Sistemas y métodos para desviar objetos.
Sistema transportador (100) que comprende:
una cinta transportadora (102) que tiene una pluralidad de rodillos de cinta transportadora (118),
en el quelos rodillos de cinta transportadora tienen ejes de rotación que están alineados con un sentido de
desplazamiento (114) de la cinta transportadora de modo que los rodillos de cinta transportadora puedendesviar objetos en cualquier sentido transversal a través de la cinta transportadora; y
un mecanismo de accionamiento (106) que se engrana con los rodillos de cinta transportadora (118),estando configurado el mecanismo de accionamiento para accionar los rodillos de cinta transportadora,pudiendo ajustarse el mecanismo de accionamiento de modo que los rodillos de cinta transportadorapueden accionarse de manera selectiva en un primer sentido angular y un segundo sentido angular opuestode modo que los objetos pueden desviarse de manera selectiva a cualquier lado de la cinta transportadoraa un ángulo de desvío deseado,
caracterizado por que el mecanismo de accionamiento comprende una pluralidad de rodillos deaccionamiento ajustables de manera angular de giro libre (125) que se engranan con los rodillos de cintatransportadora y rotan sobre ejes de rotación, haciendo tal engranaje que los rodillos de cintatransportadora roten cuando los ejes de rotación de los rodillos de accionamiento no son perpendiculares aun sentido de desplazamiento de cinta.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/002192.
Solicitante: LAITRAM L.L.C..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 220 LAITRAM LANE HARAHAN, LOUISIANA 70123 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FOURNEY,MATTHEW,L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/46 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › con distribución, p. ej. automáticamente en los puntos deseados (en los sistemas de correo por tubos B65G 51/36).
PDF original: ES-2431845_T3.pdf
Fragmento de la descripción:
Sistemas y métodos para desviar objetos La invención se refiere a un sistema transportador y a un método para desviar objetos según el preámbulo de las reivindicaciones 1 y 12 respectivamente tal como se da a conocer en el documento US-B-6571937.
Antecedentes A menudo es necesario desviar objetos desde una cinta transportadora, por ejemplo hacia otra cinta transportadora, con el fin de encaminar o situar los objetos para su procesamiento de un tipo u otro.
Recientemente, se han desarrollado sistemas transportadores en los que la cinta transportadora comprende una pluralidad de pequeños rodillos en ángulo que se extienden más allá de las superficies superior e inferior de la cinta. Con tales sistemas, los objetos portados por la cinta transportadora, y más particularmente por los rodillos contenidos dentro de la cinta, pueden desviarse desde la cinta haciendo rotar los rodillos. Puede hacerse que los rodillos de cinta transportadora roten usando diversos métodos. En un método de este tipo, los rodillos se accionan haciendo de manera selectiva que una placa de fricción ubicada por debajo de la cinta transportadora se engrane con y desengrane de los rodillos. Cuando la placa se engrana con los rodillos, se hace que los rodillos roten en respuesta a las fuerzas de fricción entre la placa de fricción y los rodillos. En otro método, unos rodillos de giro libre ubicados por debajo de la cinta transportadora se engranan con y desengranan de manera selectiva de los rodillos de cinta transportadora, y la fricción entre los rodillos engranados provoca la rotación de ambos conjuntos de rodillos en sentidos opuestos.
Aunque los sistemas transportadores descritos anteriormente proporcionan ventajas significativas en relación con el desvío de objetos desde una cinta transportadora, todavía existen algunas limitaciones en su uso. Por ejemplo, como los ángulos de los rodillos de cinta transportadora son fijos, el desvío sólo puede realizarse hacia un lado de la cinta transportadora y a un ángulo de desvío fijo. Por tanto, si se desea cambiar el sentido o el ángulo de desvío, debe detenerse la línea transportadora y la cinta transportadora debe sustituirse por una cinta transportadora diferente que tiene rodillos dispuestos en una orientación diferente.
Una desventaja adicional se refiere al deslizamiento de rodillo. Específicamente, cuando una placa de fricción se pone en contacto con los rodillos, los rodillos deben acelerar desde una velocidad angular cero hasta una velocidad angular final proporcional a la velocidad a la que se desplaza la cinta transportadora. Dado que los rodillos no pueden acelerar instantáneamente hasta la velocidad angular final, se produce un deslizamiento de rodillo que provoca un desgaste de los rodillos. Puede producirse el mismo fenómeno, aunque en un menor grado, en realizaciones que emplean rodillos de giro libre para hacer rotar los rodillos de cinta transportadora. Específicamente, aunque la rotación de los rodillos de giro libre reduce el deslizamiento, todavía puede producirse un deslizamiento durante el periodo justo después de que se produzca el contacto entre rodillos.
Además, cuando la placa de fricción o los rodillos de giro libre se desengranan de los rodillos de cinta transportadora, los rodillos de cinta transportadora pueden rotar libremente, lo que puede permitir que los objetos presentes sobre la cinta transportadora se desplacen sin rumbo por la cinta. Aunque tal desplazamiento sin rumbo puede ser deseable en algunas situaciones, puede no ser deseable en situaciones en las que se desea controlar con precisión la posición lateral de un objeto sobre la cinta transportadora. La invención se describe mediante un sistema transportador según se indica en la reivindicación 1 y un método para desviar objetos según se indica en la reivindicación 12.
Breve descripción de los dibujos Los sistemas y métodos dados a conocer pueden entenderse con referencia a los siguientes dibujos. Los componentes en los dibujos no están necesariamente a escala.
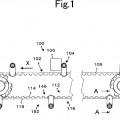
La figura 1 es una vista en perspectiva desde arriba de una primera realización de una parte de un sistema transportador.
La figura 2A es una vista en perspectiva desde arriba de un módulo de rodillo de accionamiento usado en el sistema transportador de la figura 1.
La figura 2B es una vista en perspectiva desde abajo de un módulo de rodillo de accionamiento usado en el sistema transportador de la figura 1.
La figura 3 es una vista en perspectiva desde arriba de una parte adicional del sistema transportador de la figura 1.
La figura 4 es una vista en perspectiva desde abajo de una pluralidad de módulos de rodillos de accionamiento usados en el sistema transportador de la figura 1.
La figura 5A es una vista de la parte de sistema transportador mostrada en la figura 3, que ilustra la acción de desvío en un primer sentido.
La figura 5B es una vista de la parte de sistema transportador mostrada en la figura 3, que ilustra la acción de desvío en un segundo sentido.
La figura 6A es una vista desde arriba de un módulo de rodillo de accionamiento, que ilustra el pivotamiento del módulo en un primer sentido angular.
La figura 6B es una vista desde arriba de un módulo de rodillo de accionamiento, que ilustra el pivotamiento del módulo en un segundo sentido angular.
La figura 7 es una vista de extremo de una parte del sistema transportador de la figura 1, que ilustra una función de frenado proporcionada por los rodillos de accionamiento ajustables de manera angular del sistema.
La figura 8A es un extremo de una parte del sistema transportador de la figura 1, que ilustra el engranaje de los rodillos de accionamiento ajustables de manera angular y los rodillos de accionamiento de cinta transportadora.
La figura 8B es un extremo de una parte del sistema transportador de la figura 1, que ilustra el desengranaje de los rodillos de accionamiento ajustables de manera angular y los rodillos de accionamiento de cinta transportadora.
La figura 9 es una vista en perspectiva desde arriba de una segunda realización de una parte de un sistema transportador.
Las figuras 10A-10C son vistas desde arriba del sistema transportador de la figura 9, que ilustran el ajuste angular de los rodillos de accionamiento del sistema para ajustar el ángulo de desvío.
Las figuras 11A y 11B son vistas en perspectiva de una realización de un mecanismo que puede usarse para ajustar la angulación de los rodillos de accionamiento del sistema transportador de la figura 9.
La figura 12 es una vista detallada de una realización de juntas que soportan los extremos de los rodillos de accionamiento en el sistema transportador de la figura 9.
Descripción detallada Tal como se describió anteriormente, los sistemas transportadores existentes que incluyen rodillos de cinta transportadora, a pesar de que proporcionan ventajas con respecto a los sistemas anteriores, todavía tienen limitaciones. Sin embargo, tal como se describe a continuación, tales limitaciones pueden superarse con un sistema transportador que emplea un mecanismo de accionamiento que comprende rodillos ajustables de manera angular de giro libre que controlan la rotación de los rodillos contenidos dentro de una cinta transportadora. En algunas realizaciones, una cinta transportadora comprende una pluralidad de rodillos de giro libre orientados longitudinalmente que se “accionan” mediante el contacto con rodillos ajustables de manera angular de giro libre que se sitúan por debajo de la cinta transportadora. En tales sistemas, los objetos pueden desviarse a diversos ángulos a cualquier lado de la cinta transportadora mediante la simple actuación de los rodillos ajustables de manera angular. Además, cuando los rodillos ajustables de manera angular se alinean con el sentido de desplazamiento de cinta, los rodillos de cinta transportadora pueden frenarse de modo que no rotarán, reduciendo o eliminando de este modo el desplazamiento sin rumbo del objeto. Además, dado que los rodillos ajustables de manera angular pueden hacerse rotar progresivamente desde la orientación de frenado a un ángulo de desvío deseado, los rodillos de cinta transportadora pueden acelerarse progresivamente, reduciendo o eliminando de este modo el deslizamiento.
Con referencia a las figuras, en las que los números de referencia similares indican partes correspondientes en todas las vistas diferentes, la figura 1 ilustra una realización de una parte de un sistema transportador 100 que puede ajustarse para desviar objetos a diversos ángulos a cualquier lado del sistema. Tal como se indica en la figura 1, el sistema transportador 100 comprende una cinta transportadora 102 y un campo 104... [Seguir leyendo]
Reivindicaciones:
1. Sistema transportador (100) que comprende:
una cinta transportadora (102) que tiene una pluralidad de rodillos de cinta transportadora (118) , en el que los rodillos de cinta transportadora tienen ejes de rotación que están alineados con un sentido de 5 desplazamiento (114) de la cinta transportadora de modo que los rodillos de cinta transportadora pueden desviar objetos en cualquier sentido transversal a través de la cinta transportadora; y
un mecanismo de accionamiento (106) que se engrana con los rodillos de cinta transportadora (118) , estando configurado el mecanismo de accionamiento para accionar los rodillos de cinta transportadora, pudiendo ajustarse el mecanismo de accionamiento de modo que los rodillos de cinta transportadora pueden accionarse de manera selectiva en un primer sentido angular y un segundo sentido angular opuesto de modo que los objetos pueden desviarse de manera selectiva a cualquier lado de la cinta transportadora a un ángulo de desvío deseado,
caracterizado por que el mecanismo de accionamiento comprende una pluralidad de rodillos de accionamiento ajustables de manera angular de giro libre (125) que se engranan con los rodillos de cinta transportadora y rotan sobre ejes de rotación, haciendo tal engranaje que los rodillos de cinta transportadora roten cuando los ejes de rotación de los rodillos de accionamiento no son perpendiculares a un sentido de desplazamiento de cinta.
2. Sistema según la reivindicación 1, en el que los rodillos de cinta transportadora (118) se alargan en un sentido de sus ejes de rotación.
3. Sistema según la reivindicación 1, en el que los rodillos de accionamiento ajustables de manera angular
(125) pueden ajustarse desde una orientación en la que los ejes de rotación de los rodillos de accionamiento son perpendiculares al sentido de desplazamiento de cinta a orientaciones en las que sus ejes de rotación no son perpendiculares al sentido de desplazamiento de cinta.
4. Sistema según la reivindicación 3, en el que el ángulo de desvío puede extenderse desde aproximadamente -90 grados hasta aproximadamente 90 grados en relación con el sentido de desplazamiento de cinta.
5. Sistema según la reivindicación 1, en el que los rodillos de accionamiento ajustables de manera angular
(125) pueden engranarse con y desengranarse de manera selectiva de los rodillos de cinta transportadora (118) .
(125) comprenden ruedas pivotantes relativamente cortas.
7. Sistema según la reivindicación 6, en el que al menos dos rodillos de accionamiento ajustables de manera angular (125) están situados adyacentes a un rodillo de cinta transportadora durante la operación de transporte.
(125) están alineados en filas transversales al sentido de desplazamiento de cinta y columnas alineadas con el sentido de desplazamiento de cinta.
9. Sistema según la reivindicación 6, en el que al menos algunos de los rodillos de accionamiento ajustables de manera angular (125) pueden activarse independientemente de modo que una orientación angular de al 40 menos algunos de los rodillos de accionamiento puede controlarse independientemente.
10. Sistema según la reivindicación 6, en el que al menos algunos de los rodillos de accionamiento ajustables de manera angular (125) pueden activarse conjuntamente en grupos de modo que una orientación angular de al menos algunos de los rodillos de accionamiento puede controlarse de manera sincronizada.
11. Sistema según la reivindicación 1, en el que los rodillos de accionamiento ajustables de manera angular
(125) se alargan en un sentido de sus ejes de rotación y se soportan mediante un bastidor (126) , pudiendo ajustarse una orientación del bastidor, y en el que cuando se ajusta la orientación del bastidor, las orientaciones de los rodillos de accionamiento se ajustan de manera sincronizada.
12. Método para desviar objetos, comprendiendo el método:
soportar los objetos sobre una cinta transportadora (102) que incluye una pluralidad de rodillos de cinta 50 transportadora de giro libre (118) , estando el método caracterizado por que comprende:
engranar los rodillos de cinta transportadora (118) con rodillos de accionamiento ajustables de manera angular de giro libre (125) que rotan sobre un eje de rotación; haciendo que los rodillos de cinta transportadora roten cuando los ejes de rotación de los rodillos de accionamiento no son perpendiculares a un sentido de desplazamiento de cinta; y
ajustar una orientación angular de los rodillos de accionamiento en relación con un sentido de desplazamiento de cinta para ajustar un ángulo de desvío de la cinta transportadora.
13. Método según la reivindicación 12, que comprende además ajustar la orientación angular de los rodillos de accionamiento de modo que sus ejes de rotación son perpendiculares al sentido de desplazamiento de cinta transportadora para frenar los rodillos de cinta transportadora.
Patentes similares o relacionadas:
 Sistema de transferencia y sistema de manejo de materiales, y método para usar dicho sistema de transferencia, del 29 de Julio de 2020, de DEMATIC CORP.: Un sistema de manejo de materiales (también llamado 'sistema de gestión de materiales' o 'sistema de manipulación de materiales'), que comprende:
[…]
Sistema de transferencia y sistema de manejo de materiales, y método para usar dicho sistema de transferencia, del 29 de Julio de 2020, de DEMATIC CORP.: Un sistema de manejo de materiales (también llamado 'sistema de gestión de materiales' o 'sistema de manipulación de materiales'), que comprende:
[…]
Sistema de control para controlar la alimentación de combustible sólido en un proceso de combustión, del 27 de Mayo de 2020, de Inray Oy: Un sistema de control para controlar la alimentación de un biocombustible sólido en un proceso de combustión, que comprende una unidad de control […]
Sistemas transportadores para desviar objetos, del 19 de Febrero de 2020, de LAITRAM L.L.C.: Un sistema transportador que comprende: una cinta transportadora que incorpora una pluralidad de rodillos de cinta transportadora configurados […]
Transmisión de clasificador distribuida que usa electro-adhesión, del 3 de Julio de 2019, de DEMATIC CORP.: Un clasificador , que comprende una pluralidad de miembros de desplazamiento interconectados que se desplazan a lo largo de una ruta; miembros de […]
Conjunto de transportador de combinación, del 6 de Marzo de 2019, de DEMATIC CORP.: Un conjunto de transportador, comprendiendo dicho conjunto de transportador : un transportador principal que comprende un cinta transportadora que tiene […]
 Sistema de evacuación y procedimiento para evacuar recipientes de bebidas de un equipo de transporte que se mueve, del 9 de Marzo de 2016, de KRONES AKTIENGESELLSCHAFT: Sistema de evacuación, que comprende
- varios carriles de evacuación para recipientes de bebidas ,
- un dispositivo para […]
Sistema de evacuación y procedimiento para evacuar recipientes de bebidas de un equipo de transporte que se mueve, del 9 de Marzo de 2016, de KRONES AKTIENGESELLSCHAFT: Sistema de evacuación, que comprende
- varios carriles de evacuación para recipientes de bebidas ,
- un dispositivo para […]
Cintas transportadoras que tienen rodillos que desplazan objetos, del 15 de Abril de 2015, de LAITRAM L.L.C.: Cinta transportadora que comprende: múltiples conjuntos de rodillos a través de la anchura de la cinta, incluyendo cada 5 conjunto de rodillos […]
 Cinta transportadora de artículos y dispositivo de clasificación de monedas, del 30 de Julio de 2014, de ASAHI SEIKO CO. LTD.: Una cinta transportadora de artículos en la que un artículo es empujado por unos empujadores proporcionados de manera […]
Cinta transportadora de artículos y dispositivo de clasificación de monedas, del 30 de Julio de 2014, de ASAHI SEIKO CO. LTD.: Una cinta transportadora de artículos en la que un artículo es empujado por unos empujadores proporcionados de manera […]