Corrección de la no uniformidad de una respuesta en grupos de sensores.
Método para calcular parámetros de corrección comunes que comprenden un único factor de corrección común (M,
S) y/o un único desplazamiento de corrección común (O) para un juego de parámetros de corrección individuales, comprendiendo cada elemento de dicho juego de parámetros de corrección individuales un factor de escala de corrección individual (2pt) y/o un desplazamiento de corrección individual (1pt) para un elemento sensor en un conjunto de sensores que puede hacerse funcionar para capturar una imagen, comprendiendo el método el paso de determinar los parámetros de corrección comunes de manera que se minimicen las diferencias entre las salidas corregidas de elementos sensores adyacentes en el conjunto cuando cada uno de los parámetros de corrección comunes se aplica de la misma manera a cada elemento del juego de parámetros de corrección individuales antes de utilizar cada uno de éstos sucesivamente para corregir la salida de un elemento sensor, y determinándose los parámetros de corrección comunes de manera que se minimice una suma de los cuadrados de las diferencias entre las salidas corregidas de elementos sensores adyacentes sumadas bien para todo el conjunto de sensores o bien para una parte del mismo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2007/004962.
Solicitante: THERMOTEKNIX SYSTEMS LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: TEKNIX HOUSE 2 PEMBROKE AVENUE WATERBEACH, CAMBRIDGE CB25 9QR REINO UNIDO.
Inventor/es: CAIRNDUFF,BRUCE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01J5/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01J MEDIDA DE LA INTENSIDAD, DE LA VELOCIDAD, DEL ESPECTRO, DE LA POLARIZACION, DE LA FASE O DE CARACTERISTICAS DE IMPULSOS DE LA LUZ INFRARROJA, VISIBLE O ULTRAVIOLETA; COLORIMETRIA; PIROMETRIA DE RADIACIONES. › G01J 5/00 Pirometría de las radiaciones. › utilizando elementos resistentes, termorresistentes o semiconductores sensibles a las radiaciones.
- H04N5/33 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Transformación de radiación infrarroja.
- H04N5/365 H04N 5/00 […] › aplicado a un patrón fijo de ruido, p. ej. no uniformidad de la respuesta.
PDF original: ES-2508941_T3.pdf
Fragmento de la descripción:
Corrección de la no uniformidad de una respuesta en grupos de sensores
La presente invención se refiere a la corrección de la no uniformidad en la respuesta de diferentes elementos dentro de un grupo de sensores y en particular a su consecución en un grupo detector susceptible de capturar una imagen tal como una imagen infrarroja.
Las cámaras infrarrojas miden la radiación infrarroja (el calor) incidente sobre un conjunto detector. Normalmente, la radiación infrarroja alcanza el conjunto detector atravesando una lente, de modo que puede obtenerse una imagen de la intensidad de la radiación infrarroja emitida y/o reflejada por objetos en una escena. Las diferencias en la cantidad de radiación infrarroja producida/reflejada desde una posición concreta en la escena representada tienen como resultado diferencias en la salida de la parte pertinente del conjunto detector. A la inversa, el conjunto detector debería producir una respuesta uniforme cuando ve una escena que produce/refleja una cantidad uniforme de radiación.
Normalmente, el conjunto detector puede ser un microbolómetro. Un microbolómetro comprende una matriz (una parrilla) de píxeles, cada uno individualmente sensible a la radiación infrarroja. Cada píxel consiste en un "puente" aislado térmicamente y está compuesto de un material resistivo que se calienta con la radiación incidente. La resistencia del puente varía con su temperatura y esta variación en la resistencia se utiliza para generar una salida relacionada con la intensidad de la radiación incidente. En la práctica, estos conjuntos son propensos a una alta falta de uniformidad entre píxeles, es decir, cuando se exponen a la misma cantidad de radiación, cada píxel produce una respuesta diferente. En la salida bruta de tales conjuntos domina este efecto, por lo que ésta no es reconocible como imagen. Siendo así, las cámaras infrarrojas aplican una corrección a la salida bruta del conjunto.
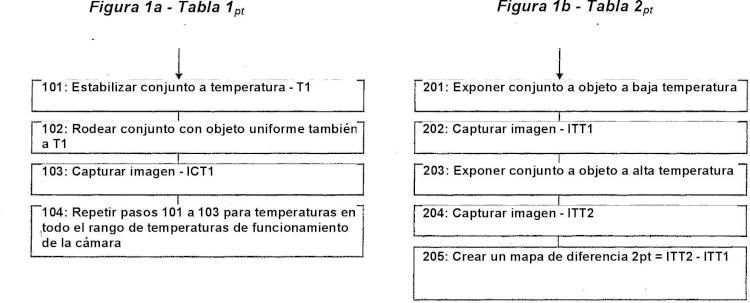
Una corrección ya conocida es generar una tabla de factores de corrección individuales a aplicar a las salidas de cada píxel en la imagen. Generalmente, la corrección utilizada prevé un desplazamiento constante (1 pt) y una corrección de ganancia lineal (2pt), almacenando la cámara tablas que contienen los factores 1 pt y 2pt a utilizar para corregir la salida de cada píxel individual en el conjunto. Así, para cada píxel, la cámara calcula una salida normalizada On a partir de una salida bruta OR de la forma:
N = 2pt*OR + lpt
Normalmente, la tabla 1 pt se crea (o se ajusta) imponiendo una paleta delante del sensor para crear una iluminación uniforme. En estas condiciones, la salida para cada píxel se resta de la salida producida cuando se ve la escena sin el bloque. La paleta puede ser un obturador, utilizándose el obturador periódicamente para bloquear la radiación incidente durante el uso. De este modo es posible actualizar regularmente la tabla 1 pt. Esta actualización regular es necesaria, ya que el desplazamiento tiende a derivar con el tiempo. La deriva es particularmente pronunciada cuando la cámara se utiliza inmediatamente después de encenderla, pero tiende a estabilizarse en gran medida cuando ha estado funcionando durante un largo periodo de tiempo y el conjunto se acerca al equilibrio. Normalmente puede ser necesario imponer el obturador segundo a segundo tras el encendido, pero, después de un funcionamiento prolongado, el intervalo entre las imposiciones del obturador puede ampliarse a un minuto más o menos antes de que se perciba una degradación importante de la imagen.
Sin embargo, este método tiene algunas desventajas, concretamente: oscurece la imagen durante un periodo de tiempo; como parte móvil, afecta a la fiabilidad especialmente en referencia a la vibración; aumenta la demanda de energía de la cámara (y lo que es más problemático, añade esta demanda adicional cuando la cámara está funcionando a una potencia máxima); y añade coste, peso y tamaño a la cámara.
La tabla 2pt se crea iluminando el conjunto con dos intensidades de radiación uniformes diferentes. Se determina la diferencia en las respuestas a las intensidades uniformes para cada píxel y se utiliza para calcular el valor 2pt para cada píxel. A diferencia de la tabla 1 pt, no se conoce ninguna manera fácil de crear esta tabla durante el funcionamiento de la cámara, por lo que normalmente se genera y almacena en forma de calibración semipermanente.
Cuando la temperatura del conjunto detector varía se provocan problemas adicionales, dado que los factores de corrección adecuados varían también con la temperatura. Una forma de resolver este problema es estabilizar el conjunto en la temperatura de calibrado. Normalmente, esto se logra empleando uno o más dispositivos Peltier. Aunque esto proporciona una solución razonablemente eficaz, la incorporación de uno o más dispositivos Peltier a la cámara aumenta su coste. Además, los dispositivos Peltier consumen una cantidad considerable de energía.
Una alternativa para estabilizar la temperatura del conjunto es caracterizar el rendimiento del conjunto a una o más temperaturas y luego utilizar sensores dedicados previstos en el conjunto, normalmente píxeles ciegos, termistores o similares, para medir su temperatura actual. A continuación puede realizarse una interpolación dependiente de la temperatura para estimar el ajuste adecuado en los factores de corrección. Debido a la sensibilidad extrema de los factores de corrección a la temperatura del conjunto, resulta difícil aplicar esta técnica de manera lo suficientemente precisa como para proporcionar una imagen clara.
Otro método alternativo para solucionar la no uniformidad aprovecha las propiedades de una imagen en movimiento, no siendo aplicable a una imagen estática. Éste se basa en el supuesto de que la radiación incidente media y la desviación estándar de la radiación incidente son esencialmente iguales en toda el área del conjunto durante un intervalo de tiempo suficiente. La corrección de desplazamiento puede entonces calcularse a partir del valor medio y la corrección de ganancia puede calcularse a partir del valor de la desviación estándar. Una variación de esta técnica somete la salida de un píxel a un cálculo de error medio cuadrático mínimo para reducir el efecto de la no uniformidad de desplazamiento.
En el documento EP1727359 se describe otro método alternativo para solucionar la no uniformidad. Este documento revela una técnica donde se gradúa una tabla de factores de corrección almacenada con un factor de escala adecuado y se utiliza para corregir los datos de salida brutos. El factor de escala para la tabla se determina mediante una técnica en la que se aplican a las tablas cierto número, normalmente tres, de factores de escala diferentes, antes de aplicar la tabla a los datos de salida brutos, generándose tres juegos de datos de salida corregidos. A continuación, se calcula el promedio de cada juego de datos de salida corregidos sobre una pluralidad de píxeles adyacentes para generar un juego de datos de salida corregidos promediados. Se determina y se suma la magnitud absoluta de las diferencias entre cada valor de píxel en cada juego de datos de salida corregidos y el juego de datos de salida corregidos promediados correspondiente. A continuación, el método selecciona el factor de escala que tiene como resultado la menor suma de diferencias entre los datos de salida de píxel corregidos y los corregidos promediados. Este proceso puede aplicarse de manera iterativa, determinándose los factores de escala aplicados posteriormente mediante la determinación del mejor factor de escala anterior. Este método busca una solución por estimación más que mediante el cálculo de un factor de escala óptimo. Adicionalmente, requiere el cálculo de una media variable de datos de salida corregidos y, como tal, requiere una gran carga de procesamiento y tiene como resultado una pérdida de detalle. Otro problema es que, con la comparación de una imagen corregida con una imagen corregida promediada, el método no determina directamente cómo solucionar la no uniformidad a partir de la propia imagen.
A continuación se discuten otros métodos alternativos para solucionar la no uniformidad que forman parte del estado actual de la técnica.
El documento US614448A se refiere a un método donde se generan dos parámetros de corrección individuales (un factor y un desplazamiento) para parámetros de corrección de punto individuales para elementos sensores de un conjunto. Éstos se generan con referencia a una toma en negro, que caracteriza el patrón ruido fijo del conjunto, considerando una suma de las salidas de elementos sensores cercanos y la suma total de todos los elementos sensores por encima de un umbral.
El... [Seguir leyendo]
Reivindicaciones:
1. Método para calcular parámetros de corrección comunes que comprenden un único factor de corrección común (M, S) y/o un único desplazamiento de corrección común (O) para un juego de parámetros de corrección individuales, comprendiendo cada elemento de dicho juego de parámetros de corrección 5 individuales un factor de escala de corrección individual (2pt) y/o un desplazamiento de corrección
individual (1 pt) para un elemento sensor en un conjunto de sensores que puede hacerse funcionar para capturar una imagen, comprendiendo el método el paso de determinar los parámetros de corrección comunes de manera que se minimicen las diferencias entre las salidas corregidas de elementos sensores adyacentes en el conjunto cuando cada uno de los parámetros de corrección comunes se
aplica de la misma manera a cada elemento del juego de parámetros de corrección individuales antes
de utilizar cada uno de éstos sucesivamente para corregir la salida de un elemento sensor, y determinándose los parámetros de corrección comunes de manera que se minimice una suma de los cuadrados de las diferencias entre las salidas corregidas de elementos sensores adyacentes sumadas bien para todo el conjunto de sensores o bien para una parte del mismo.
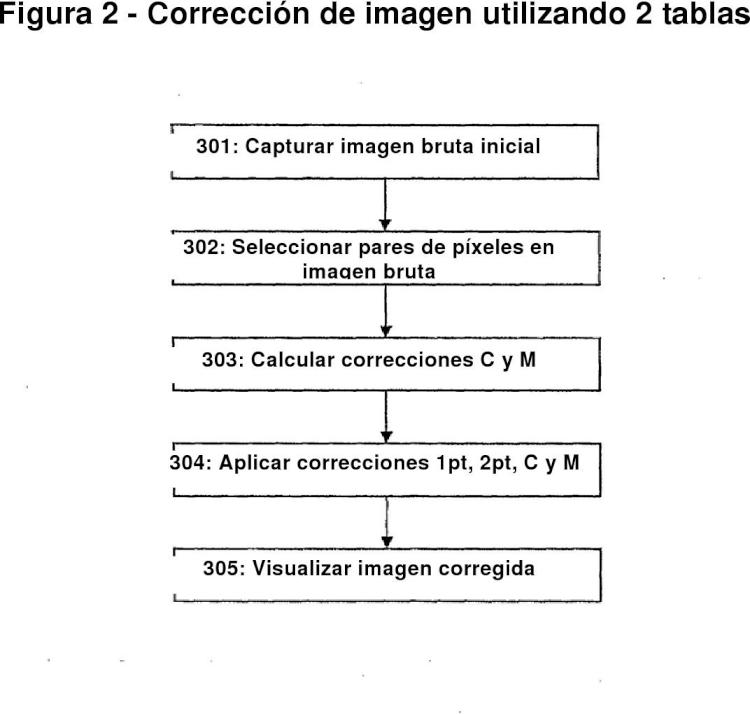
2. Método para corregir la salida de un conjunto de sensores que comprende: aplicar una corrección a
cada elemento del conjunto, comprendiendo la corrección parámetros de corrección comunes que se aplican de la misma manera a cada uno de un juego de parámetros de corrección individuales predeterminados antes de utilizar cada uno de los parámetros de corrección individuales sucesivamente para corregir la salida de un elemento sensor del conjunto, y calculándose los parámetros de corrección
comunes según el método de la reivindicación 1.
3. Método según cualquiera de las reivindicaciones anteriores, donde, en caso de que los parámetros de corrección comunes comprendan tanto un factor de corrección común (M, S) como un desplazamiento de corrección común (O), el factor de corrección común (M, S) y el desplazamiento de corrección común único (O) se calculan independientemente a partir del mismo mapa de salidas del conjunto mediante los
pasos siguientes: calcular el factor de corrección común (M, S) y, a continuación, los datos corregidos
empleando el factor de corrección común (M, S) se utilizan para calcular el desplazamiento de corrección común (O); o calcular el desplazamiento de corrección común (O) y, a continuación, los datos corregidos mediante el uso del desplazamiento de corrección común (O) se utilizan para calcular el factor de corrección común (M, S).
4. Método según cualquiera de las reivindicaciones anteriores, donde la suma de los cuadrados de las
diferencias en salida corregida de pares de elementos sensores adyacentes se calcula para una selección de pares de elementos sensores adyacentes concretos, estando la selección basada en la ubicación o en un umbral concreto, de manera que sólo se tienen en cuenta pares de elementos sensores adyacentes con las menores diferencias en la salida.
5. Método según la reivindicación 4, caracterizado porque el umbral es un valor prefijado o porque el
umbral varía para excluir una proporción concreta de pares de elementos sensores adyacentes.
6. Método según cualquiera de las reivindicaciones anteriores, caracterizado porque el juego de parámetros de corrección individuales almacenado comprende uno o más juegos de parámetros de desplazamiento calculados mediante la imposición de una entrada uniforme al conjunto de sensores,
donde, si hay dos o más juegos de parámetros de corrección individuales almacenados, éstos se
calculan a diferentes temperaturas del conjunto y donde las temperaturas elegidas abarcan esencialmente todo el intervalo de funcionamiento del conjunto de sensores.
7. Método según la reivindicación 6, que, en caso de funcionamiento a una temperatura que difiere de las temperaturas a las que se calculan los parámetros de corrección individuales almacenados, implica la
interpolación, de manera lineal o de otra manera, de un juego de parámetros de corrección individuales
almacenados, calculados a una primera temperatura, a la temperatura de funcionamiento.
8. Método según cualquiera de las reivindicaciones anteriores, caracterizado porque el método opera esencialmente de manera continua para optimizar los parámetros de corrección comunes empleando una salida de conjunto no corregida y/o una salida de conjunto corregida como base para calcular los
parámetros de corrección comunes para la aplicación a los parámetros de corrección individuales en
una corrección de salida de conjunto posterior.
9. Método según la reivindicación 8, caracterizado porque los parámetros de corrección comunes para la aplicación en una corrección subsiguiente se calculan en una sucesión de salidas anteriores, donde cada salida anterior considera bien las diferencias sumadas en el conjunto como un todo o bien las
diferencias sumadas en una sección concreta del conjunto y donde se utilizan diferentes secciones por
turnos hasta haber considerado toda la salida del conjunto en cierto número de ciclos de salida.
| Método según cualquiera de las reivindicaciones anteriores, caracterizado porque los parámetros de corrección individuales están adaptados de manera que el valor medio de los desplazamientos de corrección individuales (1 pt) en todo el conjunto, cuando se aplican los parámetros de corrección comunes, es esencialmente igual a cero. | |
| 11. | Método según cualquiera de las reivindicaciones anteriores, que implica calcular parámetros escalares para juegos alternativos de parámetros de corrección individuales calculados a diferentes temperaturas del conjunto según el método de la reivindicación 6 y a continuación seleccionar el mejor juego de parámetros de corrección individuales (y parámetro de corrección común) a utilizar para la corrección de la salida del conjunto. |
| 12. | Método según la reivindicación 11, caracterizado porque el mejor juego de parámetros de corrección individuales (y parámetro de corrección común) a utilizar se selecciona determinando qué juego de parámetros de corrección individuales (y parámetro de corrección común) tiene la menor suma del cuadrado de las diferencias entre pares de elementos sensores adyacentes. |
| 13. | Método según la reivindicación 12, caracterizado porque la suma de los cuadrados de las diferencias en la salida corregida de pares de elementos sensores adyacentes se calcula bien en todo el conjunto o bien en una selección de pares de elementos sensores adyacentes concretos y donde la selección está basada en la ubicación o en un umbral concreto para tener en cuenta sólo pares de elementos sensores adyacentes con las menores diferencias en la salida. |
| 14. | Método según una cualquiera de las reivindicaciones 12 a 14, caracterizado porque incluye un factor de histéresis en la determinación de si se ha de conmutar entre juegos de parámetros de corrección individuales. |
| Método según cualquiera de las reivindicaciones anteriores, que implica utilizar más de dos juegos de parámetros de corrección individuales, estando cada juego de parámetros de corrección provisto de parámetros de corrección comunes. | |
| 16. | Método según la reivindicación 15, caracterizado porque, en caso de que se seleccionen pares de elementos sensores adyacentes a partir de un umbral para calcular el parámetro de corrección común que minimizará la suma de los cuadrados de las diferencias en las salidas corregidas entre pares de elementos sensores adyacentes, los valores de las salidas de los pares de elementos sensores rechazados se sustituyen por los valores actuales respectivos de los parámetros de corrección |
| individuales con los parámetros de corrección comunes actuales aplicados, y donde durante el arranque inicial el umbral se mantiene arbitrariamente grande de manera que se incluyan en el cálculo todos los elementos sensores. | |
| 17. | Aparato que comprende un conjunto de sensores y una unidad de procesamiento conectada al mismo, donde la unidad de procesamiento puede operar de acuerdo con el método según cualquiera de las |
| reivindicaciones anteriores. | |
| 18. | Aparato según la reivindicación 17, caracterizado porque el conjunto es un conjunto de elementos detectores de radiación infrarroja. |
| 19. | Aparato según la reivindicación 17 o la reivindicación 18, caracterizado porque el conjunto de sensores está previsto en un único circuito integrado y porque la unidad de procesamiento está prevista en el |
| mismo circuito integrado que el conjunto detector o está prevista en un circuito integrado separado con respecto al conjunto detector. | |
| Aparato según cualquiera de las reivindicaciones 17 a 19, caracterizado porque la unidad de procesamiento es un procesador de señales digitales (DSP), un bloque de conjunto de puertas programable in situ (FPGA) o un circuito integrado de aplicación específica (ASIC) dedicado. | |
| 21. | Cámara infrarroja que comprende un conjunto de sensores y una unidad de procesamiento conectada al mismo según cualquiera de las reivindicaciones 17 a 2. |
| 22. | Radiómetro que comprende un conjunto de sensores y una unidad de procesamiento conectada al mismo según cualquiera de las reivindicaciones 17 a 2. |
Patentes similares o relacionadas:
Método y sistema para calibrar una cámara infrarroja, del 1 de Julio de 2020, de Tecnobit S.L: Un metodo para calibrar una camara infrarroja, el metodo comprende el paso de: - establecer un valor de tiempo de integracion para una […]
Procedimiento y aparato para la inspección u observación operativa de espacios peligrosos y adversos o espacios con condiciones ambientales hostiles, del 8 de Abril de 2020, de TENOVA S.P.A.: Un aparato para la inspección de un entorno hostil o adverso que comprende: - un dispositivo sensorizado que comprende a su vez una pluralidad de sensores de imagen […]
Sistema y método de detector IR, del 18 de Marzo de 2020, de LEONARDO MW LTD: Un método de reducción de artefactos de obtención de imágenes no deseados en un sistema de detector IR, comprendiendo el sistema de detector IR píxeles, […]
Procedimiento para el análisis de defectos de conexiones de cable, del 6 de Noviembre de 2019, de WiTrins s.r.o. (100.0%): Procedimiento para el análisis de defectos de una conexión de cable entre un sustrato y un componente semiconductor de un […]
Dispositivo de formación de imágenes con un rendimiento de enfoque automático mejorado, del 19 de Junio de 2019, de Lumileds Holding B.V: Un dispositivo de formación de imágenes que comprende un sensor de formación de imágenes para registrar datos de imágenes (D1) de una escena (SC), una lente de formación […]
Cámara de análisis de vídeo de resolución dual sacádica, del 8 de Mayo de 2019, de VIION Systems Inc: Dispositivo para detectar y seguir el movimiento de objetos de interés en una escena , comprendiendo el dispositivo: una cámara gran angular configurada […]
Método y sistema para referenciación geométrica de datos multiespectrales, del 6 de Marzo de 2019, de VITO NV: Un dispositivo de detección para obtener datos geométricos de imagen multiespectral referenciada de una región de interés en movimiento relativo con respecto al dispositivo […]
Sistema de formación de imagen de gran campo infrarrojo, del 5 de Diciembre de 2018, de Office National D'etudes Et De Recherches Aérospatiales (ONERA): Sistema de formación de imagen de gran campo para el ámbito espectral infrarrojo que comprende un recinto de vacío abierto ópticamente por […]