Máquina de suministro de bolsas vacías del tipo de cargador transportador.
Una máquina de suministro de bolsas vacías del tipo de cargador transportador que comprende:
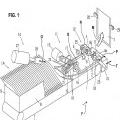
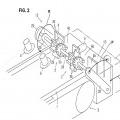
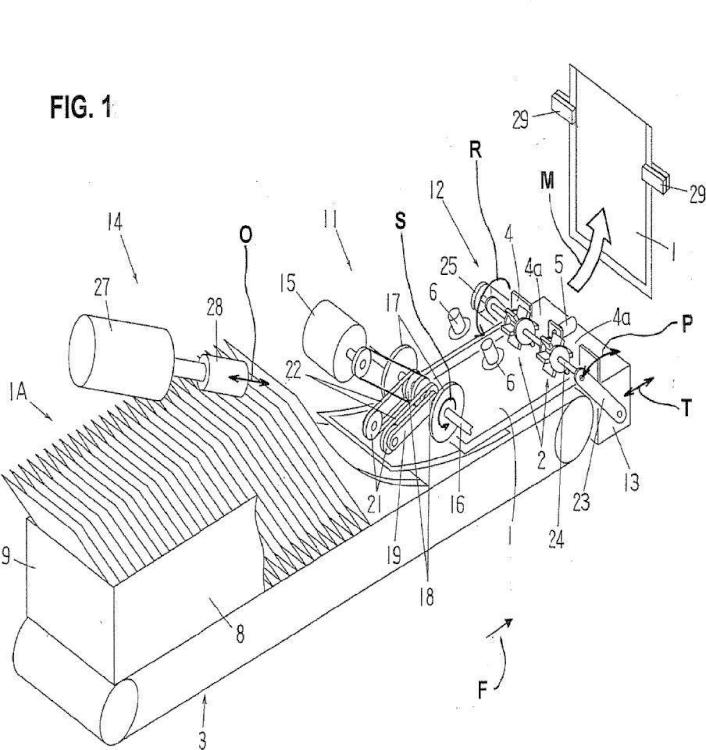
una cinta transportadora (3) para para hacer avanzar un conjunto de bolsas vacías (1) apiladas con un desplazamiento en la dirección paralela a una dirección de transporte del transportador de forma que las bocas de las bolsas miren hacia delante en la dirección del transporte y que las bolsas superiores se impulsen hacia delante en la dirección del transporte;
un medio (11) de separación de bolsas vacías dispuesto sobre la cinta transportadora (3) para separar la bolsa vacía de más arriba del conjunto de bolsas vacías y para hacer avanzar a la bolsa vacía separada;
un tope (4) de posicionamiento que tiene una superficie de parada y está dispuesto próximo a un extremo delantero de la cinta transportadora de forma que un extremo frontal de la bolsa vacía separada sobre la cinta transportadora se pone en contacto con la superficie 4a de parada;
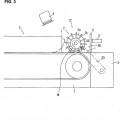
una rueda (2) de trinquete dispuesta sobre un lado delantero del medio (11) de separación de bolsas vacías y formada con una pluralidad de elementos flexibles (2b) de trinquete extensibles radialmente alrededor de ella, estando conectada la rueda (2) de trinquete a una fuente de accionamiento, girando mientras que se desplaza entre una posición de entrega y una posición retraída, por tanto entrando en contacto en la posición de entrega con la bolsa vacía (1) que se alimenta mediante los medios (11) de separación de bolsas, haciendo avanzar la bolsa vacía (1), y provocando que la bolsa vacía entre en contacto con el tope (4) de posicionamiento, y un elemento (6) de aspiración de bolsas vacías desplazable arriba y abajo entre la posición de aspiración y la posición de recogida situada más arriba que la posición de aspiración, adhiriéndose el miembro (6) de aspiración en la posición de aspiración a la superficie superior de la bolsa vacía posicionada mediante el tope (4) de posicionamiento, donde la posición de entrega de la rueda (2) de trinquete se encuentra entre el tope (4) de posicionamiento y los miembros (6) de aspiración, y la posición retraída de la rueda de trinquete se encuentra sobre el lado frontal que está más allá de la superficie de parada del tope (4) de posicionamiento.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13003137.
Solicitante: TOYO JIDOKI CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 18-6, TAKANAWA 2-CHOME, MINATO-KU TOKYO JAPON.
Inventor/es: Yoshikane,Tohru, MURASHIGE,MASAHIKO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B43/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › Alimentación de sacos o cintas de cartón separadamente a partir de pilas o de cargadores.
- B65H1/22 B65 […] › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 1/00 Soportes o cargadores para pilas desde los cuales se van a separar los artículos (soportes utilizados para la unión, colocación o agrupado de artículos B65H 39/00; combinaciones de operaciones de apilado y desapilado de artículos que presentan otro interés que la operación individual de apilado o desapilado de artículos B65H 83/00). › desplazándose en el sentido del plano de los artículos, p. ej. para hacer avanzar en bloque pilas expuestas.
- B65H3/00 B65H […] › Sacado de artículos de las pilas (unión, colocación o agrupado de artículos B65H 39/00; máquinas para separar bandas superpuestas B65H 41/00; desapilado de material delgado combinado con el plegado B65H 45/26; combinaciones de operaciones de apilado y de sacado de artículos, presentando un interés distinto de la operación individual de apilado o de sacado B65H 83/00).
- B65H5/06 B65H […] › B65H 5/00 Transferencia de artículos sacados de las pilas; Alimentación de artículos a las máquinas (mecanismos o elementos idénticos para la libertad o progresión de artículos a la salida de las máquinas B65H 29/00; recirculación de artículos B65H 85/00). › por rodillos.
PDF original: ES-2497968_T3.pdf
Fragmento de la descripción:
Máquina de suministro de bolsas vacías del tipo de cargador transportador Antecedentes de la invención
1. Campo de la invención
La presente invención se refiere a una mejora en una máquina de suministro de bolsas vacías del tipo de cargador transportador usada para suministrar bolsas vacías a una embaladora de llenado de bolsas. Tal máquina es conocida por ejemplo por el documento EP2149499 A1
2. Descripción de la técnica relacionada
La Solicitud de Patente Japonesa (Kokai) ya publicada nº 2003-137219 divulga una máquina de suministro de bolsas vacías del tipo de cargador transportador utilizado para suministrar bolsas vacías a una embaladora de llenado de bolsas del tipo rotativo de forma intermitente. Esta máquina de suministro de bolsas vacías del tipo de cargador transportador incluye: una cinta transportadora para transportar un conjunto de bolsas vacías apiladas con un desplazamiento en la dirección de adelante hacia atrás de la dirección de transporte de la cinta transportadora (o en una dirección paralela a ella) de forma que las bocas de las bolsas miran hacia delante y las bolsas vacías superiores se desplazan hacia delante, una cinta de alimentación rápida (un medio de separación de bolsas vacías) , dispuesta sobre la cinta transportadora, ruedas de trinquete dispuestas sobre una cara delantera de la cinta de alimentación rápida, un tope de posicionamiento dispuesto próximo al extremo delantero de la cinta transportadora, y miembros de aspiración de bolsas vacías dispuestos entre las ruedas de trinquete y el tope de posicionamiento.
En la estructura anterior, la cinta de alimentación rápida separa la bolsa superior vacía del conjunto de las bolsas vacías sobre la cinta transportadora y la hace avanzar. Las ruedas de trinquete, que tienen una pluralidad de elementos de trinquete flexibles radialmente extensibles (proyecciones) dispuestos alrededor de ellas, están conectadas a una fuente de accionamiento y giran, mientras se desplazan hacia arriba y abajo entre su posición de entrega inferior y su posición retraída superior, de tal manera que, en la posición de entrega, entran en contacto con la bolsa vacía alimentada por la cinta de alimentación rápida y se hacen avanzar aún más hacia adelante, haciendo que la bolsa entre en contacto con el tope de posicionamiento. El tope de posicionamiento, que se dispone próximo al extremo delantero de la cinta transportadora, se utiliza para el posicionamiento de las bolsas vacías suministradas por las ruedas de trinquete. Los miembros de aspiración de bolsas vacías se desplazan arriba y abajo entre su posición inferior de aspiración, en la que se adhieren a la superficie superior de una bolsa vacía colocada por el tope de posicionamiento, y su posición superior de recogida.
Además, se proporciona un mandril utilizado para el transporte de bolsas vacías entre la máquina de suministro de bolsas vacías del tipo de cargador transportador y la embaladora de llenado de bolsas del tipo rotativo de forma intermitente. Cuando los o de las bolsas vacías llegan a la posición de recogida, la parte del borde superior de la bolsa vacía adherida es agarrada por este mandril, y, posteriormente, la bolsa vacía es transportada por el mandril y se transfiere a las garras de la embaladora de llenado de bolsas del tipo rotativo de forma intermitente.
La Patente Japonesa nº 3.639.199 divulga otro tipo de máquina de suministro de bolsas vacías del tipo de cargador transportador utilizada para suministrar bolsas vacías a una embaladora de llenado de bolsas. La construcción básica de esta máquina de suministro de bolsas vacías del tipo de cargador transportador es sustancialmente la misma que la de la Solicitud de Patente Japonesa ya publicada (Kokai) nº 2003-137219 en el que una bolsa vacía que avanza hacia adelante mediante la cinta de alimentación rápida se hace avanzar aún más adelante y provoca que entre en contacto con el tope de posicionamiento mediante ruedas de trinquete, dispuestas detrás de los o de bolsas vacías; sin embargo, en la máquina de Patente Japonesa nº 3.639.199 se disponen de rodillos giratorios en vez de ruedas de trinquete, de forma que los rodillos giratorios se desplazan arriba y abajo de una manera oscilante y en equilibrio con un equilibrador en una posición que está sustancialmente alineada con los o de bolsas vacías.
La máquina de suministro de bolsas vacías del tipo de cargador transportador descrita en la Solicitud de Patente Japonesa ya publicada (Kokai) nº 2003-137219 tiene varios problemas como se describe a continuación:
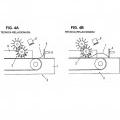
(1) Debido a que las ruedas de trinquete se disponen entre la cinta de alimentación rápida y los o de bolsas vacías, el hueco entre las ruedas de trinquete y el tope de posicionamiento es relativamente amplio. Por esta razón, una bolsa vacía alimentada por las ruedas de trinquete, después de haber entrado en contacto con el tope de posicionamiento, se comba hacia arriba o experimenta una deformación convexa, lo que resulta en problemas tales como errores de posicionamiento de las bolsas vacías y errores de recogida que se producirían cuando los o de bolsas vacías recojan las bolsas vacías. Esto se describirá a continuación con referencia a las Figuras 4A y 4B. En las Figuras 4A y 4B, el número de referencia 1 designa una bolsa vacía, 2 una rueda de trinquete, 3 una cinta transportadora, 4 un tope de posicionamiento, 5 un sensor de detección de posición, 6 un elemento de aspiración de bolsas vacías, 7 un sub-bastidor de cinta transportadora, y 8 una guía lateral para la cinta transportadora.
(1) Cuando una bolsa vacía 1 se hace avanzar por la cinta de alimentación rápida (no ilustrada) , las ruedas 2 de trinquete, que giran en la dirección de la flecha curvada, descienden desde la posición retraída indicada por la línea discontinua a la posición de entrega indicada por la línea continua, y entra en contacto con la superficie superior de la bolsa vacía 1 en la cinta transportadora 3, y la bolsa vacía 1 se hace avanzar aún más sobre la cinta transportadora 3 mediante las ruedas 2 de trinquete, y su extremo frontal (borde de boca) entra en contacto con el tope 4 de posicionamiento, y a continuación, la bolsa se coloca correctamente mediante el tope 4 de posicionamiento. El sensor 5 de detección de posición detecta la bolsa 1 así posicionada. Después de la detección mediante el sensor 5 de detección de posición, las ruedas 2 de trinquete se mantienen en la posición de entrega durante algún tiempo con el fin de permitir la determinación fiable de la posición de la bolsa 1 y continuar la alimentación de la bolsa 1. Posteriormente, las ruedas de trinquete se elevan a la posición retraída. En ese momento, como resultado de la sobrealimentación mediante las ruedas 2 de trinquete, la parte frontal de la bolsa vacía se puede doblar hacia arriba (como se ilustra en la Figura 4A) o sufrir una deformación convexa (como se ilustra en la Figura 4B) , lo que conduce a errores de posicionamiento y errores de recogida cuando los elementos 6 de aspiración de bolsas vacías recogen la bolsa. Este problema es especialmente significativo cuando la bolsa vacía 1 es relativamente blanda.
(2) En la máquina de suministro de bolsas vacías del tipo de cargador transportador, la posición de entrega de las ruedas 2 de trinquete se establece mecánicamente en avance. Por esta razón, si la bolsa vacía 1 suministrada está fabricada de material relativamente grueso, o si hay un montón de una pluralidad de bolsas vacías 1 alimentadas por la cinta de alimentación rápida, aumenta la fuerza de contacto de las ruedas 2 de trinquete aplicada sobre la bolsa vacía 1 (el grado de doblado de los trinquetes flexibles) , lo que conlleva a una sobrealimentación y provoca que el problema (1) anteriormente descrito ocurra de manera pronunciada.
(3) Si la situación del tope 4 de posicionamiento se realiza de forma ajustable libremente en la dirección de adelante hacia atrás, cambiando después su situación es posible ajustar el hueco entre el extremo frontal de la bolsa vacía 1 y la posición de aspiración de los elementos 6 de succión bolsas vacías y cambiar la posición vertical de la bolsa vacía 1 suministrada a las garras de la máquina embaladora (y por tanto cambia la posición del sellado y la anchura vertical del sellado) . En esta configuración, cuando la posición del tope 4 de posicionamiento se desplaza hacia delante, el hueco entre el tope 4 de posicionamiento y las ruedas 2 de trinquete se ensancha, y esto provoca que el problema (1) anteriormente descrito ocurra también de una manera pronunciada también.
(4) el tiempo para el descenso de las ruedas 2 de trinquete a la posición de entrega se establece para que suceda después... [Seguir leyendo]
Reivindicaciones:
1. Una máquina de suministro de bolsas vacías del tipo de cargador transportador que comprende:
una cinta transportadora (3) para para hacer avanzar un conjunto de bolsas vacías (1) apiladas con un desplazamiento en la dirección paralela a una dirección de transporte del transportador de forma que las bocas de las bolsas miren hacia delante en la dirección del transporte y que las bolsas superiores se impulsen hacia delante en la dirección del transporte;
un medio (11) de separación de bolsas vacías dispuesto sobre la cinta transportadora (3) para separar la bolsa vacía de más arriba del conjunto de bolsas vacías y para hacer avanzar a la bolsa vacía separada;
un tope (4) de posicionamiento que tiene una superficie de parada y está dispuesto próximo a un extremo delantero de la cinta transportadora de forma que un extremo frontal de la bolsa vacía separada sobre la cinta transportadora se pone en contacto con la superficie 4a de parada;
una rueda (2) de trinquete dispuesta sobre un lado delantero del medio (11) de separación de bolsas vacías y formada con una pluralidad de elementos flexibles (2b) de trinquete extensibles radialmente alrededor de ella, estando conectada la rueda (2) de trinquete a una fuente de accionamiento, girando mientras que se desplaza entre una posición de entrega y una posición retraída, por tanto entrando en contacto en la posición de entrega con la bolsa vacía (1) que se alimenta mediante los medios (11) de separación de bolsas, haciendo avanzar la bolsa vacía (1) , y provocando que la bolsa vacía entre en contacto con el tope (4) de posicionamiento, y un elemento (6) de aspiración de bolsas vacías desplazable arriba y abajo entre la posición de aspiración y la posición de recogida situada más arriba que la posición de aspiración, adhiriéndose el miembro (6) de aspiración en la posición de aspiración a la superficie superior de la bolsa vacía posicionada mediante el tope (4) de posicionamiento, donde la posición de entrega de la rueda (2) de trinquete se encuentra entre el tope (4) de posicionamiento y los miembros (6) de aspiración, y la posición retraída de la rueda de trinquete se encuentra sobre el lado frontal que está más allá de la superficie de parada del tope (4) de posicionamiento.
2. La máquina de suministro de bolsas vacías del tipo de cargador transportador de acuerdo con la reivindicación 1, donde se establece un tiempo de desplazamiento de la rueda (2) de trinquete a la posición de entrega para que se produzca antes que un momento en el que el extremo frontal de la bolsa vacía (1) alimentada mediante los medios de separación de bolsas vacías alcance la posición de entrega de la rueda (2) de trinquete.
3. La máquina de suministro de bolsas vacías del tipo de cargador transportador de acuerdo con la reivindicación 1 o 2, donde un anillo (26) de regulación que tiene una superficie de forma de circunferencia con un diámetro menor que un diámetro de una trayectoria rotacional del extremo distal de los elementos (26) de trinquete instalados de forma giratoria sobre un eje de rotación para la rueda (2) de trinquete.
4. La máquina de suministro de bolsas vacías del tipo de cargador transportador de acuerdo con cualquiera de las reivindicaciones 1-3, donde se dispone un sub-bastidor (13) en el extremo delantero de la cinta transportadora
(3) de forma que sea ajustable en su posición para aproximarse o separarse entre ellas, y disponiéndose en el subbastidor (13) el tope (4) de posicionamiento y la rueda (2) de trinquete.
Patentes similares o relacionadas:
Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora, del 4 de Diciembre de 2019, de SIG TECHNOLOGY AG: Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora , en el que los envases se forman a partir de […]
Sistema y método de vaciar un conjunto de almacenamiento tubular, del 20 de Noviembre de 2019, de FUJI SEAL INTERNATIONAL, INC: Un sistema de vaciado para vaciar una pluralidad de recipientes flexibles desde un conjunto de almacenamiento tubular, en donde cada uno de los recipientes […]
Dispositivo de control óptico de una cara de un recorte, máquina de tratamiento de recortes y plegadora-encoladora que comprende el dispositivo, del 20 de Marzo de 2019, de BOBST MEX SA: Dispositivo de control óptico de una cara de un recorte , que comprende: - un transportador de vacío , adecuado para transportar […]
Dispositivo y procedimiento para el envasado de sacos abiertos, del 6 de Marzo de 2019, de HAVER & BOECKER OHG: Dispositivo para el envasado de productos a granel en sacos abiertos vacíos que comprende al menos un puesto de llenado y una […]
Montaje y método para el almacenamiento de recipientes, del 14 de Febrero de 2019, de FUJI SEAL INTERNATIONAL, INC: Montaje para el almacenamiento de una pluralidad de recipientes flexibles (1, 121a a f, 122a a f, 123a a f, 124a a f), el montaje comprende una pluralidad […]
Método de fabricación y de llenado de un envase y envase correspondiente, del 8 de Enero de 2019, de N.V. NUTRICIA: Método de fabricación y de llenado de un envase con un producto nutricional en polvo, método que comprende: a) proporcionar una cubeta formada térmicamente […]
Dispositivo y procedimiento para suministrar bolsitas a un carrusel, del 22 de Noviembre de 2018, de Fillshape S.r.l: Procedimiento para suministrar bolsitas a un carrusel concebidas para contener productos líquidos, viscosos o granulados, comprendiendo dicho procedimiento las etapas de: […]
Sistema de cámaras que comprende varias cámaras de alojamiento dispuestas una al lado de otra en paralelo para alojar bolsas de plástico, del 19 de Septiembre de 2018, de INDAG GESELLSCHAFT FUR INDUSTRIEBEDARF MBH & CO. BETRIEBS KG: Sistema de cámaras que comprende varias cámaras de alojamiento dispuestas una al lado de otra en paralelo para el alojamiento y la […]