Sistema para determinar la posición de un motor en dispositivo biomédico.
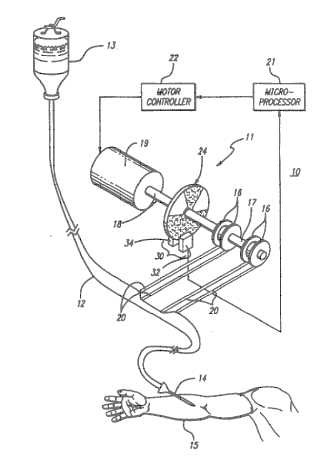
UN ELEMENTO DE ARRASTRE DE UN MECANISMO DE BOMBEO PERISTALTICO INCLUYE UN DISCO (24) QUE ROTA CON EL ELEMENTO DE ARRASTRE (18) Y TIENE DOS SECTORES TRANSPARENTES (27,
26) Y DOS SECTORES OPACOS (28, 29) QUE ALTERNAN CON LOS SECTORES TRANSPARENTES. AL TIEMPO QUE UN MOTOR DE MANDO (19) ROTA EL ELEMENTO DE ARRASTRE PARA BOMBEAR EL FLUIDO (13), UN UNICO SENSOR OPTICO (30) SIENTE EL DISCO Y PROPORCIONA UNAS SEÑALES INDICATIVAS DE SI SE HA DETECTADO UN SECTOR TRANSPARENTE O UN SECTOR OPACO. UN PROCESADOR (21) CUENTA EL NUMERO DE PASOS DEL MOTOR EN EL SECTOR OPACO O TRANSPARENTE DETECTADO Y, BASANDOSE EN EL NUMERO DE PASOS CONTADOS EN UN TIPO DE SECTOR DETECTADO O EL NUMERO DE PASOS CALCULADOS CUANDO OCURRE UN CAMBIO DE UN ESTADO A OTRO TIPO DE SECTOR, DETERMINA LA POSICION DEL MOTOR.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US1995/011529.
Solicitante: CAREFUSION 303, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3750 TORREY VIEW COURT SAN DIEGO, CA 92130 ESTADOS UNIDOS DE AMERICA.
Inventor/es: WARNER, ERIC, A., HOLDAWAY, CHARLES, R.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61M5/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › Dispositivos para introducir agentes en el cuerpo vía subcutánea, intravenosa o intramuscular; Accesorios correspondientes, p. ej. dispositivos de llenado o de limpieza, reposa-brazos (conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; recipientes especialmente adaptados para fines médicos o farmacéuticos A61J 1/00).
- A61M5/142 A61M […] › A61M 5/00 Dispositivos para introducir agentes en el cuerpo vía subcutánea, intravenosa o intramuscular; Accesorios correspondientes, p. ej. dispositivos de llenado o de limpieza, reposa-brazos (conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; recipientes especialmente adaptados para fines médicos o farmacéuticos A61J 1/00). › Perfusión por presión, p. ej. utilizando bombas.
- G01D5/249 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando código de pulsos.
- G01D5/347 G01D 5/00 […] › que utilizan escalas de codificación de desplazamiento.
PDF original: ES-2112219_T1.pdf
Fragmento de la descripción:
Sistema para determinar la posición de un motor en un dispositivo biomédico Antecedentes La presente invención se refiere, en general, a la detección de una posición y, más particularmente, a un sistema y a un método para determinar la posición de un miembro de accionamiento que usa un disco de posicionamiento adaptado para que gire junto con dicho miembro de accionamiento.
Se han desarrollado bombas de infusión para una infusión más precisa de fluidos parenterales a un paciente. Estas bombas han permitido un mayor control de la tasa de infusión y han sido beneficiosas para la administración de fluidos parenterales de múltiples formas. Sin embargo, existe un deseo continuo de que mejore la exactitud y la precisión de estas bombas sobre una gran variedad de caudales.
Un tipo de bomba de infusión es una bomba peristáltica lineal. En esta bomba, un motor de accionamiento hace girar un eje para hacer que las levas pongan en contacto y separen los dedos compresores y un conducto de fluido, provocando así una oclusión secuencial del conducto que sigue un movimiento ondulatorio. Esta oclusión secuencial empuja al fluido parenteral desde un contenedor hasta el paciente a un caudal programado. Las levas están dispuestas a lo largo del árbol de levas de forma que los lóbulos de levas adyacentes sobresalgan en diversas posiciones angulares en relación con el árbol de levas. Los dedos oclusores siguen a los lóbulos de la leva correspondiente cuando gira el motor. El motor de accionamiento es típicamente un motor de velocidad gradual que tiene un número concreto de pasos del motor por rotación completa; por ejemplo, doscientos pasos. En general, el motor de velocidad gradual gira de manera progresiva (paso a paso) , gradual y secuencial durante una rotación completa, definiendo la rotación completa un ciclo de la bomba.
Cada movimiento gradual o paso del motor provoca el movimiento gradual correspondiente de las levas y de los dedos, lo que da como resultado el bombeo de un volumen de fluido discreto. Este volumen discreto puede denominarse "volumen de paso". Debido a las diversas piezas mecánicas implicadas, sus interrelaciones y la configuración lineal del mecanismo de bombeo, una característica inherente de las bombas peristálticas lineales es la desviación entre estos volúmenes de paso. Además, la configuración mecánica de la bomba peristáltica lineal desencadena un contraflujo en el conducto flexible en algún punto o puntos del ciclo de bombeo y los volúmenes de paso en estos puntos son realmente negativos.
La cantidad volumétrica particular bombeada por cada movimiento de un mecanismo de bombeo puede medirse mediante mediciones gravimétricas y puede almacenarse, seguidamente, para referencias posteriores. Un motor de velocidad gradual proporciona una referencia adecuada para una posición y un movimiento del mecanismo de bombeo, ya que existen incrementos definidos de movimiento o "pasos" con los motores de velocidad gradual. Debido a que el motor de velocidad gradual típicamente se monta rígidamente en el árbol de levas, un paso del motor siempre da como resultado un incremento del movimiento del árbol de levas, de las levas y de los dedos de bombeo. De esta manera, determinar una posición del árbol de levas permite determinar la pOSición del motor que acciona el árbol de levas. En los casos en los que se tengan en cuenta los volúmenes de paso en el control de la bomba, debe conocerse la posición del miembro de accionamiento de forma que pueda tenerse en cuenta dicho volumen de paso. Es posible que exista una aplicación así cuando se vaya a aumentar la uniformidad del flujo. Por lo tanto, se requiere información más precisa de la posición del motor.
Tras el arranque de la bomba de infusión, el procesador de bomba típicamente desconoce la posición del miembro de accionamiento. Debido a esta condición, una bomba que considera volúmenes de paso para aumentar la uniformidad del flujo no puede comenzar a controlar la posición del motor con este objetivo y debe dejar que la bomba funcione hasta que la posición pueda determinarse. En primer lugar, el procesador debe determinar el paso en el que está localizado el motor. Sin embargo, es deseable que el procesador pueda determinar rápidamente la posición del miembro de accionamiento del motor de forma que la cantidad de fluido bombeado no sea excesiva antes de que se determine la posición.
En un sistema anterior para determinar la posición del motor, un disco de posicionamiento se fija al eje del motor de accionamiento y tiene una pluralidad de pistas circulares concéntricas de diferentes radios, estando formada cada pista con aberturas de diferentes anchos angulares. Se encuentra asociado a cada pista un sensor óptico, tal como un diodo emisor de luz acoplado a un fotodetector, para detectar las aberturas angulares. Las aberturas están configuradas en la pluralidad de pistas para que correspondan a códigos binarios predeterminados representativos de una posición del motor particular. Se detectan las aberturas durante la rotación del disco codificador y la posición del motor particular determinada. Sin embargo, este sistema incorpora múltiples sensores con sus múltiples sei'iales de salida consecuentes que dan como resultado una complejidad y un gasto crecientes y que requieren un software más complejo para descifrar las numerosas entradas de datos para obtener una posición del motor particular.
Un sistema menos complicado utiliza un indicador individual tipo bandera situado en el eje del accionamiento del motor para indicar la posición. Algunos sistemas peristálticos lineales usan esta bandera para indicar el final del ciclo normal de la bomba y el comienzo del ciclo de aceleración. Aunque los costes en hardware y softw¡:¡re se reducen gracias a un sistema como este, puede necesitar casi una rotación completa del motor para determinar la posición del miembro de accionamiento cuando la posición del arranque del motor esté justo detrás de la bandera. Permitir este gasto de tiempo y movimiento antes de poder determinar la posición del miembro de posicionamiento puede no ser deseable, especialmente cuando estén implicados pasos de flujo negativos.
Otra consideración en el uso de discos o banderas de posición es la precisión requerida para montarlos físicamente en el árbol de levas. Del mismo modo, cuando se usan múltiples levas, estas deben situarse con exactitud en el árbol de levas cada una en relación a la otra y al disco de posición. Cuando todas estas partes están separadas,
cada una debe alinearse individualmente, dando como resultado un aumento de complejidad y gasto.
Por lo tanto, los expertos en la materia lo han encontrado deseable para proporcionar una información más precisa pertinente a la posición del miembro de accionamiento, mientras que, a la vez, se reducen los costes en hardware y software. El sistema debería ser capaz de determinar rápida y eficientemente la posición rotacional del miembro de accionamiento, sin un bombeo excesivo, antes de determinar la posición y sin un uso relativamente caro, ni un hardware o software complejos. También se ha considerado deseable proporcionar un sistema de bombeo de infusión que alivie la necesidad de un bombeo múltiple de alineación individual y de componentes de detección de posición. La presente invención satisface estas y otras necesidades.
El documento EP-A-0530773 desvela una bomba de infusión peristáltica en la que un árbol de levas, que lleva levas que manejan los dedos de la bomba, es accionada por un motor de velocidad gradual y lleva un disco que tiene una hendidura de referencia detectable por una unidad de sensor optoelectrónico en una posiCión circunferencial, que sirve como posición de referencia. Un procesador que controla el motor puede contar impulsos de motor procedentes de la detección de la hendidura de referencia para determinar la posición angular del árbol de levas,
para evaluar si este último se encuentra en la zona muerta o en la zona activa. Como alternativa, es posible que el procesador cuente con ranuras periféricas en el disco y determine la posición del árbol de levas mediante el número de estas ranuras periféricas desde la detección de la hendidura de referencia.
El documento FR-A-2595461 desvela diversas disposiciones para detectar la posición angular de un miembro rotatorio, cuya posición angular está codificada en términos de números binarios de N bits, cada uno de los cuales comprende las últimas señales binarias N producidas en las posiciones del eje respectivas mediante elementos sobre el miembro rotatorio que atraviesa un sensor para estas señales. En una disposición como esta, el miembro rotatorio tiene codificaciones en forma de codificaciones... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para determinar la posición de un elemento de accionamiento, moviéndose el elemento de accionamiento en una multitud de incrementos de movimiento a lo largo de un giro completo, comprendiendo el sistema:
2. Un sistema según la reivindicación 1, en el cual las marcas son de diferentes tamaños, y también son diferentes los tamaños de los espacios entre las marcas.
3. Un sistema según reivindicación 1, en el cual los tamaños de las marcas se eligen de forma que correspondan a una diferente multitud de incrementos de movimiento, y estando seleccionados los tamaños de los espacios situados entre las marcas de forma que correspondan a la diferente multitud de incrementos de movimiento de manera que el procesador, el número de incrementos de movimiento entre las marcas y espacios, pueda determinar la posición del elemento de accionamiento en menos de una vuelta completa.
4. Un sistema según reivindicación 1, en el cual el detector es un detector óptico, y el disco tiene una multitud de sectores transparentes y opacos que forman las marcas.
5. Un sistema según reivindicación 4, en el cual los sectores transparentes tienen diferentes tamaños correspondientes a una multitud de incrementos de movimiento inferior al número total de incrementos de movimiento de un giro completo del elemento de accionamiento, y dos sectores opacos están separados y alternan con los sectores transparentes.
6. Un sistema según reivindicación 1, que comprende además un mecanismo de bombeo accionado por el elemento de accionamiento de manera tal que cuando el elemento de accionamiento gira a través de la multitud de incrementos de movimiento durante una vuelta completa, el mecanismo de bombeo bombea correspondientes incrementos de volumen de fluido a lo largo de un ciclo completo de bombeo, variando en cantidad los incrementos de volumen, donde algunos de los incrementos de volumen son menores que otros, y el ciclo de la bomba incluye un grupo de incrementos de volumen secuencial menores; y
donde las marcas están situadas en el disco para indicar una determinada posición del elemento de accionamiento.
7. Un sistema según reivindicación 6, en el cual las marcas están formadas por sectores con diferente dimensión angular, siendo una de dichas marcas mayor que las demás marcas, y estando situada la marca mayor en el disco correspondiente al grupo de incrementos de menor volumen.
8. Un sistema según reivindicación 6, en el cual el elemento de accionamiento comprende un motor paso-a-paso, y el procesador controla el motor paso-a-paso para que gire en movimientos incrementales a lo largo del giro completo.
9. Un sistema según reivindicación 1, que comprende además un mecanismo de bombeo accionado por el elemento de accionamiento de manera tal que cuando el elemento de accionamiento gira a través de la multitud de incrementos de movimiento a lo largo de un giro completo, el mecanismo de bombeo bombea en consecuencia incrementos de fluido durante un ciclo completo de la bomba, variando en cantidad los incrementos de volumen, siendo algunos de los incrementos de volumen mayores que otros e incluyendo el ciclo de la bomba un grupo de incrementos de volumen mayores; y
estando situados los marcadores en el disco para indicar una determinada posición del elemento de accionamiento.
10. Un sistema según reivindicación 9, en el cual los marcadores están formados por sectores que tienen diferente dimensión angular, siendo uno de dichos marcadores menor que los demás marcadores y estando situado el marcador menor en el disco correspondiendo al grupo de incrementos de volumen mayores.
11. Un sistema según reivindicación 9, en el cual el elemento de accionamiento comprende un motor paso-a-paso, y el procesador controla el motor paso-a-paso para que gire en multitud de movimientos incrementales a lo largo del giro completo.
12. Un sistema para determinar la posición de un elemento de accionamiento y un motor paso-a-paso que hace girar el elemento de accionamiento, moviéndose el elemento de accionamiento y el motor en una multitud de incrementos de movimiento a lo largo de un giro completo, comprendiendo el sistema:
13. Un sistema según reivindicación 12 en el cual los sectores primeros y segundos tienen diferente dimensión angular.
14. Un sistema según reivindicación 12 en el cual los primeros sectores comprenden sectores opacos y los segundos sectores comprenden sectores transparentes.
15. Un sistema según reivindicación 14 en el cual las dimensiones y el emplazamiento de los sectores opacos y transparentes están elegidos de forma tal que el elemento de accionamiento no gire más de un determinado número de incrementos de movimiento antes de calcularse su posición.
16. Un sistema según reivindicación 14 en el cual el elemento de accionamiento comprende un mecanismo de bombeo accionado por el motor de modo que cuando el motor gira a través de la multitud de incrementos de movimiento efectuando un giro completo, el mecanismo de bombeo bombea correspondientemente unos incrementos de volumen de fluido a lo largo de un ciclo completo de la bomba, variando los incrementos de volumen en cantidad, donde algunos de los incrementos de volumen son menores que otros, y el ciclo de la bomba incluye un grupo de incrementos de volumen secuenciales menor; y
donde las marcas están situadas en el disco para indicar una determinada posición del elemento de accionamiento.
17. Un sistema según reivindicación 16, en el cual la multitud de sectores transparentes y opacos tienen diferentes dimensiones angulares, siendo uno de dichos sectores mayor que los demás sectores, y estando posicionado el sector mayor en el disco de forma correspondiente al grupo de incrementos de volumen menor.
18. Un sistema según reivindicación 14, comprendiendo además un mecanismo de bombeo adecuado para ser movido por el elemento de accionamiento de manera tal que cuando el elemento de accionamiento gira a través de la multitud de incrementos de movimiento efectuando un giro completo, el mecanismo de bombeo bombea correspondientemente unos incrementos de volumen de fluido a lo largo de un ciclo de bombeo completo, variando los incrementos de volumen en cantidad, donde algunos de los incrementos de volumen son mayores que otros y el ciclo de la bomba incluye un grupo de incrementos de volumen secuencial mayor; y
donde los sectores transparentes y opacos están situados en el disco de forma que indiquen una determinada posición del elemento de accionamiento.
19. Un sistema según reivindicación 18, en el cual la multitud de sectores transparentes y opacos tienen diferente dimensión angular, siendo uno de dichos sectores menor que los demás sectores, y estando posicionado el sector menor en el disco correspondiéndose con el grupo de incrementos de volumen mayor.
20. Un sistema según reivindicación 12, en el cual los sectores transparentes están formados como dos aperturas en el disco.
21. Un sistema según reivindicación 12, en el cual el elemento de accionamiento comprende un motor paso-a-paso, y el procesador controla al motor paso-a-paso para que gire efectuando los movimientos incrementales a lo largo del giro completo.
Patentes similares o relacionadas:
Dispositivo de bloqueo de seguridad de captura de aguja para catéter, del 10 de Junio de 2020, de BECTON, DICKINSON AND COMPANY: Un montaje de catéter que comprende: un catéter flexible; una aguja que tiene una punta distal filosa, la aguja dispuesta en el […]
Puerto de acceso que incluye un septo con tres salientes y un dispositivo de comunicación para la identificación del septo, del 10 de Junio de 2020, de C.R. BARD, INC.: Un puerto de acceso implantable que comprende: un cuerpo que define una cavidad, estando el cuerpo configurado para capturar […]
Dispositivo médico de inyección que tiene un protector, del 10 de Junio de 2020, de NOVO NORDISK A/S: Un dispositivo de inyección prellenado para el suministro de dosis establecidas de un medicamento líquido que comprende: Una carcasa con forma de pluma […]
Vástago de émbolo conectable y empaquetado asociado, del 10 de Junio de 2020, de Becton Dickinson France S.A.S: Un sistema de empaquetado de jeringas , que comprende: un cilindro de jeringa que tiene un primer extremo , un segundo extremo […]
Aparato médico de aplicación en la piel, del 3 de Junio de 2020, de Zurex Pharma, Inc: Aparato para aplicar un fluido, que comprende un cuerpo principal hueco que tiene un extremo proximal abierto del cuerpo principal, […]
Dispositivo médico basado en aguja, que incluye una guía de aguja y procedimiento de construcción, del 3 de Junio de 2020, de ERSKINE MEDICAL LLC: Un dispositivo médico basado en aguja que comprende: una aguja con un extremo proximal y un extremo distal ; un tubo con un primer lumen ; […]
Aparato de seguridad y método para rastrear, controlar y vigilar la administración de sustancias médicas, del 27 de Mayo de 2020, de Murata ID Solutions S.r.l: Aparato de seguridad para rastrear, controlar y vigilar la administración de sustancias médicas, que comprende: - un envase de una […]
Aparato autoinyector con recipiente flexible, del 27 de Mayo de 2020, de MERIDIAN MEDICAL TECHNOLOGIES, INC.: Un aparato autoinyector, que comprende: un recipiente flexible (16; 108; 108' , 108"; 320, 322; 420, 422; 502) que contiene un medicamento líquido ; una […]