CIP-2021 : G01S 7/41 : que utilizan el análisis de la señal de eco para la caracterización del blanco;
Firma del blanco; Sección transversal del blanco.
CIP-2021 › G › G01 › G01S › G01S 7/00 › G01S 7/41[2] › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00.
G01S 7/41 · · que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo y procedimiento para detectar ruedas.
(13/11/2013) Procedimiento para detectar ruedas de un vehículo que se desplaza sobre una vía en una dirección demarcha y cuyas ruedas sobresalen de la carrocería de vehículo hacia abajo y están, al menos en parte,expuestas lateralmente a la altura de la carrocería de vehículo , caracterizado por las etapas de:
Emitir un rayo de medición electromagnético concentrado con un desarrollo temporal conocido de sufrecuencia desde un lado de la vía sobre una zona de altura previamente determinada por encima de la vía y de manera oblicua con respecto a la dirección de marcha , estando el rayo de medición concentradode modo que su ángulo de apertura es< 1° o de modo que su zona de incidencia (7') en el vehículo tiene undiámetro máximo de< 5 cm, preferiblemente de< 2 cm,
Recibir el rayo de…
Sensor para determinar una velocidad.
(31/10/2013) Un sensor para detectar si una señal recibida ha sido devuelta bien por un objeto que se mueve a unavelocidad umbral o por encima de la misma o por un objeto que se mueve a una velocidad inferior, comprendiendo elsensor:
a) unos primeros medios de procesamiento que comprenden un filtro de ranura de banda estrecha , estandoconfigurados los medios de procesamiento para recibir una señal de entrada derivada de la señal recibida ygenerar una salida de banda ancha ;
caracterizado porque el sensor comprende:
b) unos segundos medios de procesamiento que comprenden un filtro de ranura de banda ancha , estandoconfigurados los medios…
Detección de pico y reducción de ecos parásitos para un sensor de microondas.
(21/01/2013) Un procedimiento para llevar a cabo una medición de palas para palas rotatorias dentro de una carcasa de un motor de turbina que comprende las etapas de:
transmitir energía de microondas a través de una antena dentro de la carcasa del motor de turbina;
recopilar datos en fase y en cuadratura asociados con la energía de microondas reflejada por las palas y lacarcasa;
llevar a cabo una Transformada Rápida de Fourier (FFT) compleja en los datos en fase y en cuadratura paragenerar componentes de frecuencia positiva y componentes de frecuencia negativa;
separar los componentes de frecuencia positiva de los componentes de frecuencia negativa;
llevar a cabo una FFT inversa en cada uno de los componentes de frecuencia positiva y los componentes defrecuencia negativa para generar datos del dominio de tiempo complejos asociados con componentes…
Rechazo de ecos parásitos en un receptor radar pasivo de señales OFDM.
(30/05/2012) Receptor radar que trata una señal radioeléctrica recibida a través de un canal de propagación (EM-RE) y compuestapor tramas de símbolos emitidas cada una en portadoras ortogonales codificadas (f1 - fK), que comprende unmedio de recepción para poner la señal recibida en forma de una señal digital de símbolos y un medio decorrelación Doppler-distancia para discriminar blancos móviles, caracterizado porque comprende un medio para estimar parámetros de la señal digital emitida (X, S1 - SI) en dos símbolos (S1, S2) de la trama, un medio que utiliza los citados parámetros para producir rayas espectrales (SP1 - SPK) de la señal digital de símbolos (X)correspondiente a las portadoras ortogonales (f1 - fK), y un medio de filtrado frecuencial que utiliza los citadosparámetros para eliminar…
PROCEDIMIENTO DE GESTIÓN DE FORMA DE ONDA QUE UTILIZA UNA CARTOGRAFÍA DOPPLER POR SEGMENTACIÓN ESTADÍSTICA.
(03/03/2011) Procedimiento de gestión de las formas de ondas emitidas por un sistema de detección electromagnética, caracterizado porque comprende al menos: - una etapa de tratamiento de la señal que permite la detección y el rastreo de objetivos de interés, - una etapa de cartografía Doppler de las zonas de rastreo presentes en el espacio cubierto por el sistema de detección 10 aplicando la etapa de cartografía Doppler un procedimiento de segmentación estadística de las muestras de la señal recibida, permitiendo el procedimiento recortar el espacio en zonas que tienen un espectro Doppler homogéneo. proporcionando las dos etapas a una etapa de gestión adaptativa de formas de ondas las informaciones…
PROCEDIMIENTO Y DISPOSITIVO PARA LA DETERMINACION DE LA CLASE DE VEHICULO.
(19/04/2010) Procedimiento para la clasificación de vehículos (A) mediante su longitud de vehículo (L), en el que se dirige sobre la calzada una radiación de radar en forma de un cono de radar con un ángulo de apertura horizontal (a) bajo un ángulo de colocación agudo (ß) y a una distancia (a) respecto a una calzada, y mediante la evaluación de las señales de radar provocadas por la reflexión en un vehículo (A) que circula por la calzada, se determina un trayecto recorri- do (s), a lo largo del cual el vehículo (A) que está circulando refleja la radiación del radar, determinándose a partir de las señales del radar, por lo menos un valor de distancia (E) mediante el cual se puede deducir…
DISPOSITIVO Y PROCEDIMIENTO PARA RECONOCER EL TRAZADO DEL CONTORNO DE UN OBSTACULO.
(15/02/2010) Dispositivo para un vehículo destinado a reconocer el trazado del contorno de un obstáculo en los alrededores del vehículo cuando este vehículo con el dispositivo pasa por delante del obstáculo , que comprende: al menos un equipo de emisión configurado como un sensor de ultrasonidos para emitir una señal de emisión hacia el obstáculo ; al menos un equipo de recepción para recibir al menos una señal de reflexión n, donde n = 1-N, por cada señal de emisión emitida, representando la señal de reflexión a la señal de emisión después de su reflexión en el obstáculo ; y un equipo de evaluación para evaluar la señal de reflexión con respecto al trazado del contorno del obstáculo ; estando el equipo de evaluación concebido para determinar la longitud (L) de un hueco de aparcamiento que está…
PROCEDIMIENTO DE CLASIFICACION DE OBJETIVOS.
(16/11/2003). Solicitante/s: DAIMLERCHRYSLER AEROSPACE AKTIENGESELLSCHAFT. Inventor/es: SCHMID, JOHANNES.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA CLASIFICACION DE OBJETIVOS POR MEDIO DE UN SISTEMA RADAR. EL PROCEDIMIENTO DE ACUERDO CON LA INVENCION HA PREVISTO ESPECIALMENTE QUE EL ESPECTRO DE POTENCIA Y EL NUMERO DE PALETAS DE LA TOBERA EN EL MOTOR A REACCION DEL AVION DEBA SER DETERMINADO A FIN DE CLASIFICAR AVIONES A REACCION UTILIZANDO METODOS TRADICIONALES. SOBRE ESTA BASE, ESTABLECE UN VECTOR CARACTERISTICO QUE ES POSTERIORMENTE PROCESADO MEDIANTE UNA RED NEURONAL.
METODO DE INTERPRETACION DE DATOS DE MEDICION, MEDIDOS POR UN APARATO CAPTADOR EN ESTEREO, UTILIZANDO LA REFLEXION DE ONDAS.
(01/04/2001) LA INVENCION DESCRIBE UN PROCEDIMIENTO CON EL QUE PUEDEN ESTABLECERSE POR EJEMPLO DE FORMA PROPIA UNIDADES MOVILES DURANTE SU DESPLAZAMIENTO A TRAVES DE UN PERIMETRO DESCONOCIDO DE UNA TARJETA PERIMETRICA EXACTA. EL PROCEDIMIENTO DE ACUERDO CON LA INVENCION PRESUPONE, QUE LA DISPOSICION DE SENSORES ESTEREO TRABAJA CON SENSORES MULTIPLES Y A TRAVES DE UNA UNIDAD DE VALORACION VALORA LA DIFERENCIA DE TIEMPO DE DESARROLLO EN LAS SEÑALES RECIBIDAS EN SENSORES INDIVIDUALES Y PARA EL ABARCADO CONJUNTO DE GRUPOS DE VALOR DE MEDIDA CON REFERENCIA A UN OBJETO EN EL ENTORNO. CON EL PROCEDIMIENTO DE ACUERDO CON LA INVENCION SE ELABORAN DE FORMA INTELIGENTE RESULTADOS DE MEDICION Y VALORES DE MEDIDA TALES, QUE POR EJEMPLO SE ELIMINAN LOS BORDES DE…
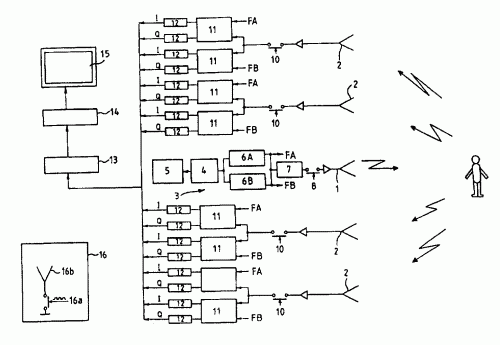
PROCEDIMIENTO Y DISPOSITIVO PARA LA DETECCION Y LOCALIZACION DE UN INDIVIDUO, POR EJEMPLO ENTERRADO BAJO UN DEPOSITO DE ALUD.
(16/02/2000). Ver ilustración. Solicitante/s: OFFICE NATIONAL D'ETUDES ET DE RECHERCHES AEROSPATIALES(O.N.E.R.A.). Inventor/es: LEMAITRE, FRANCOIS, POUSSIERE, JEAN-CLAUDE.
LA INVENCION SE REFIERE A UN METODO ELECTROMAGNETICO DE DETECCION Y LOCALIZACION DE UN INDIVIDUO QUE NO PUEDE COOPERAR. SEGUN LA INVENCION, SE EMITE UNA SEÑAL ELECTROMAGNETICA EN LAS PROXIMIDADES DE UNA ZONA DE BUSQUEDA (N) Y SE DETECTA EN LAS PROXIMIDADES DE DICHA ZONA (N) UNA SEÑAL REFLEJADA DESDE ELLA QUE SE CARACTERIZA PORQUE LA EMISION Y LA RECEPCION SE EFECTUAN POR MEDIO DE AL MENOS DOS ANTENAS DISTINTAS; PORQUE SE FILTRAN LA SEÑAL O LAS SEÑALES ASI OBTENIDAS CON UN FILTRO DE PASO BAJO O DE PASO DE BANDA CON EL FIN DE EXTRAER LOS COMPONENTES QUE CORRESPONDEN AL MOVIMIENTO HUMANO; Y PORQUE SE TRATAN LA SEÑAL O LAS SEÑALES FILTRADAS ASI OBTENIDAS PARA CONFIRMAR LA PRESENCIA DE UN INDIVIDUO O PARA LOCALIZARLO. EL SISTEMA PERMITE PONER EN PRACTICA ESTE METODO. APLICACION A LA LOCALIZACION DE VICTIMAS DE ALUDES.
PROCEDIMIENTO PARA LA DETERMINACION DE LA POSICION DE UN BLANCO DE RADAR.
(01/02/1999). Solicitante/s: DAIMLER-BENZ AEROSPACE AKTIENGESELLSCHAFT. Inventor/es: BODENMULLER, EDELTRAUD, VOGEL, SIEGFRIED.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA LA DETERMINACION Y/O EL DESPLAZAMIENTO EN EL TIEMPO (TRAZA) DE UNA SUPERFICIE OBJETIVO (RADAR) POR MEDIO DE UNA INSTALACION DE RADAR. UN NUMERO M PREDETERMINABLE DE LAS AMPLITUDES DE ECO MAS GRANDES ES DETERMINADO PRIMERAMENTE PARA LA SUPERFICIE OBJETIVO, ASI COMO LAS CELDAS DE RESOLUCION CORRESPONDIENTES (COORDENADAS DE DISTANCIA Y AZIMUT). MEDIANTE LA FORMACION DEL VALOR MEDIO DE LAS COORDINAS DE DISTANCIA Y AZIMUT DE LAS CELDAS DE RESOLUCION SELECCIONADAS, SON DETERMINADAS COORDENADAS PARA UN PUNTO DE REFERENCIA QUE ES ESTABLE EN EL ESPACIO EN RELACION A LA SUPERFICIE OBJETIVO. ESTE PUNTO DE REFERENCIA ES UTILIZADO PARA LA LOCALIZACION Y/O SEGUIMIENTO DE TRAZA DE LOS OBJETOS, EN PARTICULAR BARCOS.
{kind=link}