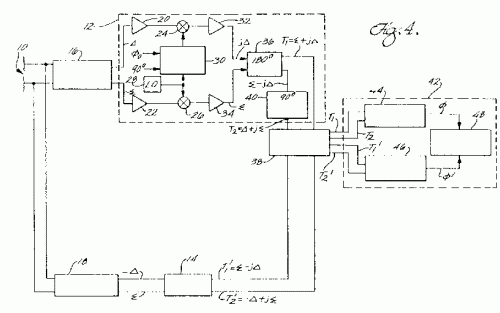
METODO PARA DETECTAR UNA CONDICION DE SALIDA DE HAZ EN UN RECEPTOR DE RADAR MONOIMPULSO, Y RECEPTOR CORRESPONDIENTE.
(16/04/1990). Ver ilustración. Solicitante/s: HUGHES AIRCRAFT COMPANY. Inventor/es: BAGGET, DON W., HERTHER, JAY G., BASSHAM, DEBORAH E.
SE DERIVAN DE LAS SEÑALES SUMA Y DIFERENCIA DE UN RECEPTOR DE RADAR MONOIMPULSO UN PAR DE DIAGRAMAS CARACTERISTICOS QUE DE MANERA RAPIDA Y FIABLE, ESDECIR, AMBIGUAMENTE, INDICA CUANDO UN BLANCO QUE ES RASTREADO O SEGUIDO SE MUEVE FUERA DEL CENTRO DEL HAZ PRINCIPAL DE LA ANTENA. LAS SEÑALES SUMA Y DIFERENCIA SE COMBINAN EN CUADRATURA DE FASE PARA FORMAR UNA PRIMERA SEÑAL DE DIAGRAMA CARACTERISTICO DE VECTOR. LAS SEÑALES SUMA Y DIFERENCIA SE COMBINAN EN CUADRATURA DE FASE PARA FORMAR UNA SEGUNDA SEÑAL DE DIAGRAMA CARACTERISTICO DE VECTOR DE MANERA QUE LA DIFERENCIA DE FASE ENTRE LAS SEÑALES DE DIAGRAMA CARACTERISTICO VARIA CON LA AMPLITUD DE LA SEÑAL DIFERENCIA. LOS DIAGRAMAS CARACTERISTICOS PRIMERO Y SEGUNDO SE COMPARAN PARA DETECTAR LA DIFERENCIA DE FASES ENTRE ELLOS. SE UTILIZAN DIAGRAMAS CARACTERISTICOS CONMUTADOS PARA DETERMINAR LA DIRECCION DE DESPLAZAMIENTO DE BLANCO DESDE LA MIRA DE LA ANTENA Y/O VERIFICAR LA EXACTITUD DE LA INDICACION DE SALIDA DE HAZ.
SISTEMA DE RADAR DE FUNCIONAMIENTO EN DOS BANDAS DE FRECUENCIAS.
(16/10/1987). Solicitante/s: HOLLANDSE SIGNAALAPPARATEN B.V..
SISTEMA DE RADAR PARA EL SEGUIMIENTO AUTOMATICO DE BLANCOS, EN ESPECIAL DE BLANCOS SITUADOS A UNA ALTITUD RELATIVAMENTE BAJA. CONSTA DE UN PRIMER APARATO DE RADAR PARA EL SEGUIMIENTO DE LOS BLANCOS EN LAS COORDENADAS ANGULARES Y EN DISTANCIA; Y DE UN SEGUNDO APARATO DE RADAR PARA EL SEGUIMIENTO DE LOS MENCIONADOS BLANCOS EN, POR LO MENOS, LAS COORDENADAS ANGULARES, FUNCIONANDO AMBOS APARATOS DE RADAR CON UNA FRECUENCIA PROPIA Y CON LA MISMA ANTENA. EL PRIMER APARATO DE RADAR ESTA PROVISTO DE UN CIRCUITO DE PUERTA DE DISTANCIA, DE UNA UNIDAD DE SEGUIMIENTO EN DISTANCIA QUE CONTROLA LA APERTURA DEL CIRCUITO DE LA PUERTA DE DISTANCIA Y DE UNA UNIDAD DE SEGUIMIENTO ANGULAR QUE PROPORCIONA LAS TENSIONES DE ERROR ANGULARES PARA LA ALINEACION DE LA ANTENA. EL SEGUNDO APARATO DE RADAR ESTA PROVISTO DE UNA UNIDAD DE SEGUIMIENTO ANGULAR QUE SUMINISTRA LAS TENSIONES DE ERROR PARA LA ALINEACION DE LA ANTENA.-.
UN SISTEMA DE ENFOQUE PARA PROPAGAR RADIACION ENTRE UN ELEMENTO DE DICHO SISTEMA Y UN VEHICULO QUE SE MUEVE CON RELACION A DICHO ELEMENTO.
(16/01/1976). Solicitante/s: RAYTHEON COMPANY.
Resumen no disponible.
UN SISTEMA PARA LA OBTENCION DE DATOS RELATIVOS A UNA FUENTE DE RADIACION.
(01/10/1975). Solicitante/s: RAYTHEON CO..
Resumen no disponible.
{kind=link}