Ensamblaje de transferencia.
Ensamblaje de transferencia (1) comprendiendo
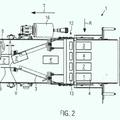
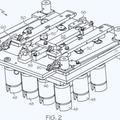
- un transportador de alimentación (2) con una cinta transportadora para mover productos (5) en una dirección de transporte (3);
- un transportador de descarga (4);
- un primer robot de transferencia (6) dispuesto a un lado de dicha cinta transportadora;
- un segundo robot de transferencia (9) dispuesto al otro lado de dicha cinta transportadora; y
- un tercer robot de transferencia (7,8) situado en una dirección transversalmente a dicha dirección de transporte (3) entre dichos primer y segundo robots (6,9),
donde dichos robots (6-9) comprenden un área operativa con un área central (10), y las áreas centrales (10) de dichos robots de transferencia (6-9) se sitúan una detrás de la otra en la dirección de transporte (3) de dicho transportador de alimentación (2), caracterizado por el hecho de que dicho transportador de descarga (4) está dispuesto encima de dicho transportador de alimentación (2) y cruza dicho transportador de alimentación (2) y las áreas centrales (10) de dichos robots de transferencia (6-9), de modo que cada uno de dichos robots de transferencia (6-9) puede colocar los productos (5) escogidos de dicho transportador de alimentación (2) en dicho transportador de descarga (4).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10190442.
Solicitante: BLUEPRINT HOLDING B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: Oostzee 26 3446 CH Woerden PAISES BAJOS.
Inventor/es: FORTMAN,RONALD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/53 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › entre transportadores que se cruzan.
- B65G47/68 B65G 47/00 […] › adaptados para recibir los objetos que llegan de un transportador en una capa y para transferirlos en capas individuales a más de un transportador, o viceversa , p. ej. combinando el paso de objetos transportados por más de un transportador.
PDF original: ES-2420858_T3.pdf
Fragmento de la descripción:
Ensamblaje de transferencia [0001] La presente invención se refiere a un ensamblaje de transferencia como se describe en el preámbulo de la reivindicación 1.
Tales ensamblajes de transferencia son generalmente conocidos en el estado de la técnica y se usan en casos donde un gran número de productos deben ser eliminados de un transportador de alimentación y se deben colocar en otro lugar. La colocación de productos en otro lugar puede comprender colocarlos en alguna forma de embalaje, pero también puede comprender el "estrechamiento" de una fila ancha de productos para formar una fila más estrecha de productos.
Si el transportador de alimentación tiene gran capacidad, se ha descubierto que es práctico usar varios robots de transferencia, tales como robots pick-and-place. En ciertas formas de realización, estos están dispuestos de manera que ciertos robots de transferencia son situados arriba respecto a los otros robots. Esto significa que el primer robot que está más lejos arriba realiza la mayor parte del trabajo de transferencia mientras que el robot que está situado más lejos abajo principalmente funciona como un sistema de seguridad para evitar que los productossean transferidos, siendo esto indeseable. Éste es preferiblemente controlado por una unidad de control, permitiendo cargar el robot que está más lejos abajo en mayor grado controlando los productos que deben ser transferidos.
El uso de varios robots de transferencia es suscitado porque robots más o menos estandarizados están volviéndose más fácilmente disponibles, utilizables y cada vez menos costosos.
Es posible que el robot de transferencia coloque el producto agarrado en otra cinta transportadora que esté situada junto al transportador de alimentación y funcione como transportador de descarga. Es posible que otra cinta transportadora esté presente a cada lado de la cinta transportadora y paralela a ésta. Ésta es entonces preferiblemente más pequeña que el transportador de alimentación de modo que una fila ancha de productos que procede, por ejemplo, de un horno o similar se configure para formar una fila más estrecha. En este caso, tales cintas u otras cintas transportadoras que viajan paralelas a los transportadores de alimentación pueden moverse en la misma dirección que el transportador de alimentación u opuestas a éste.
Otra propuesta que es conocida del estado de la técnica es un transportador de descarga que se extiende en ángulos rectos respecto al transportador de alimentación.
Con productos tales como productos alimenticios, pero también con otros productos que se someten a un tratamiento (final) en un recorrido de tratamiento ancho, tal como un horno o similar, los transportadores de descarga usados en el proceso están volviéndose cada vez más amplios debido a que la capacidad del dispositivo de tratamiento aumenta firmemente. Esto significa que la capacidad de los robots de transferencia y transportador de descarga se vuelven cada vez más importantes con el objetivo de poder transferir un gran número de productos.
Para usar la capacidad de los robots de transferencia de forma tan eficaz como sea posible, el recorrido que debe ser recorrido por cada robot del transportador de alimentación hasta la posición de descarga tiene que ser tan como corto como sea posible. No obstante, por otro lado, se necesita tomar medidas suficientes para asegurar que los productos que deben ser transferidos sean de hecho todos colocados.
NL 1000675 C divulga un dispositivo de transferencia según el preámbulo de la reivindicación 1, en el que varias cintas de descarga están dispuestas junto a una cinta de alimentación.
Es un objeto de la presente invención mejorar los ensamblajes de transferencia conocidos del estado de la técnica, como resultado de lo cual se puede crear una capacidad de transferencia máxima a coste mínimo, es decir usando un número mínimo de robots de transferencia.
Este objeto se consigue por un ensamblaje de transferencia descrito anteriormente con las características de la reivindicación 1.
Según la presente invención, los robots de transferencia están posicionados de manera que el rango operativo de los robots juntos delimita una vía que se extiende a un ángulo al transportador de alimentación que no es perpendicular. Como resultado de ello, cada uno de los robots de transferencia puede ser activo mientras recorre un recorrido pequeño mientras que sigue cubriendo el área entera del transportador de alimentación de una manera simple. Todos los robots son desplazados uno respecto al otro, ambos en la dirección de transporte y en ángulos rectos a ellos.
Preferiblemente, las áreas operativas del robot de transferencia se superponen una a la otra, visto en la dirección de transporte del transportador de alimentación. No obstante, debido al posicionamiento según la presente invención, estas áreas operativas se sitúan ligeramente una detrás de la otra. Esto significa que el flujo de productos que no pudieran ser manipulados por el robot de transferencia situado más lejos arriba debido a la falta de capacidad, pueden todavía ser agarrados por el robot de transferencia o robots de transferencia posterior (es) y ser desplazados en la manera deseada. Esto hace el sistema muy seguro. Lo mismo se aplica al tercer robot de transferencia, cuyo rango operativo coincide (parcialmente) con aquel del segundo robot de transferencia. Como resultado de ello, el segundo robot de transferencia principalmente actúa como un sistema de seguridad, es decir previene que los productos sean conducidos por el transportador de alimentación sin haber sido tratados, lo que es indeseable. No obstante, observando los productos y usando una unidad de control adecuada, este segundo robot de transferencia puede desempeñar una parte sustancial de las operaciones. Obviamente, siempre tendrá que haber espacio suficiente en el transportador de descarga para colocar el producto del robot situado más lejos abajo. El número de robots de transferencia se pueden seleccionar como función de la anchura de la cinta de alimentación. En principio, no hay número máximo, pero preferiblemente como mucho 6-10 de tales robots son usados.
La posición de descarga comprende un transportador de descarga y más particularmente un transportador de descarga que se extiende a un ángulo inferior a 90° con el transportador de alimentación. Más particularmente, el ángulo del transportador de descarga con respecto a la dirección de alimentación es entre 10 y 50° y más particularmente aproximadamente 15°. El transportador de descarga puede comprender un componente de movimiento que coincide con la dirección de transporte del transportador de alimentación. Es también posible que este componente sea exactamente opuesto a la dirección de transporte del transportador de alimentación. El transportador de descarga se puede realizar de cualquier manera concebible. Es decir que éste se puede concretar como una cinta con perfiles o cinta con elementos portadores. Además, se puede configurar para transportar bandejas en las que los productos respectivos están dispuestos.
La parte de retorno de tal transportador de descarga se puede situar tanto por debajo como por encima del transportador de alimentación.
Según otra forma de realización particular de la presente invención, las áreas operativas de los distintos robots de transferencia definen una vía a través de la cual una línea se puede extraer que se extiende paralela a un transportador de descarga que puede estar presente. Más particularmente, cada robot de transferencia tiene un área central que comprende un centro y la línea dibujada a través de estos centros es una recta que se extiende en paralelo al transportador de descarga.
Es posible transferir todos los productos que se sitúan en el transportador de alimentación al transportador de descarga. No obstante, es también posible hacer una selección. Al transferir los productos a un transportador de descarga, la anchura de transporte del transportador de descarga es preferiblemente más pequeña que la del transportador de alimentación. Es decir que cuando el transportador de descarga está descargando todos los productos, se moverá a una velocidad mucho más alta que el transportador de alimentación con el objetivo de poder alojar el número pequeño de filas de productos. Una o más filas pueden estar presentes.
Naturalmente, es posible disponer varios transportadores de descarga paralelos unos a otros o disponerlos de otra manera. El transportador de alimentación y el transportador de descarga puede estar moviéndose sustancialmente en la misma dirección de transporte, pero también puede estar moviéndose en direcciones opuestas.... [Seguir leyendo]
Reivindicaciones:
1. Ensamblaje de transferencia (1) comprendiendo
- un transportador de alimentación (2) con una cinta transportadora para mover productos (5) en una dirección de transporte (3) ;
- un transportador de descarga (4) ;
- un primer robot de transferencia (6) dispuesto a un lado de dicha cinta transportadora;
- un segundo robot de transferencia (9) dispuesto al otro lado de dicha cinta transportadora; y
- un tercer robot de transferencia (7, 8) situado en una dirección transversalmente a dicha dirección de transporte (3) entre dichos primer y segundo robots (6, 9) , donde dichos robots (6-9) comprenden un área operativa con un área central (10) , y las áreas centrales (10) de dichos robots de transferencia (6-9) se sitúan una detrás de la otra en la dirección de transporte (3) de dicho transportador de alimentación (2) , caracterizado por el hecho de que dicho transportador de descarga (4) está dispuesto encima de dicho transportador de alimentación (2) y cruza dicho transportador de alimentación (2) y las áreas centrales (10) de dichos robots de transferencia (6-9) , de modo que cada uno de dichos robots de transferencia (6-9) puede colocar los productos (5) escogidos de dicho transportador de alimentación (2) en dicho transportador de descarga (4) .
2. Ensamblaje de transferencia según la reivindicación 1, donde cada área central (10) comprende un centro (11) y los centros (11) de dichos robots de transferencia (6-9) definen una línea recta (13) .
3. Ensamblaje de transferencia según la reivindicación 2, donde dicha línea recta (13) hace un ángulo (a) con dicha dirección de transporte (3) de entre 10° y 50°.
4. Ensamblaje de transferencia según la reivindicación 3, donde dicha línea recta (13) hace un ángulo (a) de aproximadamente 15° con dicha dirección de transporte (3) .
5. Ensamblaje de transferencia según una de las reivindicaciones precedentes 2-4, donde dicho transportador de descarga (4) se extiende sustancialmente paralelo a dicha recta (13) .
6. Ensamblaje de transferencia según la reivindicación 5, donde dicho transportador de alimentación (2) está realizado de manera que éste transporta n filas de productos (5) y dicho transportador de descarga está realizado de manera que éste transporta como mucho n/2 filas de productos.
7. Ensamblaje de transferencia según una de las reivindicaciones precedentes, donde dicho robot de transferencia (6-9) comprende un robot pick-and-place.
8. Ensamblaje de transferencia según una de las reivindicaciones precedentes, que comprende un cuarto robot de transferencia (8, 7) entre dicho primer (6) y tercer (7, 8) robot.
9. Combinación, que comprende un dispositivo de producción para productos y un ensamblaje de transferencia (1) según una de las reivindicaciones precedentes, el transportador de alimentación (2) del ensamblaje de transferencia
(1) funcionando como una descarga para dicho dispositivo de producción y extendiéndose fuera del mismo.
10. Método para transferir filas de productos suministrados (5) usando un ensamblaje de transferencia (1) o combinación según cualquiera de las reivindicaciones precedentes, donde un gran número de filas de productos (5) situadas una junto a la otra en el transportador de alimentación (2) se desplazan en la dirección de alimentación (3) , y son posteriormente transferidas por los robots de transferencia (6-9) al transportador de descarga (4) para formar al menos una fila de productos de descarga (5) situada una junto a la otra en el transportador de descarga (4) , el número de filas de productos de descarga (5) situadas en el transportador de descarga (4) siendo más pequeño que el número de filas de productos (5) situadas en el transportador de alimentación (2) donde la dirección de descarga (12) hace un ángulo a de 10-50° con la dirección de alimentación (3) .
Patentes similares o relacionadas:
Dispositivo y procedimiento para transferir varios flujos de productos paralelos a un único flujo de productos o viceversa, del 7 de Agosto de 2019, de THEEGARTEN-PACTEC GMBH & CO. KG: Dispositivo para transferir varios flujos de productos (R1, R2) paralelos entre sí formados cada uno por productos (P) en trozos pequeños, preferentemente […]
Procedimiento de agrupación y dispositivo de agrupación para generar y reunir grupos de artículos a partir de una multitud de artículos, del 19 de Febrero de 2019, de THEEGARTEN-PACTEC GMBH & CO. KG: Procedimiento de agrupación para generar y reunir grupos (G) de artículos (A) a partir de una multitud de artículos (A), en particular artículos […]
Cinta transportadora y unidad de transporte, del 9 de Enero de 2019, de DAIFUKU CO., LTD.: Una cinta transportadora que comprende: una banda sin fin enrollada sobre una pluralidad de elementos de bobinado […]
Dispositivo de separación para una máquina de envasado y procedimiento, del 6 de Junio de 2018, de MULTIVAC SEPP HAGGENMULLER GMBH & CO. KG: Dispositivo de separación para una máquina de envasado , que comprende un primer sistema de cinta y un segundo sistema de cinta que están dispuestos de manera […]
Sistema y método de transporte y acumulación de productos, del 7 de Junio de 2017, de GARVEY CORPORATION: Un sistema de transporte y acumulación de productos , que comprende: (a) un primer medio de transporte para el desplazamiento de productos desde una […]
 Procedimiento y dispositivo para unir líneas que comprende un dispensador de etiquetas, del 31 de Agosto de 2016, de MULTIVAC Sepp Haggenmüller SE & Co. KG: Dispositivo de unión de líneas con al menos
una cinta transportadora con una dirección de transporte (T) y
dos carriles guía móviles que pueden […]
Procedimiento y dispositivo para unir líneas que comprende un dispensador de etiquetas, del 31 de Agosto de 2016, de MULTIVAC Sepp Haggenmüller SE & Co. KG: Dispositivo de unión de líneas con al menos
una cinta transportadora con una dirección de transporte (T) y
dos carriles guía móviles que pueden […]
 Conjunto de cabezal de mordazas ajustables, del 31 de Agosto de 2016, de Standard Knapp Inc: Conjunto de cabezal de mordazas para una máquina de procesamiento de productos, que comprende:
un soporte de mordazas, que incluye:
una […]
Conjunto de cabezal de mordazas ajustables, del 31 de Agosto de 2016, de Standard Knapp Inc: Conjunto de cabezal de mordazas para una máquina de procesamiento de productos, que comprende:
un soporte de mordazas, que incluye:
una […]
Aparato de descarga de bolsas de producto del tipo dúplex, del 4 de Mayo de 2016, de TOYO JIDOKI CO., LTD.: Un aparato de descarga de bolsas de producto de tipo dúplex para dos bolsas de producto llenas y selladas recibidas, que son agarradas por parejas separadas de pinzas […]