Péndulo plegado de baja frecuencia con alto factor de calidad mecánica y sensor sísmico que utiliza un péndulo plegado de este tipo.
Péndulo plegado que comprende:
- un soporte (F);
- una masa de ensayo (PM);
- un péndulo simple (SP);
- un péndulo invertido (IP);
estando conectados el péndulo simple y el péndulo invertido en uno de sus extremos a la masa de ensayo (PM) y en el otro extremo al soporte (F) por medio de 4 sistemas de juntas correspondientes (G), no estando conectada la masa de ensayo al soporte (F) y, por tanto, siendo libre de oscilar, comprendiendo cada sistema de junta (G) relevante para el péndulo simple (PS) una o más juntas a tensión,
cada uno de los sistemas de junta (G) relevantes para el péndulo invertido (IP) comprende una o más juntas a compresión,
caracterizado por que dichas una o más juntas son juntas elípticas no circulares.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2010/000293.
Solicitante: UNIVERSITA' DEGLI STUDI DI SALERNO.
Nacionalidad solicitante: Italia.
Dirección: Via Ponte Don Melillo 1 84084 Fisciano (SA) ITALIA.
Inventor/es: GIORDANO,GERARDO, BARONE,FABRIZIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01H1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01H MEDIDA DE VIBRACIONES MECANICAS O DE ONDAS ULTRASONORAS, SONORAS O INFRASONORAS. › Medida de vibraciones en sólidos utilizando la conducción directa al detector (G01H 9/00, G01H 11/00 tienen prioridad).
- G01P15/02 G01 […] › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 15/00 Medida de la aceleración; Medida de la deceleración; Medida de los choques, es decir, de una variación brusca de la aceleración. › haciendo uso de las fuerzas de inercia (G01P 15/14, tienen prioridad).
- G01V1/18 G01 […] › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 1/00 Sismología; Prospección o detección sísmica o acústica. › Elementos receptores, p. ej. sismógrafos, geófonos.
PDF original: ES-2464126_T3.pdf
Fragmento de la descripción:
Péndulo plegado de baja frecuencia con alto factor de calidad mecánica y sensor sísmico que utiliza un péndulo plegado de este tipo La invención concierne a un péndulo plegado de baja frecuencia con un alto factor de calidad mecánica y a un sensor sísmico que utiliza un péndulo plegado de este tipo.
Más precisamente, la invención concierne a un péndulo plegado, en particular un péndulo monobloque, que, gracias a su conformación particular, es capaz de garantizar un altísimo factor de calidad mecánica. La invención concierne también a un sensor sísmico que utiliza un péndulo de este tipo al medir el desplazamiento mutuo de la masa de ensayo del péndulo y el soporte del mismo.
El principio en el cual se basan la mayoría de los sistemas mecánicos, que están actualmente en uso para la medición del desplazamiento horizontal absoluto, es el de la medición del desplazamiento relativo con respecto a una masa idealmente inercial y por medio de técnicas de lectura de diferente naturaleza (por ejemplo, óptica o electromagnética) .
En la hipótesis de que se tuviera a disposición una masa realmente inercial, tal método conduciría a mediciones limitadas tanto por el ruido térmico de la masa como el ruido del sensor de lectura y los ruidos del ambiente que estén presentes. De hecho, el límite real de tales sistemas está constituido exactamente por la calidad de realización de la masa inercial de referencia.
En el caso de mediciones de desplazamiento horizontal, tales sistemas hacen uso generalmente de un sistema oscilante, por ejemplo un péndulo, cuya masa oscilante es en realidad la masa inercial. La realización de una medición de buena sensibilidad a baja frecuencia implica, por tanto, que el sistema oscilante mecánico tenga frecuencia de resonancia muy baja junto con un buen factor de calidad mecánica. Esto último ciertamente es necesario a fin de que el movimiento aparente de la masa inercial no se vea influenciado por el movimiento de la parte fija del sistema mecánico que soporta tal masa.
Por ejemplo, en el caso de la medición de ondas sísmicas, teóricamente un factor de calidad mecánica infinitivamente grande indicaría la ausencia de fuerzas viscosas adecuadas para interrumpir el movimiento de la masa oscilante, permitiendo así una medición perfecta del desplazamiento relativo entre la masa inercial y la tierra.
Sin embargo, los sistemas mecánicos con frecuencia de resonancia muy baja tienen en general dimensiones muy grandes y serían muy complejos de materializar.
Sin embargo, existe una configuración particular de principio, el péndulo de Watt (péndulo plegado) , que es muy bien conocido en la literatura, una combinación del péndulo clásico y el péndulo invertido, que permite, en cambio, alcanzar frecuencias muy bajas manteniendo al mismo tiempo dimensiones relativamente reducidas con respecto a los sistemas tradicionales, permitiendo además que se lleve a cabo la sintonización de la frecuencia de resonancia del sistema mecánico [1].
Una configuración de este tipo se ha utilizado muchas veces para tal tipo de medición, con realizaciones que son incluso muy compactas. El problema de todas las realizaciones de este tipo, que se describen ampliamente en la literatura, viene dado por el hecho de que no es posible reducir la frecuencia por debajo de aproximadamente 100 mHz, tanto al vacío como en el aire, debido a las disimetrías del sistema conectadas con la manera en la que se ha materializado hasta ahora el péndulo de Watt y con el bajo factor de calidad mecánica que se puede obtener experimentalmente.
A modo de ejemplo, imaginando un sensor mecánico horizontal que se materializa con un péndulo simple cuya frecuencia de resonancia es de 0, 5 Hz, se tiene que la frecuencia de resonancia de tal sistema es 1 g
fr ∀ 2! l
De donde se ve que las dimensiones del brazo oscilante de un péndulo de este tipo son de alrededor de 1 m; por tanto, si se quieren tener frecuencias más bajas, tienen que extenderse las dimensiones del brazo oscilante, alcanzando dimensiones de alrededor de 100 metros para una frecuencia de 0, 05 Hz.
La solución del péndulo plegado [1] es tal que proporciona una frecuencia de resonancia teóricamente igual a 0 con cualesquiera dimensiones pequeñas; sin embargo, en la realización práctica hay factores mecánicos que ponen un límite inferior a la frecuencia de resonancia, limitándola de hecho a aproximadamente 70 mHz con una realización mecánica cuyas dimensiones son iguales a 140 x 134 x 40 mm3, tal como se conoce ampliamente en la literatura con respecto a sensores de dimensiones pequeñas [2, 3, 4, 5, 6, 7, 8]; además, en condiciones de presión ambiente,
a la frecuencia de resonancia mínima de 70 mHz, el factor de calidad mecánica resulta tener un valor igual a alrededor de Q = 10, llegando a alrededor de Q = 140 para un valor de la frecuencia igual a 700 mHz.
Dadas sus características, un sensor de este tipo puede utilizarse en todas las aplicaciones en las que se necesitan mediciones del movimiento del suelo a baja frecuencia, tales como, por ejemplo, la fabricación de sismómetros o acelerómetros para el análisis del riesgo sísmico, aviso sísmico temprano, etc., el ajuste del mismo como sensor adicional para la cobertura de la banda de baja frecuencia, la habilitación de una herramienta adicional para la investigación y la extensión, en realidad, del rango de frecuencia; dadas sus dimensiones particularmente compactas, un sensor de este tipo disfruta de una transportabilidad e instalación más fáciles, permitiendo una mejor integración en campo con respecto a los sensores tradicionales. Además, su peso muy limitado, inferior a un kilogramo, permite su uso como sensor para la estabilización de estructuras oscilantes, incluso estructuras particularmente complejas, tales como, por ejemplo, los péndulos invertidos utilizados para la estabilización de los espejos que constituyen los interferómetros para la detección de las ondas gravitacionales.
El esquema básico de un péndulo plegado se construye por medio del uso de un péndulo simple y el péndulo invertido, y una barra que conecta los extremos oscilantes de tales péndulos [1].
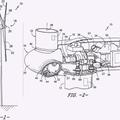
En la figura 1 se muestra el esquema general del péndulo plegado y en la figura 2 se muestra el esquema de realización presente actualmente en la literatura (se hace referencia a [2, 3, 4, 5, 6, 7, 8] para un estudio en profundidad) .
La referencia F se refiere al soporte o “bastidor”, la referencia PM a la masa de ensayo, la referencia IP al péndulo invertido y la referencia SP al péndulo simple; en cambio, G se refiere a una junta genérica. A la masa de ensayo PM se puede añadir también una masa adicional CM, que no se produce partiendo del mismo bloque monolítico, denominado masa de calibración, para que se utilice en la calibración del sistema en frecuencia (variación de la frecuencia de resonancia natural) [2, 3, 4, 5, 6, 7, 8].
Estas referencias se utilizan igualmente en las figuras 3 y 4.
El sistema así compuesto necesita cuatro juntas flexibles. Cada junta tiene que materializarse en pareja (para un número total de ocho juntas) , con el fin de limitar los efectos torsionales de las mismas juntas y, por tanto, minimizar el acoplamiento entre los grados de libertad longitudinal y transversal; en las figuras 1 y 2 se proporcionan vistas laterales en las que es posible ver las disposiciones de 4 juntas (una para cada pareja) . Tales juntas conectan, respectivamente:
- un extremo del péndulo simple y la estructura que lo soporta;
- el extremo oscilante del péndulo simple y un extremo de la barra que conecta los péndulos;
- el otro extremo de la barra de conexión y el extremo oscilante del péndulo invertido;
- el extremo del péndulo invertido y la estructura que soporta el péndulo plegado.
Con el fin de reducir el ruido térmico, en particular a baja frecuencia [9], la realización de un sensor de este tipo es del tipo monolítico. Por tanto, las juntas están constituidas por el mismo material del que están constituidas las otras partes, y el conjunto (juntas y partes oscilantes) se hace mediante un trabajo de corte por electroerosión de un único bloque de material.
Puesto que se tiene que garantizar la rotación de los brazos de los péndulos, tales juntas deben ser necesariamente flexibles: por esta razón, tienen un espesor muy pequeño e introducen pequeñas fuerzas de recuperación del tipo elástico, debido a la deformación de la misma junta provocada por oscilaciones [10, 11].
Por tanto, dado que la frecuencia de resonancia disminuye por la reducción de la fuerza de recuperación de las juntas, que depende... [Seguir leyendo]
Reivindicaciones:
1. Péndulo plegado que comprende:
- un soporte (F) ;
- una masa de ensayo (PM) ;
- un péndulo simple (SP) ;
- un péndulo invertido (IP) ;
estando conectados el péndulo simple y el péndulo invertido en uno de sus extremos a la masa de ensayo (PM) y en el otro extremo al soporte (F) por medio de 4 sistemas de juntas correspondientes (G) , no estando conectada la masa de ensayo al soporte (F) y, por tanto, siendo libre de oscilar, comprendiendo cada sistema de junta (G) relevante para el péndulo simple (PS) una o más juntas a tensión,
cada uno de los sistemas de junta (G) relevantes para el péndulo invertido (IP) comprende una o más juntas a compresión,
caracterizado por que dichas una o más juntas son juntas elípticas no circulares.
2. Péndulo plegado según la reivindicación 1, caracterizado por que está formado por un bloque monolítico de un material mecanizado adecuado.
3. Péndulo plegado según la reivindicación 2, caracterizado por que el bloque monolítico se ha mecanizado por corte mediante electroerosión.
4. Péndulo plegado según cualquiera de las reivindicaciones 1 a 3, caracterizado por que cada uno de dichos sistemas de junta (G) comprende dos juntas.
5. Péndulo plegado según la reivindicación 4, caracterizado por que dichos sistemas de junta (G) comprenden dos juntas trazadas por la retirada de dos elipses con una excentricidad ε > 3, 2 y que tienen una distancia mutua d > 10 micrones.
6. Péndulo plegado según cualquiera de las reivindicaciones 1 a 5, caracterizado por que la masa de ensayo (PM) tiene una forma que es sustancialmente paralelepipédica con una abertura central realizada a fin de reducir su masa.
7. Péndulo plegado según cualquier reivindicación 2 a 6, caracterizado por que la distancia entre los lados enfrentados de la masa de ensayo (PM) o el soporte (F) y, en cada caso, del péndulo simple (SP) o del péndulo invertido (IP) es de al menos 250 μm.
8. Sensor sísmico que comprende:
- un péndulo plegado que comprende una masa de ensayo (PM) y un soporte (F) ,
- un sistema para la detección del desplazamiento aparente de la masa de ensayo (PM) con respecto al soporte (F) , y caracterizado por que el péndulo plegado es el péndulo plegado según cualquier reivindicación 1 a 7.
9. Sensor sísmico según la reivindicación 8, caracterizado por que dicho sistema para la detección del desplazamiento aparente de la masa de ensayo (PM) es un sistema óptica y comprende:
- una fuente de luz que envía un haz de luz sobre dicha basa de ensayo (PM) y, precisamente, sobre
- un espejo que es enterizo con dicha masa de ensayo (PM) ,
- un dispositivo para la detección de la luz reflejada por dicho espejo;
- un dispositivo de elaboración electrónico para el cálculo de dicho desplazamiento aparente.
Frecuencia de resonancia -mHz
Patentes similares o relacionadas:
EQUIPO PARA EL ANÁLISIS DEL ESPECTRO DE VIBRACIÓN EN MATERIALES, del 5 de Marzo de 2020, de UNIVERSIDAD EAN: La invención se refiere a un escáner por vibraciones que incluye una base estática y una base amortiguada dentro de la cual se pondrá el objeto a analizar. La base estática […]
Procedimiento para la regulación de un motor de accionamiento de un vehículo con una determinación de velocidad y dispositivos, del 4 de Septiembre de 2019, de ROBERT BOSCH GMBH: Procedimiento para la regulación de un motor de accionamiento de un vehículo , el cual al menos comprende un sensor de vibraciones y una rueda […]
 Sistema y procedimiento para proteger máquinas rotatorias, del 31 de Julio de 2019, de GENERAL ELECTRIC COMPANY: Un procedimiento para identificar una condición de desequilibrio dentro de una máquina rotatoria que comprende un rotor en un entorno de mucho ruido, comprendiendo el […]
Sistema y procedimiento para proteger máquinas rotatorias, del 31 de Julio de 2019, de GENERAL ELECTRIC COMPANY: Un procedimiento para identificar una condición de desequilibrio dentro de una máquina rotatoria que comprende un rotor en un entorno de mucho ruido, comprendiendo el […]
Estimación de interferencia y ruido en un sistema OFDM, del 11 de Abril de 2019, de QUALCOMM INCORPORATED: Un procedimiento para estimar el ruido en un sistema de multiplexación por división de frecuencia ortogonal, OFDM, , el procedimiento que comprende: […]
Procedimiento y dispositivo para el análisis de vibraciones así como base de datos de patrones para ello y utilización de una base de datos de patrones, del 7 de Marzo de 2019, de Qass GmbH: Procedimiento para el análisis de vibraciones, en el que se detectan y evalúan las vibraciones producidas durante el uso de un componente, en […]
Procedimiento de valoración de ruidos molestos, del 27 de Febrero de 2019, de BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT: Procedimiento de valoración de ruidos molestos en vehículos automóviles, en el que se dividen los ruidos producidos durante un tiempo de medida prefijado […]
Procedimiento y dispositivo para el monitoreo de estado de palas de rotor, del 27 de Febrero de 2019, de Wölfel Engineering GmbH + Co. KG: Procedimiento para el monitoreo de estado de palas de rotor de aerogeneradores, evaluándose señales de al menos un sensor, monitoreándose los cambios de al menos una frecuencia […]
Monitorización de una máquina con un componente de máquina rotatorio, del 19 de Noviembre de 2018, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para la monitorización de una máquina con un componente de máquina rotatorio, registrándose de manera automatizada - en tiempos de medición sucesivos […]