Sistema y método para ubicar un dispositivo del GPS.
Un sistema para localizar una antena (3) del GPS, que comprende:
- la antena (3) del GPS, y
- un dispositivo (5) del GPS con el cual está conectada la antena (3) del GPS;comprendiendo el dispositivo (5) del GPS un medio adaptado para determinar datos (2) de posición para el satélite(1) del GPS y para medir distancias (6) entre los satélites (1) del GPS y la antena (3) del GPS;
caracterizado:
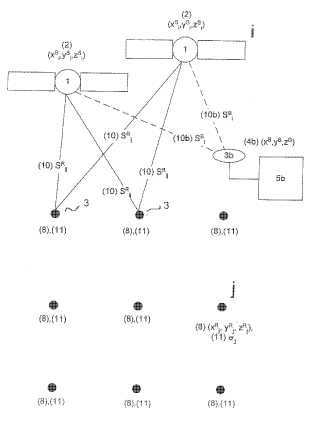
porque el dispositivo (5) del GPS comprende adicionalmente un medio adaptado para guardar una pluralidad deubicaciones (8) alternativas previamente conocidas, y un medio adaptado para seleccionar una ubicación correctade la antena (3) del GPS entre la pluralidad de ubicaciones (8) alternativas previamente conocidas, yporque para realizar dicha selección, el dispositivo (5) del GPS comprende adicionalmente un medio adaptado paradeterminar distancias teóricas (10) entre los satélites (1) del GPS y las ubicaciones alternativas (8), en base a datos(2) de posición de los satélites (1) del GPS, así como datos de posición de las ubicaciones alternativas (8), y unmedio adaptado para comparar las distancias teóricas (10) calculadas con las distancias (6) medidas por eldispositivo (5) del GPS entre los satélites (1) del GPS y la antena (3) del GPS.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2007/050258.
Solicitante: Konecranes Finland Oy.
Nacionalidad solicitante: Finlandia.
Dirección: KONEENKATU 8 05830 HYVINKÄÄ FINLANDIA.
Inventor/es: RINTANEN, KARI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C19/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › Grúas que llevan carros de rodadura que se desplazan sobre puentes o pórticos fijos o móviles (B66C 17/00 tiene prioridad; estructura de columnas que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00; grúas de brazo horizontal de carga B66C 23/00).
- B66F9/00 B66 […] › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C).
- G01S19/41 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Corrección diferencial, p. ej. DGPS [GPS diferencial].
- G01S19/50 G01S 19/00 […] › donde la solución de posición está restringida a encontrarse en una curva o superficie particular, p. ej. locomotora sobre unos raíles.
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
PDF original: ES-2409719_T3.pdf
Fragmento de la descripción:
Sistema y método para ubicar un dispositivo del GPS
Un objetivo en la tecnología tradicional del GPS y, en particular, con un dispositivo (5) de localización del GPS, es determinar la ubicación de una antena (3) del GPS en un espacio tridimensional. Una hipótesis aquí es que la antena (3) del GPS puede tener una ubicación arbitraria en el espacio.
El documento US 2002/145557 usa series temporales registradas de señales x (t) del GPS ‘en bruto’ convertidas para determinar la ubicación (figura 1, capítulo [0034]) . Las ‘ubicaciones candidatas” son usadas como una herramienta matemática para formar, p. ej., una rejilla de división [0054], que puede ser luego refinada recursivamente “... para mejorar la precisión de la ubicación estimada del receptor del GPS” [0055]. Con más detalle, la señal del GPS de tiempo continuo es medida y, usando un convertidor A / D (convertidor de Analógico a Digital) que toma muestras de esa señal (x (t) , capítulo [0035]) , convirtiéndola de ese modo en una serie temporal de muestras x1...xK (figura 1) . Esta serie temporal es luego comparada con la serie temporal teórica calculada, p. ej., mediante el uso de las ecuaciones (5) , capítulo [0108] o (6) , capítulo [0112].
El documento (GB 2.382.482 A) describe un algoritmo donde, esencialmente, las seudodistancias medidas son corregidas (es decir, modificadas) iterativamente para proyectar mejor las coordenadas de posición del GPS tradicionalmente calculadas (trianguladas) sobre un segmento de carretera. En resumen: primero se calcula una posición triangulada del GPS, luego se seleccionan segmentos de carretera dentro de una distancia predefinida de la posición calculada del GPS, y se proyecta la posición perpendicularmente a cada segmento de carretera y, finalmente, se calcula una modificación de las seudodistancias (y se aplica durante la próxima triangularización) .
Los segmentos de carretera, para los cuales la distancia viajada y / o el rumbo se desvían significativamente de los otros segmentos de carretera, son descartados.
La presente invención introduce un método que permite un uso mejor que el anterior de la ubicación del GPS y de un dispositivo (5) de ubicación del GPS, cuando el objetivo es seleccionar la ubicación de una antena (3) del GPS entre una pluralidad de ubicaciones (8) alternativas previamente conocidas. Una hipótesis aquí es que la antena (3) del GPS no puede ser ubicada en una posición arbitraria en el espacio, sino solamente en la vecindad de una de las ubicaciones (8) predeterminadas.
Un sistema de la invención puede ser usado especialmente en puertos de contenedores, terminales de contenedores, aparcamientos, patios de almacenamiento, o en cualquier aplicación en la cual diversos tipos de carga general, por ejemplo, contenedores (12) , palés, coches de pasajeros o piezas mezcladas de carga, son manipuladas y almacenadas en ubicaciones de almacenamiento predeterminadas, tal como, por ejemplo, en aparcamientos (15) de contenedores, ubicaciones de almacenamiento para palés o plazas de aparcamiento.
Cuando el objetivo es seleccionar la ubicación de una antena (3) del GPS entre una pluralidad de alternativas (8) previamente conocidas, el método tradicionalmente aplicado (figura 2A) procede de la siguiente manera: en la etapa A, un receptor (5) del GPS determina ubicaciones (2) para satélites (1) y mide datos (6) de distancias entre los satélites (1) y una antena (3) del GPS (figura 1) . El número de satélites recibidos por el receptor (5) del GPS es habitualmente 5...10, y generalmente el número máximo es 12, debido a limitaciones del hardware.
Describiremos ahora los datos (6) de distancia, en la medida necesaria para explicar la invención. Como es previamente conocido por un experto en la técnica, los datos (6) de distancia vienen en dos tipos; una seudodistancia calculada a partir de la medición del tiempo de tránsito de una señal de radio y una distancia Doppler acumulada, calculada acumulativamente a partir de una medición de fase de onda portadora. Además, los receptores (5) de alta calidad del GPS miden ambos conjuntos de datos de medición en dos frecuencias distintas (L1 = 1.575, 42 MHz y L2 = 1.227, 60 MHz) , comprendiendo efectivamente los datos (6) de distancia, en cada instante del tiempo, cuatro elementos de datos para cada satélite (1) .
La medición del tiempo de tránsito para una seudodistancia procede según el siguiente principio: un satélite (1) del GPS transmite un mensaje de radio a intervalos regulares. Tras transmitir un mensaje, el satélite (1) comprueba el instante de la hora de transmisión según su propio reloj y adosa esta información al mensaje. Tras recibir un mensaje de radio, el receptor (5) del GPS comprueba el instante de la hora de recepción según su propio reloj. Finalmente, el receptor (5) del GPS calcula una diferencia entre el instante de la hora de recepción y el instante de la hora de transmisión leída en el mensaje, y es por ello capaz de calcular un denominado tiempo de (seudo) tránsito aparente. En última instancia, el tiempo de tránsito es convertido en una (seudo) distancia usando la velocidad de la luz como una velocidad supuesta de viaje de la señal de radio.
La medición para una distancia Doppler acumulada procede según el siguiente principio: un receptor (5) del GPS mide una onda portadora de señales del GPS, en cuanto a su fase (L1 o L2) . Cuando la fase aumenta en un ciclo (360 grados) , el receptor sabe que la distancia entre un satélite (1) y una antena (3) del GPS ha aumentado en un ciclo de la longitud de onda portadora (ciclo de L1 = 19, 0 cm, ciclo de L2 = 24, 4 cm) . El receptor (5) del GPS monitoriza un cambio acumulativo de fase y, por ello, conoce exactamente el cambio de distancia.
En la práctica, se efectúa a menudo un cálculo de posición usando una combinación de datos de distancia obtenidos a partir de una seudodistancia y una distancia Doppler. Esto es porque la seudodistancia es una medición comparativamente ruidosa (decenas de centímetros) , mientras que el ruido de una distancia Doppler es muy leve (milímetros) . Sin embargo, el problema más difícil con una distancia Doppler es el hecho de que, aunque los cambios de estos datos de distancia, de un instante en el tiempo al siguiente, son extremadamente precisos, la medición incluye una constante desconocida, el valor inicial de una distancia Doppler. Por este motivo, como es obvio para los expertos en la técnica, es una práctica común combinar una seudodistancia y una distancia Doppler, de modo que los cambios en la distancia Doppler operen para filtrar una medición ruidosa de seudodistancia (allanamiento de fase de portadora) .
Los datos (6) de distancia son posteriormente usados con referencia a cualquier elemento de información de distancia, que se obtenga como se ha descrito anteriormente, y que representa la distancia entre un satélite dado (1) y una antena (3) del GPS.
También describiremos en lo siguiente los factores de error sistemático relevantes a los datos (6) de distancia, en la medida necesaria para explicar la invención. Tanto la medición de seudodistancia como la medición de distancia Doppler incluyen un error de igual magnitud, resultante del error de marcha de un reloj del receptor (5) del GPS. Además, el error es igual para cada satélite, dado que la cuestión es acerca de un error causado por el receptor (5) . Además, la atmósfera inflige error en mediciones de distancia, ya que la señal de radio no viaja en la atmósfera a la velocidad exacta de la luz. Como se sabe, un error que ocurre en la troposfera tiene el mismo efecto para la medición de una seudodistancia y de una distancia Doppler. Por otra parte, un error que ocurre en la ionosfera es igual, pero de dirección opuesta, en las mediciones de una seudodistancia y una distancia Doppler. Los errores infligidos por la atmósfera son distintos para satélites distintos, siendo distinta la distancia recorrida por una señal de radio en la atmósfera.
Además, hay un error incluido en una determinación (2) de la información de posición para los satélites (1) . El satélite (1) está, en realidad, situado en una posición (2’) , que es distinta a la posición (2) medida. Y por último, hay error de marcha también en el reloj del satélite. En términos de mediciones, sin embargo, este error del reloj del satélite parece ser exactamente el mismo que el error de posición del satélite, por lo que estos dos errores son usualmente procesados de manera conjunta.
En la Etapa B (figura 2A) , los datos (2) de posición para los satélites (1) , así como las mediciones (6) de distancia entre los satélites (1) y una antena (3) del GPS, son usados para calcular los... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para localizar una antena (3) del GPS, que comprende:
- la antena (3) del GPS, y
- un dispositivo (5) del GPS con el cual está conectada la antena (3) del GPS;
comprendiendo el dispositivo (5) del GPS un medio adaptado para determinar datos (2) de posición para el satélite (1) del GPS y para medir distancias (6) entre los satélites (1) del GPS y la antena (3) del GPS;
caracterizado:
porque el dispositivo (5) del GPS comprende adicionalmente un medio adaptado para guardar una pluralidad de ubicaciones (8) alternativas previamente conocidas, y un medio adaptado para seleccionar una ubicación correcta de la antena (3) del GPS entre la pluralidad de ubicaciones (8) alternativas previamente conocidas, y
porque para realizar dicha selección, el dispositivo (5) del GPS comprende adicionalmente un medio adaptado para determinar distancias teóricas (10) entre los satélites (1) del GPS y las ubicaciones alternativas (8) , en base a datos (2) de posición de los satélites (1) del GPS, así como datos de posición de las ubicaciones alternativas (8) , y un medio adaptado para comparar las distancias teóricas (10) calculadas con las distancias (6) medidas por el dispositivo (5) del GPS entre los satélites (1) del GPS y la antena (3) del GPS.
2. Un sistema según lo expuesto en la reivindicación 1, que, para una fiabilidad mejorada, hace uso de una segunda antena (3b) del GPS montada de manera fija, que está colocada en una ubicación fija conocida de antemano, y un segundo dispositivo (5b) del GPS que transmite mediciones (6b) de distancia entre los satélites (1) del GPS y la segunda antena (3b) del GPS, y datos (4b) de ubicación para la segunda antena (3b) del GPS al dispositivo (5) del GPS, caracterizado porque, a fin de seleccionar la ubicación correcta de la antena (3) del GPS, el dispositivo (5) del GPS comprende adicionalmente un medio adaptado para calcular distancias teóricas (10b) entre los satélites (1) del GPS y la segunda antena (3b) del GPS, en base a datos (2) de posición de los satélites (1) del GPS, así como datos (4b) de ubicación de la segunda antena (3b) del GPS, un medio adaptado para comparar las distancias teóricas (10 y 10b) con las distancias medidas (6 y 6b) para comprobar la coherencia, y un medio adaptado para construir datos diferenciados dobles para distancias teóricas y para distancias medidas.
3. Un sistema según lo expuesto en la reivindicación 2, caracterizado porque, a fin de seleccionar la ubicación correcta de la antena (3) del GPS, el dispositivo (5) del GPS compara las distancias teóricas (10 y 10b) calculadas con las distancias medidas por el dispositivo del GPS entre los satélites (1) del GPS y la antena (3) del GPS, y entre los satélites (1) del GPS y la segunda antena (3b) del GPS.
4. Un sistema según lo expuesto en cualquiera de las reivindicaciones precedentes, caracterizado porque la antena
(3) del GPS está montada en un vehículo que transporta contenedores u otra carga general.
5. Un método por el cual es seleccionada una ubicación correcta de una antena (3) del GPS conectada con un dispositivo (5) del GPS, entre una pluralidad de ubicaciones alternativas (8) previamente conocidas, que comprende determinar datos (2) de posición para los satélites (1) del GPS y medir distancias (6) entre los satélites (1) del GPS y la antena (3) del GPS, caracterizado porque la pluralidad de ubicaciones alternativas (8) previamente conocidas son guardadas en un medio para resguardos, proporcionado en el dispositivo (5) del GPS, y a fin de seleccionar la ubicación correcta de la antena (3) ; las distancias teóricas (10) entre los satélites (1) del GPS y las ubicaciones alternativas (8) guardadas son determinadas en base a datos (2) de posición de los satélites (1) del GPS, así como datos de posición de las ubicaciones alternativas (8) guardadas, y las distancias teóricas (10) calculadas son comparadas con las distancias (6) medidas por el dispositivo (5) del GPS, entre los satélites (1) del GPS y la antena (3) del GPS.
6. Un método según lo expuesto en la reivindicación 5, que comprende, para una fiabilidad mejorada, el uso también de una segunda antena (3b) del GPS, montada de forma fija, que está colocada en una ubicación fija conocida de antemano, y un segundo dispositivo (5b) del GPS, que transmite mediciones (6b) de distancias entre los satélites (1) del GPS y la segunda antena (3b) del GPS, y datos (4b) de ubicación para la segunda antena (3b) del GPS al dispositivo (5) del GPS, caracterizado porque, a fin de seleccionar la ubicación correcta de la antena (3) del GPS, el método comprende adicionalmente las etapas de calcular distancias teóricas (10b) entre los satélites (1) del GPS y la segunda antena (3b) del GPS, en base a datos (2) de posición de los satélites (1) del GPS, así como los datos (4b) de ubicación de la segunda antena (3b) del GPS, comparar las distancias teóricas (10 y 10b) con las distancias medidas (6 y 6b) para comprobar la coherencia, y construir datos diferenciados dobles para las distancias teóricas y para las distancias medidas.
7. Un método según lo expuesto en la reivindicación 6, caracterizado porque, a fin de seleccionar la ubicación correcta de la antena (3) del GPS, las distancias teóricas (10 y 10b) calculadas son comparadas con las distancias
medidas por el dispositivo del GPS, entre los satélites (1) del GPS y la antena (3) del GPS, y entre los satélites (1) del GPS y la segunda antena (3b) del GPS.
8. Un método según lo expuesto en cualquiera de las reivindicaciones precedentes 5 a 9, caracterizado porque el método es usado para una correcta identificación de espacios de almacenamiento para contenedores u otra carga general.
9. Un método según lo expuesto en la reivindicación 8, caracterizado porque el método es operado montando la antena (3) del GPS sobre un vehículo que transporta contenedores u otra carga general.
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]
Formato de trama de difusión de tiempo de salida (TOD), del 4 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento de medición de alcance entre una o más estaciones inalámbricas, STA, y un primer punto de acceso, AP, el procedimiento que comprende: […]
SISTEMA DE AJUSTE FINO PARA LOCALIZACIÓN Y DEFINICIÓN DE OBJETOS MEDIANTE UNA DISPOSICIÓN DE ANTENAS RFID, del 12 de Febrero de 2020, de GUTIÉRREZ GONZÁLEZ, Noel: 1. Sistema de ajuste fino para la localización y definición de objetos mediante una disposición de antenas RFID, y donde dichos objetos pueden estar parados o […]
Sistema y método para proporcionar servicios basados en ubicación a bordo de una aeronave, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Sistema para proporcionar servicios basados en ubicación a bordo de una aeronave para usuarios que tienen dispositivos […]
 Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Medición de temporización fina segura, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un aparato para proporcionar un intercambio de medición de temporización fina, FTM, segura que comprende: medios para obtener un valor de token seguro inicial y […]