Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos.
Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos.
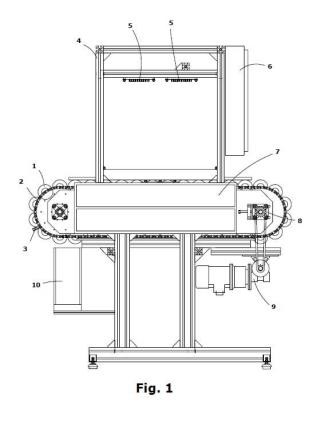
Comprende parejas de rodetes (1) arrastradas por cadenas, que definen alojamientos para el transporte de los frutos; los rodetes tienen giro libre e independiente; comprende unas guías de fricción superior (27) e inferior (25) que imprimen a los rodetes el movimiento necesario y en el sentido de giro deseado. Los rodetes se desplazan en una cámara provista de dispositivos de iluminación y captación de imágenes que se procesan informáticamente y determinan si el fruto es apto o no. Comprende un cabezal selector con caída libre de los frutos aceptados sobre una primera cinta de transporte, y sujeción de los frutos rechazados para ser liberados sobre una segunda cinta de transporte.
Alcanza la invención a un procedimiento de exhibición y selección realizado por dicha máquina.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201201171.
Solicitante: CITRODIAGNOSIS SELECTIVA, S.L.
Nacionalidad solicitante: España.
Inventor/es: GUAL PASALODOS, MARIANO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07C5/34 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › Clasificación en función de otras propiedades particulares.
- B65G17/24 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 17/00 Transportadores que tienen un elemento de tracción sin fin, p.ej. una cadena que transmite el movimiento a una superficie portante de cargas continua o sensiblemente continua, o a una serie de portacargas individuales; Transportadores de cadenas sin fin en los que las cadenas constituyen la superficie que lleva la carga. › que tienen una serie de rodillos que desplaza el elemento de tracción sobre una superficie portante para efectuar el transporte de cargas o de portacargas.
- B65G47/84 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Ruedas con forma de estrellas o dispositivos de correas o cadenas sin fin, estando dotadas las ruedas o dispositivos de elementos que enganchan a los objetos.
Fragmento de la descripción:
Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos.
La presente invención tiene por objeto una máquina que permite un análisis cualitativo e individualizado de los frutos en fresco, especialmente cítricos, en su procesamiento a gran volumen en centrales hortofrutícolas, para su control, distribución, empaquetado y comercialización posterior, atendiendo al factor de control cualitativo automático y selectivo, que garantiza la calidad deseada para su venta y distribución, y prestigio de marca comercial.
La máquina que se describe integra un sistema de transporte de frutos en forma de un conjunto de cadenas modulares que sustentan unos ejes a su vez de soporte de unos rodetes, que desplazan individualmente los frutos y los hace rotar en forma controlada, de modo que éstos su orientación varía a lo largo del recorrido, mostrando toda su superficie por rotación selectiva en todas direcciones, realizándolo en el mínimo espacio y tiempo.
Así, el objeto en su conjunto de la presente invención, es dotar a las centrales hortofrutícolas de un sistema automático y eficaz para la eliminación del podrido, (frutos invadidos por hongos que deben retirarse prioritariamente de los demás frutos sanos en la poscosecha, ya que infectan por contacto a los que les circundan). Permite también la detección precoz de los frutos con picada de mosca, indetectable por el ojo humano y la detección de frutos aún verdes lo que permite la desverdización automática en precampaña y otros tipos de defectos comunes como las manchas, las cicatrices, el rameado, defectos de esfericidad y forma, aguado, textura, etc.
Dado que las nuevas normativas legales son muy exigentes con la exposición de las personas los efectos de la radiación ultravioleta (la tría de selección manual de podrido, se realiza en las centrales hortofrutícolas en unos recintos cerradas, de nombre común "discotecas" donde se detectan visualmente las manchas iluminadas por tubos fluorescentes de iluminación ultravioleta. A dicha luz ultravioleta están expuestas las triadoras durante toda la campaña, con los correspondientes riesgos sanitarios y legales. Las normativas actuales exigen la mínima exposición y/o la supresión de estos procedimientos.
El sistema de selección automática que se propone es situado para su integración en la planta con posterioridad a la tría general, donde actualmente se encuentran las "discotecas" y en la sustitución de éstas, y antes de la aplicación de ceras, pero después de la previa tría, lavado y secado de los frutos para su correcta visualización con la mínima suciedad posible.
Se trata, por tanto, de sustituir las actuales cabinas de separación manual de podrido (discotecas), situadas posteriormente a las mesas de selección manual, por el sistema propuesto, que permite la selección y evacuación de los frutos con defectos comunes y podredumbre y picadas invisibles al ojo humano, y también la posible selección y discriminación por color, lo cual permitiría la desverdización en precampaña, lo que supone una mejora extraordinaria para las instalaciones con calibrado mecánico ya que se puede adaptar sin dificultad, sin tener que realizar importantes inversiones en reimplantaciones de maquinaria de calibrado electrónico.
De aplicación para escaneado de frutos por visión artificial y evaluación cualitativa posterior, particularmente en centrales de procesamiento y distribución de cítricos y otros frutos.
ANTECEDENTES DE LA INVENCIÓN
En la actualidad, existen sistemas de transporte de frutos para su discriminación y calibrado posterior, que están integrados como componentes de calibradores electrónicos capaces de diferenciar los frutos y explorar su superficie, con el fin de su evaluación por parámetros de calidad por selección óptica de defectos. Posteriormente se calibra su diámetro ecuatorial, su peso y su volumen y se distribuye a través de cintas integradas en el calibrador que reparten los frutos así calibrados a las diferentes zonas de confección y envasado de producto.
Si bien dichas instalaciones han supuesto un significativo avance en la información de los frutos a procesar y su procesamiento informático, requieren una importante inversión financiera así como una gran superficie para su instalación e integración en el conjunto de maquinaria de una central hortofrutícola.
La instalación del tipo calibrado electrónico, exige una distribución lineal de su estructura y unas cintas de distribución perpendiculares al mismo y distribuidas en toda su longitud a unas distancias mínimas unas de otras, lo cual conforma unas exigencias importantes en cuanto a dimensiones de maquinaria y por tanto un elevado coste y una lenta amortización en relación a la maquinaria convencional de calibrado central de rodillos basculantes.
En el calibrado electrónico para productos hortícolas antes comentado, se utilizan sistemas de transporte y diferenciación de frutos para su calibrado y distribución posterior que coinciden técnicamente con la mayoría de calibradores que pueden encontrarse en el mercado en la actualidad.
El sistema empleado consiste en un grupo de cintas, denominadas singuladoras, que forman un grupo de vías paralelas, estando dichas cintas dispuestas en grupos de dos, conformando una sección en V con un ángulo de aproximadamente 90°. En estas cintas singuladoras los frutos provenientes de la línea de tratamiento se transportan de uno en uno. Las dimensiones de este primer conjunto dependen del requerimiento de producción y del fabricante, pero su longitud se sitúa habitualmente en unos 5m.
Dispuesto a continuación de las cintas singuladoras descritas, existe un módulo denominado diferenciador que está sincronizado con las cintas singuladoras. Se trata de un conjunto de cadenas que soportan desde sus laterales unos biconos o bi-semiesferas (diávolos) y que están montados sobre respectivos ejes en grupos de a dos a lo largo de toda su longitud. Entre cada conjunto de dos diávolos está dispuesto un sistema de extracción del producto por lengüeta con resorte ó similar y que evacúa el producto lateralmente, en el hueco entre dos cadenas y realizado para tal fin.
Dichos diávolos imprimen una rotación al fruto situado sobre él. El fruto rueda entonces apoyado sobre su diámetro ecuatorial permitiendo su visión y lectura y evaluación cualitativa posterior. No obstante y debido a que el fruto gira sobre un eje horizontal es dificultosa su evaluación con una sola cámara, incluso con dos cámaras por carril no se obtiene una visión diferenciada del producto en el mínimo espacio dispuesto para la visión artificial.
Todo este conjunto de sistemas (cintas singuladoras y cadenas de diávolos) exige un gran espacio para su ubicación y una gran superficie para la distribución de los frutos procesados, además de sustituir las habituales instalaciones de calibrado por rodillos basculantes que funcionan correctamente pero no dan información individualizada del producto, por lo que no se puede desverdizar en precampaña ni separar el podrido de forma automática. Al mismo tiempo, la evaluación en parámetros de calidad que es lo que se prioriza para la inversión en este tipo de maquinaria, aún no consigue resultados como con la evaluación manual, por lo que hasta
que la tecnología de escaneado automático no mejore, las inversiones millonarias en calibradores electrónicos son de difícil amortización ya que necesitan una supervisión manual (llamada retría de repaso) antes de la entrada del producto a las zonas de confección (distribución, encajado).
DESCRIPCIÓN DE LA INVENCIÓN
La invención que se propone consiste en un selector automático para diagnosis cualitativa de frutos en fresco y su diferenciación y distribución en línea, que está formado por un conjunto de vías que comprenden dos ó más cadenas que arrastran unas semiesferas de caucho o material similar alimentario, que sostienen y entran en contacto directo con los frutos, que denominaremos en lo sucesivo "rodetes". Las semiesferas están montadas sobre las cadenas modulares enfrentadas entre sí, de forma que cada par de ellas y la siguiente o anterior pareja configuran un alojamiento que acuna cada fruto sosteniéndolo por cuatro puntos de apoyo, y que le transmiten a dicho fruto un movimiento desde cada uno de dichos puntos de apoyo, siendo estos apoyos del fruto en cada uno de los rodetes los que el sistema emplea para controlar la posición y rotación del mismo.
Hay que remarcar que cuando un fruto en forma esférica o de geoide es situado y transportado en una cadena de soporte como la descrita, tiende en su movimiento...
Reivindicaciones:
1.- Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos, integrable en una línea de tratamiento de centrales de procesado de cítricos y otros frutos, que comprende
unos elementos de transporte de los frutos siendo dichos elementos de transporte un conjunto de parejas de rodetes (1), montados sobre ejes paralelos que permiten su giro libre e independiente, en los que cada dos parejas de rodetes determinan un alojamiento para el fruto a transportar;
al menos una cadena de transporte (2) de los ejes portadores de los rodetes;
en la que los rodetes adoptan posiciones fijas y a distancias regulares sobre la cadena de transporte;
un dispositivo de iluminación (5) de los frutos a lo largo del recorrido de exhibición; y
un mecanismo de separación selectiva y evacuación de los frutos;
Caracterizada por comprender además
un conjunto de elementos de control que determinan el sentido de giro de cada uno de los rodetes así como su correspondiente velocidad, y consecuentemente del movimiento imprimido sobre los frutos desde dichos rodetes.
2.- Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos, según la reivindicación 1, caracterizada por que la superficie de los rodetes comprende unas zonas o pistas de accionamiento (11), y porque el bastidor comprende unas pistas de fricción (25, 27) montadas longitudinalmente, en las que se imprime a cada rodete el movimiento deseado, estando dispuestas las pistas de fricción en posiciones inferior (25) y superior (27) respecto al eje de los rodetes (1).
3.- Máquina automática para la inspección, detección y separación de frutos en fresco en su
valoración cualitativa relativa al podrido y defectos externos, según cualquiera de las
reivindicaciones 1 a 2, caracterizada por que los rodetes presentan forma de semiesferas o troncos de cono de sección variable
4.- Máquina automática para la inspección, detección y separación de frutos en fresco en su
valoración cualitativa relativa al podrido y defectos externos, según cualquiera de las
reivindicaciones 1 a 3, caracterizada por que los rodetes son de un material rugoso alimentario tal como caucho.
5.- Máquina automática para la inspección, detección y separación de frutos en fresco en su
valoración cualitativa relativa al podrido y defectos externos, según cualquiera de las
reivindicaciones 1 a 4, caracterizada por disponer de un sistema de visión artificial, provisto de
emisores de luz en distintas longitudes de onda, que escanea los frutos en movimiento en observación cenital y determina si el fruto ha de ser aceptado o rechazado, y porque comprende medios de identificación de la posición del fruto examinado.
6.- Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos, según cualquiera de las reivindicaciones anteriores, caracterizada por que comprende un mecanismo de separación de frutos en el cabezal anterior de la máquina, que comprende a su vez un conjunto elementos retenedores de giro concordante con el de los rodetes y que en su giro en el cabezal anterior de la máquina se sitúan en las zonas de los alojamientos de los frutos, de modo que un elemento retenedor se activa cuando el fruto que corresponde a su posición ha de ser rechazado, sujetando el fruto a rechazar hasta una posición de descarga de frutos rechazados, y que no se activa cuando el fruto ha de ser aceptado, permitiendo su caída por gravedad a una cinta de descarga.
7.- Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos, según la reivindicación 6, caracterizada porque los elementos retenedores se disponen en un conjunto distribuidor (43), correspondiendo cada elemento retenedor que presenta un doble perfil de leva que determina un doble recorrido, un primer recorrido circular interior, cuando el fruto es aceptado, y un perfil variable exterior, que activa una pinza de apriete (31) cuando el fruto es rechazado.
8.- Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos, según cualquiera de las reivindicaciones 6 a 7, caracterizada por que los elementos retenedores están formados por una guía de extracción (33) cuya posición radial de giro es fija, y por un cuerpo extraíble (34) portador de una pinza de apriete (31), cuya posición radial es variable, con una posición retraída en que no actúa, y una posición extendida de sujeción del fruto, en la que la pinza de apriete oprime desde fuera o lateralmente el fruto contra el alojamiento formado por los rodetes por efecto del muelle (32).
9- Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos, según la reivindicación 8, caracterizada por que la pinza de apriete (31) está provista en su extremo de una porción articulada tendente a quedar girada por efecto del muelle (32) respecto al cuerpo extraíble cuando dicha pinza de apriete está situada fuera de la guía de extracción (33), en posición activa, y obligada a quedar en posición alineada cuando dicho cuerpo extraíble está dentro de la guía de extracción, en posición pasiva.
10.- Máquina automática para la inspección, detección y separación de frutos en fresco en su
valoración cualitativa relativa al podrido y defectos externos, según cualquiera de las
reivindicaciones 7 a 9, caracterizada por que el cuerpo extraíble (34) de los elementos retenedores está provisto de un tetón (38) que constituye un elemento seguidor del perfil de leva del conjunto distribuidor (43), y que en función de la posición radial de dicho tetón en el perfil de leva determina el estado de extracción o retracción de la pinza de apriete (31).
11.- Máquina automática para la inspección, detección y separación de frutos en fresco en su
valoración cualitativa relativa al podrido y defectos externos, según cualquiera de las
reivindicaciones 7 a 10, caracterizada por que el perfil de leva comprende un circuito o recorrido interior y un circuito o recorrido exterior, disponiéndose una uña directora (54) actuada por un elemento electromecánico que adopta una posición cerrada, en que el tetón (38) del cuerpo extraíble recorre un circuito interior o inactivo sin desplazamiento radial, y una posición abierta, en que el tetón (38) del cuerpo extraíble es forzado a seguir el circuito exterior con desplazamiento radial y apertura de la pinza.
12.- Máquina automática para la inspección, detección y separación de frutos en fresco en su valoración cualitativa relativa al podrido y defectos externos, según la reivindicación 11,
caracterizada por que el conjunto distribuidor comprende un brazo inferior que define un tope de desplazamiento del tetón (38), y una ranura o surco de reentrada de los tetones (38) al circuito interior.
13.- Procedimiento de individualización, transporte y exhibición y selección de frutos, en la
máquina de la reivindicación 1, que comprende el transporte del fruto sobre alojamientos formados por parejas de rodetes (1), en el que se realizan tomas de imágenes desde una posición cenital, caracterizada porque en la fase de exhibición se produce el volteo del fruto para la exhibición total de la superficie por la variación y de velocidad de los rodetes que 10 sustentan el fruto y la inversión del sentido de giro de al menos uno de dichos rodetes.
14.- Procedimiento, según la reivindicación 13, caracterizado porque comprende la separación selectiva de los frutos que deben ser rechazados, en la que dicha separación se realiza por medio de la retención de dichos frutos en su alojamiento mediante pinzas de apriete durante 15 una porción del recorrido de salida, de modo que para los frutos seleccionados la sujeción del fruto mediante dichas pinzas de apriete impide la caída de los frutos por gravedad a una primera cinta de recogida, liberándose dicha sujeción al alcanzar la posición de una segunda cinta de recogida a la que caen por gravedad.
Patentes similares o relacionadas:
Aparato y método para envasar bolsitas, del 3 de Junio de 2020, de Universal Pack S.r.l: Aparato para el envasado de bolsitas que comprende: - una unidad de envasado primaria configurada para suministrar dichas bolsitas […]
Aparato y método para orientar el cierre de extremo de un recipiente de bebida y aplicación de símbolos en una ubicación predeterminada, del 29 de Abril de 2020, de BALL CORPORATION: Un método para orientar y decorar un cierre de extremo para un recipiente de bebida, que comprende: proporcionar el cierre de extremo que comprende un ribete […]
Aparato para recibir y transportar una corriente de huevos, del 22 de Abril de 2020, de Moba Group B.V: Aparato para recibir y transportar una corriente de huevos, que comprende, - una transportadora para transportar huevos (E) en una dirección de transporte T, […]
Aparato de transporte para una máquina de envasado de pasta alimenticia, productos granulares y similares, del 22 de Abril de 2020, de ALTOPACK S.P.A.: Aparato de transporte capaz de transportar horizontalmente una pluralidad de envases que contienen alimentos, que comprende una cadena de bucle cerrado que se […]
Aparatos de transporte, del 15 de Abril de 2020, de FUJI MACHINERY CO., LTD: Un aparato de transporte que comprende: una sección de soporte configurada para soportar una pluralidad de artículos (P) sobre la misma […]
Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance, del 1 de Abril de 2020, de MARCHESINI GROUP S.P.A.: Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance (A), teniendo los artículos que ser desplazados y empujados transversalmente, […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo de transporte y método de producción de artículos ponibles desechables mediante su uso, del 27 de Noviembre de 2019, de ZUIKO CORPORATION: Un dispositivo de transporte para transportar un objeto (A) a una superficie de una lámina (S1, S2), que comprende: un rodillo de entrega […]