Conjunto y procedimiento de accionamiento para jeringas.
Un conjunto de accionamiento de una jeringa (5) que comprende un cilindro (12) provisto de un resalte exterior (13) y un pistón (15) acoplado de forma deslizable dentro del cilindro (12);
comprendiendo el conjunto de accionamiento dos dispositivos de agarre (50, 51) del cilindro (12) y del pistón (15), respectivamente, que pueden moverse uno respecto al otro en una dirección (53) paralela a un eje longitudinal (11) de la jeringa (5), comprendiendo el dispositivo de agarre (50) del cilindro (12) al menos una primera mordaza (52) adaptada para recibir y sostener el cilindro (12) y al menos una segunda mordaza (56) que puede moverse entre una posición de sujeción y una posición de liberación del cilindro (12); y se caracteriza por el hecho de que el dispositivo de agarre (51) del pistón (15) comprende una tercera mordaza (58) que puede moverse entre una posición de sujeción y una posición de liberación de un cabezal extremo (16) del pistón (15) y en el que la tercera mordaza (58) puede moverse además desde y hacia la primera mordaza (52) en la dirección (53) para suministrar axialmente la jeringa (5) a través de la primera mordaza (52) de modo que mueve el resalte (13) para contactar con la primera mordaza (52) y el pistón (15) a una posición de tope dentro del cilindro (12).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12161130.
Solicitante: Aesynt Topco B.V.
Inventor/es: BIANCO,WALTER, GIRIBONA,PAOLO, MINISINI,MICHELE, DE VIEDMA SANTORO,GARCIA GASPAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › Embalaje de materiales plásticos, semilíquidos, líquidos o líquidos y sólidos mezclados, en receptáculos o recipientes individuales, p. ej. en sacos, bolsas, cajas, cartones, latas o tarros.
- B65B43/46 B65B […] › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › sirviéndose de zarpas.
PDF original: ES-2535277_T3.pdf
Fragmento de la descripción:
Conjunto y procedimiento de accionamiento para jeringas
La presente invención se refiere a un conjunto para el accionamiento de jeringas.
Es conocida en el campo de la preparación de productos farmacéuticos una máquina, que comprende un almacén para guardar jeringas, cada una de las cuales presenta un cilindro y un pistón que se acopla de forma deslizante en el propio cilindro; un almacén para guardar botellas; un almacén para guardar bolsas de Infusiones; una estación doslficadora para la preparación de un producto farmacéutico obtenido al mezclar conjuntamente al menos una sustancia farmacéutica contenida en una botella y al menos un dlluyente contenido en una bolsa de Infusión; y un brazo robotlzado para el transporte y agarre para transferir jeringas y botellas entre la estación doslficadora y los correspondientes almacenes.
La estación doslficadora generalmente está provista de un conjunto de accionamiento que comprende dos dispositivos de agarre para el cilindro y el pistón de la jeringa, respectivamente, y un dispositivo de accionamiento para desplazar los dos dispositivos de agarre uno respecto al otro en una dirección paralela a un eje longitudinal de la propia jeringa.
Ya que inicialmente la jeringa se carga en el correspondiente almacén por un operario una vez se ha extraído desde una carcasa protectora, y de este modo se transfiere al conjunto de accionamiento por medio del brazo robotlzado, los conjuntos de accionamiento conocidos del tipo anteriormente descrito presentan varios Inconvenientes, que derivan principalmente del hecho que los conjuntos de accionamiento no son capaces de garantizar la posición inicial correcta del cilindro en el correspondiente dispositivo de agarre y la posición Inicial correcta del pistón a lo largo del propio cilindro, y pueden comprometer el funcionamiento correcto de dosificar los productos farmacéuticos en las jeringas y/o bolsas de Infusión.
El documento WO2009/147252 describe una estación de trabajo automatizada para la preparación de un producto final para un uso médico o farmacéutico a partir de distintas sustancias. El producto final se guarda en un contenedor mientras que cada sustancia está contenida en un recipiente.
La estación de trabajo comprende una cámara aislada que delimita diferentes áreas internas de funcionamiento.
La cámara aislada delimita un área de carga que comprende medios de descontaminación rápida, un dispositivo de bloqueo para Introducir recipientes y contenedores en el área de carga y para descargar los productos finales de la estación de trabajo, un área de almacenamiento para guardar los recipientes y contenedores llenos que se comunica con el área de carga, un área de transferencia, un área de preparación para preparar los productos finales que se comunica con el área de almacenamiento a través del área de transferencia, y un robot para manipular los objetos contenidos en el área de almacenamiento y/o en el área de preparación.
Es un objeto de la presente invención proporcionar un conjunto para el accionamiento de una jeringa que está exento de los inconvenientes anteriormente mencionados y que es simple y tiene un coste eficiente para su aplicación.
De acuerdo con la presente invención, se proporciona un conjunto para el accionamiento de una jeringa tal como se reivindica en las reivindicaciones 1 a 5.
La presente invención además se refiere a un método para accionar una jeringa.
De acuerdo con la presente invención, se proporciona un método para accionar una jeringa según se reivindica en las reivindicaciones 6 y 7.
La presente invención se describirá ahora con referencia a los dibujos que se acompañan, que muestran un ejemplo no limitativo, en los que:
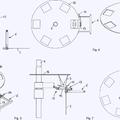
La figura 1 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de una realización preferida de la máquina de acuerdo con la presente invención;
La figura 2 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un primer detalle de la máquina de la figura 1;
La figura 3 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un detalle de la figura 2;
La figura 4 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un segundo detalle de la máquina de la figura 1;
La figura 5 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un tercer detalle de la máquina de la figura 1;
La figura 6 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un detalle de la figura 5;
La figura 7a es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un cuarto detalle de la máquina de la figura 1;
La figura 7b es una vista en perspectiva de un detalle de la figura 7a;
La figura 8 es una vista en perspectiva esquematizada, con partes aumentadas y partes eliminadas por motivos de claridad, de un quinto detalle de la máquina de la figura 1;
La figura 9 es una vista frontal esquemática, con partes eliminadas por motivos de claridad, del detalle de la figura 8;
La figura 10 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un sexto detalle de la máquina de la figura 1;
La figura 11 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un séptimo detalle de la máquina de la figura 1;
La figura 12 muestra esquemática el principio de funcionamiento del detalle de la figura 11;
La figura 13 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un octavo detalle del sistema de la figura 1 mostrado en dos posiciones de funcionamiento distintas;
La figura 14 muestra esquemáticamente el principio de funcionamiento del detalle mostrado en la figura 13;
y
La figura 15 es una vista esquemática en perspectiva, con partes eliminadas por motivos de claridad, de un noveno detalle de la máquina de la figura 1.
Con referencia a la figura 1, el número 1 indica a modo de conjunto una máquina para la preparación de productos farmacéuticos, que comprende una carcasa en forma de caja 2 que tiene una forma sensiblemente paralelepipédica y que define una cámara Interior 3, que se mantiene bajo condiciones sensiblemente estériles por un dispositivo neumático de tipo conocido, con una forma tal que suministra un caudal de aire estéril a través de la cámara 3 y evita la entrada de aire del medio exterior hacia la cámara 3.
La cámara 3 acomoda un almacén 4 para almacenar jeringas 5; un almacén 6 para guardar botellas 7; un almacén anular 8 para guardar bolsas de infusión 9; y un dispositivo robotizado 10 para agarrar y transportar jeringas 5 y/o botellas 7.
Cada jeringa 5 (figura 3) presenta un eje longitudinal 11, y comprende un cilindro 12 provisto de un saliente 13 ortogonal al eje 11, una aguja (no mostrada) acoplada al cilindro 12, un tapón de cierre 14 montado para proteger la aguja (no mostrada) de posibles contaminaciones, y un pistón 15, que está acoplado de forma deslizante en el cilindro 12, y está provisto de un cabezal final 16 perpendicular al eje 11.
Cada bolsa 9 está provista de un adaptador 17 de tipo conocido, que comprende dos mordazas conformadas 18 que pueden moverse entre una posición de sujeción y una posición de liberación de un borde superior de la bolsa 9, y presenta una pasador de empuje 19 que sobresale hacia arriba desde una de las mordazas 18 (figura 5).
Tal como se muestra en las figuras 1, 3 y 4, el dispositivo 10 está montado dentro del almacén 8, comprende una pluralidad de brazos articulados 20 unidos entre sí, y está provisto de una mordaza de agarre 21, que está montada en el extremo libre de los brazos 20, y está definida por dos mordazas 22 que pueden moverse entre una posición de sujeción y una posición de liberación de una jeringa 5 o una botella 7.
Con referencia a la figura 2, cada almacén 4, 6 comprende dos transportadores de cinta recíprocamente paralelos 23, cada uno de los cuales se extiende en una dirección sensiblemente vertical A, orientados de cada al otro transportador 23, y forma un bucle alrededor de un par de poleas (no mostradas), que son coaxiales con las poleas (no mostradas) del otro transportador 23,y están montadas de modo que giran de forma intermitente alrededor del respectivo eje horizontal 24 paralelo al otro y transversal a la dirección A.
Cada almacén 4, 6 comprende además una pluralidad de cunas de transporte 25, que se extienden entre los transportadores 23, están acopladas a los transportadores 23 para... [Seguir leyendo]
Reivindicaciones:
1. Un conjunto de accionamiento de una jeringa (5) que comprende un cilindro (12) provisto de un resalte exterior (13) y un pistón (15) acoplado de forma deslizable dentro del cilindro (12); comprendiendo el conjunto de accionamiento dos dispositivos de agarre (50, 51) del cilindro (12) y del pistón (15), respectivamente, que pueden moverse uno respecto al otro en una dirección (53) paralela a un eje longitudinal (11) de la jeringa (5), comprendiendo el dispositivo de agarre (50) del cilindro (12) al menos una primera mordaza (52) adaptada para recibir y sostener el cilindro (12) y al menos una segunda mordaza (56) que puede moverse entre una posición de sujeción y una posición de liberación del cilindro (12); y se caracteriza por el hecho de que el dispositivo de agarre (51) del pistón (15) comprende una tercera mordaza (58) que puede moverse entre una posición de sujeción y una posición de liberación de un cabezal extremo (16) del pistón (15) y en el que la tercera mordaza (58) puede moverse además desde y hacia la primera mordaza (52) en la dirección (53) para suministrar axialmente la jeringa (5) a través de la primera mordaza (52) de modo que mueve el resalte (13) para contactar con la primera mordaza (52) y el pistón (15) a una posición de tope dentro del cilindro (12).
2. Un conjunto de accionamiento según la reivindicación 1, en el que el dispositivo de agarre (50) del cilindro (12) comprende además unos medios de empuje elásticos (55) adaptados para mantener normalmente la primera mordaza (52) en una posición de sujeción del cilindro (12).
3. Un conjunto de accionamiento según la reivindicación 1 o 2, en el que la segunda mordaza (56) comprende dos pinzas (57) conformadas para penetrarse mutuamente tras moverse la segunda mordaza (56) a su posición de
sujeción.
4. Un conjunto de accionamiento según cualquiera de las reivindicaciones anteriores, en el que el dispositivo de agarre (50) del cilindro (12) comprende dos de dichas primeras mordazas (52); estando la segunda mordaza (56) montada entre las dos primeras mordazas (52) en dicha dirección (53).
5. Un conjunto de accionamiento según cualquiera de las reivindicaciones anteriores, en el que dicha tercera mordaza (58) presenta al menos dos juntas (59) adaptadas para recibir y mantener los cabezales de los extremos (16) de las jeringas (5) de distintos tamaños.
6. Un método para actuar sobre una jeringa (5) para la preparación de un producto farmacéutico, comprendiendo la jeringa (5) un cilindro (12) provisto de un resalte exterior (13) y un pistón (15) que se acopla de forma deslizante en el propio cilindro (12); comprendiendo el método la etapa de:
Colocar la jeringa (5) en al menos una primera mordaza (52) adaptada para recibir y sostener dicho cilindro (12);
Y que se caracteriza por el hecho de que comprende además en una secuencia y en este orden las etapas de:
desplazar un dispositivo de empuje (51) en contacto con un cabezal del extremo (16) del pistón (15), comprendiendo el dispositivo de empuje (51) una tercera mordaza (58) que puede moverse entre una posición de sujeción y una posición de liberación de dicho cabezal del extremo (16);
alimentar el dispositivo de empuje (51) en una dirección (53) paralela a un eje longitudinal (11) de la jeringa (5) de modo que mueve la jeringa (5) axialmente a través de la primera mordaza (52) y permite que el resalte (13) se disponga en contacto con la primera mordaza (52) y el pistón (15) se disponga en una posición de tope dentro del cilindro (12);
sujetar la jeringa (5) en al menos una segunda mordaza (56) que puede moverse entre una posición de sujeción y una posición de liberación del cilindro (12);
sujetar el cabezal del extremo (16) dentro de la tercera mordaza (58) una vez que se ha desplazado el resalte (13) para contactar con la primera mordaza (52) y el pistón 815) se ha desplazado a dicha posición de paro; y desplazar la tercera mordaza (58) en dicha dirección (53) para accionar la jeringa (5).
7. Un método según la reivindicación 6 y que comprende además la etapa de:
mantener normalmente la primera mordaza (52) en una posición de sujeción del cilindro (12) por medio de los medios de empuje elásticos (55).
Patentes similares o relacionadas:
Envasado de chips comestibles de aperitivo, del 15 de Julio de 2020, de Frito-Lay Trading Company GmbH (100.0%): Un procedimiento para envasar chips comestibles de aperitivo , comprendiendo dicho procedimiento las siguientes etapas: a) proporcionar […]
Procedimiento para el llenado de gas de un compartimento de un recipiente flexible, del 22 de Abril de 2020, de ECOLEAN AB: Procedimiento de manipulación de recipientes de tipo plegable en una máquina de llenado que comprende estaciones dispuestas consecutivamente (S1, S2, […]
Máquina de llenado para bolsas con aberturas, del 19 de Febrero de 2020, de Ing. A. Rossi Impianti Industriali - Societa' a Responsabilita' Limitata: Una máquina de llenado para bolsas (S) con una abertura (B), que comprende: - un cabezal dispensador con un producto que ha […]
Planta y procedimiento de preparación de medicamentos, del 9 de Octubre de 2019, de AEA S.R.L: Planta para preparar medicamentos, que comprende: una carcasa que define al menos una cámara de almacenamiento y al menos una […]
Máquina de llenado para el llenado de un paquete de tipo bolsa flexible, del 18 de Septiembre de 2019, de ECOLEAN AB: Una máquina de llenado para llenar paquetes de tipo bolsa flexible, teniendo cada uno un canal de llenado y siendo esencialmente plano en un estado no llenado […]
 Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Dispositivo de suministro de bolsas, del 10 de Julio de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de suministro de bolsas , usado en una máquina rotatoria de embalaje de llenado de bolsas equipada con una pluralidad de parejas de agarradores intermitentemente […]
Máquina envasadora con funcionalidad aumentada, particularmente para pequeñas bolsas preformadas, del 12 de Junio de 2019, de Umbra Packaging S.R.L: Una máquina envasadora con funcionalidad aumentada, particularmente para pequeñas bolsas preformadas, que comprende una pluralidad de estaciones de procesado […]