Máquina multifuncional robotizada para el mecanizado en bordes anulares.
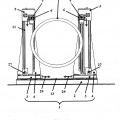
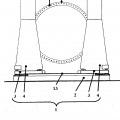
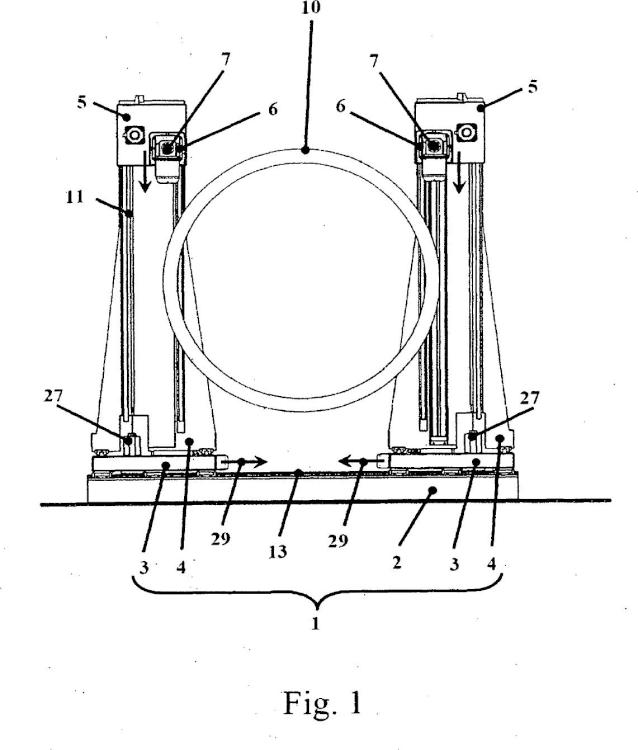
Máquina multifuncional robotizada para el mecanizado en bordes anulares mediante herramientas soportadas por medios portaherramientas y que incluye una base (2) que incluye en la parte superior primeros medios de guía (13) capaces de guiar el movimiento de al menos una base (3) en una primera dirección (29) en un plano horizontal respecto a dicha base (2),
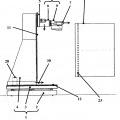
incluyendo cada una de dichas bases (3) medios motores correspondientes (27) de la base, siendo los medios motores de cada base independientes con respecto a los medios motores de las otras bases, incluyendo cada una de dichas bases (3) en la parte superior segundos medios de guía (12) capaces de guiar el movimiento de una torre vertical (4) en una segunda dirección (30) en un plano horizontal respecto a dicha base (2), siendo dicha segunda dirección ortogonal respecto a dicha primera dirección, incluyendo cada una de dichas torres verticales (4) medios motores (28) de la torre, siendo los medios motores de cada torre independientes con respecto a los medios motores de las otras torres, incluyendo cada torre vertical (4), frontalmente respecto a una pieza (10), medios de guía verticales (11) capaces de guiar el movimiento de al menos una placa de sujeción de brazo (5), incluyendo cada placa de sujeción de brazo (5) medios motores (16) de la placa de sujeción de brazo, siendo los medios motores de cada placa de sujeción de brazo (5) independientes con respecto a los medios motores de las otras placas de sujeción de brazo (5), soportando cada placa de sujeción de brazo (5) un brazo portaherramientas (6), incluyendo dicho brazo portaherramientas (6) un antebrazo (8) integral con dicha placa de sujeción de brazo (5) y una cabeza (9) soportada por dicho antebrazo (8), siendo dicha cabeza (9) giratoria respecto a dicho antebrazo (8) según un primer eje de rotación (31), incluyendo dicho antebrazo (8) medios de rotación (17) de la cabeza, soportando dicha cabeza (9) un portaherramientas (7), siendo dicho portaherramientas (7) giratorio respecto a dicha cabeza (9) según un segundo eje de rotación (32), siendo dicho segundo eje de rotación (32) ortogonal respecto a dicho primer eje de rotación (31), incluyendo dicha cabeza (9) medios de rotación (18) del portaherramientas, constituyendo el ensamblaje de dicho antebrazo (8), de dicha cabeza (9) y de dicho portaherramientas (7) un brazo portaherramientas con 2 ejes polares, un eje polar corresponde a la rotación de dicha cabeza (9) respecto a dicho antebrazo (8) y el otro eje polar corresponde a la rotación de dicho portaherramientas (7) respecto a dicha cabeza (9), y caracterizada por el hecho de que:
- Dichas bases (3) son dos, cada una de dichas bases (3) incluye medios motores correspondientes (27) de la base, siendo los medios motores de cada base independientes con respecto a los medios motores de la otra base, incluyendo cada una de dichas bases (3) en la parte superior segundos medios de guía (12) capaces de guiar el movimiento de una torre vertical (4), siendo los medios motores de una torre vertical independientes con respecto a los medios motores de la otra torre vertical.
- Dicha máquina incluye medios motores de dicha máquina (1) entre estaciones de trabajo diferentes.
- Dichos medios motores (27) de la base y dichos primeros medios de guía (13) son un sistema de mecanismo de vía y/o, por que dichos medios motores (28) de la torre y dichos segundos medios de guía (12) son un sistema de mecanismo de vía.
- Dichos medios motores (16) de la placa de sujeción de brazo y dichos medios de guía verticales (11) son un sistema de mecanismo de vía.
- Dicho portaherramientas (7) incluye una cámara de succión (26), dicha cámara de succión es capaz de estar tendida en la superficie de la pieza (10) antes de que una herramienta (24) comience a ejecutar un mecanizado correspondiente en dicha pieza (10), siendo el portaherramientas (7) móvil en guías (25) respecto a dicha cámara de succión (26), siendo mantenido el contacto entre dicha cámara de succión (26) y dicha superficie de la pieza (10) en la duración entera de dicho mecanizado;
- y, por que, cada brazo portaherramientas (6) funciona en un plano de trabajo inclinado en un ángulo determinado respecto a un plano de mecanizado correspondiente de la pieza, dicho ángulo está entre +/- 90 grados;
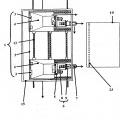
- cada una de dichas torres comprende más de una de dichas placas de sujeción de brazo (5), cada una de las cuales soporta una correspondiente a dicho brazo portaherramientas (6), cada una de dichas placas de sujeción de brazo (5) montada sobre la misma torre vertical (4) siendo móvil independientemente de las otras placas de sujeción de brazo (5) montadas sobre la misma torre vertical (4);
- la máquina aloja simultáneamente herramientas de funcionamiento, siendo dichas herramientas de funcionamiento simultáneo más de una herramienta de perforación axial (20) destinada a desempeñar agujeros axiales (22) y más de una herramienta de perforación radial (21) destinada a desempeñar agujeros radiales (23) además más de una herramienta de corte (19) y cabezal rectificador;
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/009016.
Solicitante: Chiarottin S.R.L.
Nacionalidad solicitante: Italia.
Dirección: Via A. Carpene' 14 33070 Maron di Brugnera (PN) ITALIA.
Inventor/es: CHIAROTTIN,MARVI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Accesorios montados sobre las máquinas herramientas para mantener las herramientas o los órganos de las máquinas en buenas condiciones de trabajo o para enfriar las piezas trabajadas; Dispositivos de seguridad especialmente combinados con las máquinas-herramientas, dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas (en lo que respecta a las máquinas de escariar o de perforar B23B 47/24, B23B 47/32 tienen prioridad; dispositivos de seguridad en general F16P).
PDF original: ES-2509494_T3.pdf
Fragmento de la descripción:
Máquina multifuncional robotizada para el mecanizado en bordes anulares
5 Campo técnico
10001 J La presente invención se refiere a una máquina multifuncional robotizada para el mecanizado en
bordes anulares según las caracteristicas de la parte precaracterizante de la reivindicación 1 (ver, por
ejemplo, DE 198 1033) .
10
Técnica anterior
10002] Las soluciones de la técnica anterior con respecto a máquinas multifuncionales (obotizadas para el
mecanizado en bordes anulares, en general proporcionan el movimiento de la pieza con respecto a la
15 máquina, haciendo dicho movimiento necesarias las operaciones manuales para la alineación de la pieza con
respecto a la máquina, el acercamiento de la pieza, que realiza el mecanizado y la eliminación sucesiva de la
pieza de la máquina con el objetivo de ser capaz de repetir sucesivamente la misma secuencia en otra pieza.
10003) El mecanizado realizado por la máquina es esencialmente una serie sucesiva de diferentes cidos de
20 mecanizado que incluye cortar un anillo, un acabado superficial de la superficie de corte y la ejecución
sucesiva de dos series de agujeros, una serie de agujeros comprende agujeros obtenidos en la dirección
radial y la otra serie de agujeros comprende agujeros obtenidos en la dirección perpendicular con respecto a
la base anular.
25 {0004) DE 1981033 divulga una disposición o robot con un plano de tratamiento con guias longitudinales
mutuamente paralelas, una compuerta con forma de U elevada sobre el plano de tratamiento, una unidad de
accionamiento para movimiento de compuerta long itudinal, y un brazo de herramienta fijado a una unidad de
marcación cruzada guiada en una guía de cruce para una barra de soporte y en una guía vertical para el
brazo de herramienta.
30 Una segunda unidad de accionamiento se usa para movimiento transversal de la unidad de marcación
cruzada, y un tercer accionamiento para movimiento vertical del brazo de herramienta en la unidad de
marcación cruzada y una unidad de módulo giratorio fijada al brazo de herramienta.
La unidad de módulo giratorio tiene módulos giratorios primeros y segundos con ejes mutuamente
perpend icutares y un portador de herramienta en et segundo módulo g iratorio.
35
10005) US2007f199187 proporciona un bastidor de base situado por debajo de un eje horizontal; un par de
un idades de grapa situadas en tos dos extremos sobre el bastidor de base; un par de unidades de soporte
que sostienen horizontalmente la pieza larga en dos ubicaciones, y que son capaces de moverse
verticalmente; y unidades de mecanizado que son capaces del mecan izar la pieza larga.
40 Los dos un idades de grapa son capaces de moverse desde el exterior hacia el interior, que sostienen la pieza
targa en dos ubicaciones y giran alrededor del eje horizontal en sincronización entre sí.
10006] WO 02f094500 se refiere a un centro de trabajo para el mecanizado de las partes en general, que
comprende al menos una unidad de trabajo equipada con med ios para el mecanizado de las partes y que
45 comprende además med ios de soporte para las partes, operativamente asociadas a dicha un idad de trabajo,
donde la un idad de trabajo se mueve a lo largo de un primer y un segundo eje de movimiento perpendicular
entre sí y alrededor de dos ejes de rotación , y donde la unidad de trabajo y los med ios de soporte son
móviles en el movim iento relativo a lo largo de un tercer eje de movimiento dispuesto ortogonalmente al
cuarto eje.
so
10007J EP 1122027 divulga una cabeza de maquinación que es accionable a lo largo de un eje vertical y dos
ejes horizontales respecto a una pieza sujetada en un dispositivo de sujeción de pieza, y que tiene, a niveles
progresivamente inferiores a lo largo de dicho eje vertical , uno o dos husos de alta velocidad , uno o dos
husos de baja velocidad y uno o dos husos fuera de dentro a fuera , todos dispuestos en ángulos rectos a
55 dicho eje vertical y conducidos por uno o varios motores montados sobre la cabeza.
La cabeza de mecanizado puede llevar los husos de alta velocidad para cooperar con una revista de cambio
de herramienta.
El dispositivo de sujeción de pieza se adapta para llevar dos conjuntos de piezas en soportes respectivos, y
para desviar dichos soportes uno tras otro entre una posición de trabajo cerca de la cabeza y una posición de
60 cambio de herramienta lejana a la cabeza.
10008] DE19919645 divulga un dispositivo de agarre separado del huso especialmente para una herramienta
de rotación.
La máquina-herramienta comprende un soporte de pieza de trabajo y una perforación y una cabeza de corte
65 que aloja un huso conducido giratoriamente.
El extremo inferior del huso incluye una cavidad para recibir una herramienta usada para manufacturar de la
pieza de trabajo. El soporte de pieza de trabajo y la cabeza de cortefperforadora se puede mover espacialmente con respecto una a la otra. El soporte de pieza de trabajo dispone de un mecanismo giratorio para girar una pieza de trabajo grapada
alrededor de un eje de modo que se puede producir utilizando una herramienta de rotación.
{OO09) GB 2307431 divulga una máquina-herramienta con una cabeza de torreta que se puede rotar para indexar uno de los elementos de montaje de herramienta en una posición de mecanizado. Tiene un primer cuerpo de soporte que se conecta a un mecanismo de movimiento que avanza o retrae la cabeza de torreta a lo largo de un eje que coincide con el eje del elemento de montura de herramienta en la posición de mecanizado. Un segundo cuerpo de soporte móvil a lo largo del eje de mecanizado se soporta en el primer cuerpo de soporte, y la cabeza de torreta es soportada de fonna giratoria en el segundo cuerpo de soporte para indexar. Una cabeza de huso es fijada al primer cuerpo de soporte, y un husillo se soporta en la cabeza de huso.
Un portaherramientas para ser sujetado por el elemento de la montura de herramienta se acopla con o es separado del huso mediante el movimiento del segundo cuerpo de soporte relativamente al primer cuerpo de soporte.
Problemas de la técnica anterior
10010) La alineación y operaciones de movimiento manual de la pieza con respecto a la máquina implican un gasto de tiempo considerable que no se usa para el mecanizado en un sentido estrecho.
10011] Por otra parte, dichas operaciones deben necesariamente ocurrir lentamente para evitar daf'ios en la 25 máquina y debido a la masa considerable de las piezas sometidas a la maquinación que pueden tener diámetros aún mayores a 3 metros.
10012) Por ejemplo, este es el caso de DE1981033 donde es preciso para el operador situar la pieza en el plano de operación del robot antes del inicio del mecanizado. Además, el robot descrito en DE1981033 puede difícilmente ser usado para la operación combinada de más de una herramienta debido a la estructura de soporte de las herramientas, que fácilmente proporcionará interferencias entre diferentes herramientas operativas simultáneamente, causando esto un aumento en el tiempo de procesamiento requerido en el caso de mecanizado complejo para ser realizado en la pieza.
(0013) También en lo que se refiere a US20Q7/199187 están presentes inconvenientes diferentes, el principal de los cuales se refiere al hecho de que las dos unidades de soporte de pieza y las unidades de grapa de pieza intervienen en el mismo bastidor de base, causando esto el hecho de que la máquina de trabajo no sea capaz de desempei'iar otro mecanizado en otras piezas hasta que todas las operaciones que tienen que ser hechas en la pieza actual son tenninadas. Si ocurre un problema en la pieza o si es preciso ejecutar otros tipos de mecanizado que no son soportados, entonces la máquina de trabajo debe ser detenida hasta que el problema es resuelto o hasta que el mecanizado adicional necesario es completado.
10014) WO 021094500, EP 1122027 Y DE19919645 son concebidos de manera que también las piezas son 45 móviles porque se fijan a medios de soporte que son móviles según un movimiento a lo largo de un tercer eje del movimiento. Esta solución presenta inconvenientes importantes en el caso donde las piezas son pesadas, requiriendo por lo tanto un encolado considerable de los medios de control de los medios de soporte de piezas. Además, el mecanizado particulannente preciso puede ser difícilmente realizado debido a la necesidad de coordinar el movimiento y la posición de la unidad de maquinación y de los medios de soporte.
10015) La solución descrita en GB 2307431 puede ser difícilmente adaptada para sostener más de una cabeza de trabajo independiente en la misma torre, debido a que la solución... [Seguir leyendo]
Reivindicaciones:
5 10 15 20 25 1. Máquina multifu ncional robotizada para el mecanizado en bordes anulares mediante herramientas soportadas por medios portaherramientas y que induye una base (2) que incluye en la parte superior primeros medios de 9ula (13) capaces de 9uiar el movimiento de at menos una base (3) en una primera dirección (29) en un plano horizontat respecto a dicha base (2) , incluyendo cada una de dichas bases (3) medios motores correspond ientes (27) de la base, siendo los med ios motores de cada base independientes con respecto a los medios motores de las otras bases, incluyendo cada una de dichas bases (3) en la parte superior segundos medios de guía (12) capaces de guiar el movimiento de una torre vertical (4) en una segunda dirección (30) en un plano horizontat respecto a dicha base (2) , siendo dicha segunda dirección ortogonat respecto a dicha primera dirección, inctuyendo cada una de dichas torres verticales (4) medios motores (28) de la torre, siendo los medios motores de cada torre independientes con respecto a los medios motores de las otras torres, incluyendo cada torre vertical (4) , frontalmente respecto a una pieza (10) , medios de guía verticales (1 1) capaces de gu iar el movimiento de al menos una placa de sujeción de brazo (5) , incluyendo cada placa de sujeción de brazo (5) medios motores (16) de la placa de sujeción de brazo, siendo los med ios motores de cada placa de sujeción de brazo (5) independientes con respecto a los medios motores de las otras placas de sujeción de brazo (5) , soportando cada placa de sujeción de brazo (5) un brazo portaherramientas (6) , induyendo dicho brazo portaherramientas (6) un antebrazo (8) integral con dicha placa de sujeción de brazo (5) y una cabeza (9) soportada por dicho antebrazo (8) , siendo dicha cabeza (9) giratoria respecto a dicho antebrazo (8) según un primer eje de rotación (31) , incluyendo dicho antebrazo (8) medios de rotación (17) de la cabeza, soportando dicha cabeza (9) un portaherramientas (7) , siendo dicho portaherramientas (7) giratorio respecto a dicha cabeza (9) según un segundo eje de rotación (32) , siendo dicho segundo eje de rotación (32) ortogonal respecto a dicho primer eje de rotación (31) , incluyendo dicha cabeza (9) med ios de rotación (18) del portaherramientas, constituyendo el ensamblaje de dicho antebrazo (8) , de dicha cabeza (9) y de dicho portaherramientas (7) un brazo portaherramientas con 2 ejes polares, un eje polar corresponde a la rotación de dicha cabeza (9) respecto a d icho antebrazo (8) y el otro eje polar corresponde a la rotación de dicho portaherramientas (7) respecto a dicha cabeza (9) , y caracterizada por el hecho de que:
30 35 -Dichas bases (3) son dos, cada una de dichas bases (3) incluye medios motores correspondientes (27) de la base, siendo los medios motores de cada base independientes con respecto a los medios motores de la otra base, incluyendo cada una de dichas bases (3) en la parte superior segundos medios de gu ia (12) capaces de guiar el movimiento de una torre vertical (4) , siendo los med ios motores de una torre vertical independientes con respecto a los medios motores de la otra torre vertical. -Dicha máquina incluye medios motores de dicha máquina (1) entre estaciones de trabajo diferentes.
40 -Dichos medios motores (27) de la base y dichos primeros medios de guía (13) son un sistema de mecanismo de vía y/o, por que dichos medios motores (28) de la torre y dichos segundos med ios de guía (12) son un sistema de mecanismo de via.
- Dichos med ios motores (16) de la placa de sujeción de brazo y dichos medios de guía verticales (1 1) son un sistema de mecanismo de via.
45 so -Dicho portaherramientas (7) incluye una cámara de succión (26) , dicha cámara de succión es capaz de estar tend ida en la superficie de la pieza (10) antes de que una he rramienta (24) comience a ejecutar un mecanizado correspond iente en dicha pieza (10) , siendo el portaherramientas (7) móvil en guias (25) respecto a dicha cámara de succión (26) , siendo mantenido el contacto entre dicha cámara de succión (26) y dicha superficie de la pieza (10) en la duración entera de dicho mecanizado;
- y, por que, cada brazo portaherramientas (6) funciona en un plano de trabajo inclinado en un ángulo determinado respecto a un plano de mecanizado correspondiente de la pieza, dicho ángulo está entre +/-90 grados;
55 -cada una de dichas lorres comprende más de una de dichas placas de sujeciÓn de brazo (5) , cada una de las cuales soporta una correspondiente a dicho brazo portaherramientas (6) , cada una de dichas placas de sujeción de brazo (5) montada sobre la misma torre vertical (4) siendo móvil independientemente de las otras placas de sujeción de brazo (5) montadas sobre la misma torre vertical (4) ;
60 -la máquina aloja simultáneamente herramientas de funcionamiento, siendo dichas herramientas de funcionamiento simultáneo más de una herramienta de perforación axial (20) destinada a desempeñar agujeros axiales (22) y más de una herramienta de perforación rad ial (21) destinada a desempeñar agujeros radiales (23) además más de una herramienta de corte (19) y cabezal rectificador;
65 -Y se pueden colocar piezas en una posición inclinada con respecto a la máquina según cualquier plano de inclinación dentro de +/-90 grados con respecto al plano de la máquina.
9
2. Máquina robotizada multifuncional para el mecanizado en bordes anulares según la reivindicación 1 caracterizada por el hecho de que se asocia a un sistema de mando numérico informatizado con pr09rama correspondiente para la gestión de los movimientos y de las operaciones de mecanizado, programado según un programa de mecanizado predeterminado de dicha pieza.
3. Máquina robotizada multifuncional para el mecanizado en bordes anulares según cualquiera de las reivindicaciones precedentes caracterizada por el hecho de que esta incluye 4 herramientas de perforación axial (20) , 4 herramientas de perforación radial (21) Y al menos una herramienta de corte (19) .
Patentes similares o relacionadas:
Máquina herramienta dental, del 15 de Julio de 2020, de IVOCLAR VIVADENT AG: Máquina herramienta dental, en particular fresadora dental , con una herramienta intercambiable, en particular a través de un banco de herramientas , […]
CABEZAL PORTAHERRAMIENTAS CON INDUCTOR DE REFRIGERANTE A MUY ALTA PRESIÓN INCORPORADO, del 14 de Julio de 2020, de MADAULA MATENCIO, Josep Eduard: 1. Cabezal portaherramientas con inductor de refrigerante a muy alta presión incorporado que, consistente en un cabezal portaherramientas rotativo, aplicable para montar […]
Máquina y método de procesamiento de superficies herméticas, del 22 de Abril de 2020, de Mitsubishi Hitachi Power Systems, Ltd: Una máquina de procesamiento de superficies herméticas (1; 1A; 1B; 1C) para realizar el corte de una superficie de unión de un miembro hermético en un cuerpo […]
Máquina lavadora para perfiles largos con cubierta de lámina y procedimiento para lavar perfiles largos, del 8 de Abril de 2020, de Rattunde AG: Dispositivo de lavado para perfiles largos con un tambor que puede girar alrededor de un eje de rotación horizontal con una pluralidad de alojamientos […]
Dispositivo de detención de vibración, del 11 de Marzo de 2020, de MATSUURA MACHINERY CORPORATION: Un sistema que incluye: una pieza columnar que está dividida, a lo largo de una dirección circunferencial, en una zona de procesamiento formada en un estado […]
Máquina herramienta, del 15 de Enero de 2020, de HOMAG GmbH: Máquina herramienta para el mecanizado de preferiblemente piezas de trabajo en forma de placa, que están compuestas preferiblemente, al menos por secciones, […]
Amortiguador de masa ajustado montado sobre cabezal simétrico, del 27 de Noviembre de 2019, de Fives Machining Systems, Inc: Un amortiguador de masa ajustado montado en un cabezal de máquina herramienta , montado sobre el extremo de un brazo que tiene una […]
Máquina de fresado de pórtico, del 21 de Noviembre de 2019, de INNSE-BERARDI S.P.A. SOCIETA' UNIPERSONALE: 1. Máquina de fresado de pórtico , provista de: - un par de montantes separados entre sí en una dirección transversal (Y), en la que cada montante se […]