Vehículo, en particular robot de juguete con accionamiento por vibraciones.
Un vehículo (100), en particular un robot de juguete, que comprende:
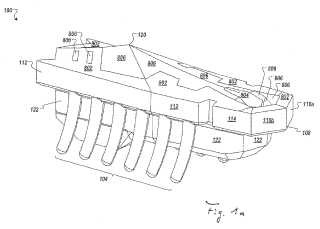
un saliente (108), una pluralidad de patas (104) que comprenden al menos una pata delantera (104a) y al menos una pata trasera sobre cada lado del vehículo y un accionamiento por vibraciones (202), en el que las patas (104) del vehículo (100) están dobladas y son flexibles, o en el que el accionamiento por vibraciones (202) puede generar una fuerza (Fv) dirigida hacia abajo, que es adecuada para desviar al menos las patas delanteras (104a) para que el vehículo (100) se mueva hacia delante, caracterizado porque la geometría de las patas traseras (104c) está configurada de tal forma que se contrarrestan las tendencias a una rotación en virtud de la vibración del accionamiento por vibraciones (202) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10179680.
Solicitante: Innovation First, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1519 Int. 30 W. Greenville, TX 75402 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Norman,David Anthony, Mimlitch,III Robert H, Galletti,Douglas Michael, Carter,Joel Reagan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63H11/02 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 11/00 Figuras que se desplazan por sí mismas. › movidas por las vibraciones producidas por masas que giran excéntricamente.
- A63H17/26 A63H […] › A63H 17/00 Vehículos, p. ej. automotores; Sus accesorios. › Detalles; Accesorios (mecanismos motores A63H 29/00).
- A63H29/22 A63H […] › A63H 29/00 Mecanismos motores para juguetes en general. › Mecanismos eléctricos (alimentación de energía eléctrica por la vía A63H 18/12).
PDF original: ES-2383880_T3.pdf
Fragmento de la descripción:
Vehículo, en particular robot de juguete con accionamiento por vibraciones Campo de la invención La presente invención se refiere a vehículos con accionamiento por vibraciones, en particular robots de juguete con accionamiento por vibraciones y varias patas, en los que los robots de juguete son similares a animalitos o bien a bichitos vivos que gatean.
Antecedentes de la invención Se conocen en el estado de la técnica vehículos con accionamiento por vibraciones que se designan por el técnico, en general, como "Vibrobots".
Una forma especial de "Vibrobots" es el llamado "Bristlebot", que está constituido por una cabeza de cepillo de dientes cortada, una batería y un accionamiento por vibraciones. El "Bristlebot" se apoya frente al suelo con los cepillos de la cabeza de cepillo de dientes; los cepillos corresponden, por lo tanto, en cierto modo a las patitas de un "Bristlebot". Tanto la batería como también el accionamiento por vibraciones están dispuestos por encima de la cabeza de cepillo de dientes. A través de la vibración se desplaza en oscilación toda la cabeza de cepillo de dientes, de manera que el "Bristlebot" se puede mover hacia delante. Tales Bristlebots se conocen a partir de los documentos FR 1 564 711 A, FR 2 358 174 A1 y US 4 219 957 A.
El tipo de movimiento de avance y las propiedades mecánicas del "Bristlebot" son, sin embargo, muy poco satisfactorios en muchos aspectos. Esto conduce a que un "Bristlebot" no actúe desde el punto de vista de un usuario o de otra persona precisamente como un bichito vivo, sino incluso solamente como una cabeza de cepillo de dientes vibratoria.
Otra forma del "Bristlebot" se conoce a partir del documento GB 2 427 529 A. Este "Bristlebot" tiene una configuración en forma de huevo con dos cabezas de cepillo de dientes como series de patas. Este "Bristlebot" no actúa como un bichito vivo, sino más bien como un huevo de avanza.
El documento US 6 899 589 B1 publica un robot de juguete que salta en forma de un tigre. Este tigre de juguete presenta un accionamiento por vibraciones y patas verticales con muelles de salto.
Resumen de la invención La presente invención se refiere a un vehículo de acuerdo con la reivindicación 1. Las reivindicaciones dependientes se refieren a configuraciones ventajosas de la presente invención.
El vehículo de la presente invención tiene varias patas y un accionamiento por vibraciones. Con "vehículo" se entiende en la presente invención cualquier robot móvil, en particular robot de juguete en general, y robots de juguete que presentan la forma de un bicho o de otro animal, de un insecto o de un reptil.
De acuerdo con un aspecto de la invención, las patas del vehículo pueden estar dobladas y ser flexibles. El accionamiento por vibraciones puede generar una fuerza (Fv) dirigida hacia abajo, que es adecuada para desviar al menos las patas delanteras, de manea que el vehículo se mueve hacia delante. Las patas del vehículo están inclinadas con preferencia en una dirección que está desviada de la vertical. La base de las patas está dispuesta, por lo tanto, más adelantada en el vehículo con respecto a la punta de las patas. En particular, las patas delanteras están adaptadas para doblarse cuando el vehículo vibra en virtud del accionamiento por vibraciones. A la inversa, el accionamiento por vibraciones puede generar también una fuerza (Fv) dirigida hacia arriba, que es adecuada para que el vehículo salte, o para que las patas delanteras se eleven desde la superficie de base.
De acuerdo con otro aspecto de la invención, la geometría de las patas traseras puede estar configurada de tal forma que se consigue un efecto diferente de frenado o bien de arrastre. La geometría de las patas que siguen detrás está configurada de tal forma que se contrarrestan las tendencias de una rotación en virtud de la vibración del accionamiento por vibraciones. El peso excéntrico giratorio se mueve - con relación al eje longitudinal del vehículo - durante el salto de las patas delanteras en dirección lateral, de manera que el vehículo se movería son contra medidas a lo largo de una curva. Se pueden conseguir contra medidas de diferentes maneras: se puede desplazar más peso sobre una pata delantera en comparación con la otra pata delantera. La longitud de una pata trasera se puede elevar en comparación con la otra pata trasera. La rigidez de las patas se puede eleva sobre un lado en comparación con las patas sobre el otro lado. Una pata trasera puede estar configurada más gruesa en comparación con las otras patas traseras sobre el otro lado. Una de las patas traseras puede estar dispuesta más adelantada que la otra pata trasera.
De acuerdo con otro aspecto de la invención, el vehículo puede estar construido para girar a través de la acción del par de giro de rotación del accionamiento por vibraciones y para alinearse por sí mismo. Esto se puede conseguir, por ejemplo, posicionando el centro de gravedad del cuerpo o bien el centro de la fuerza de la gravedad del vehículo cerca o sobre el eje de rotación del accionamiento por vibraciones. Adicionalmente, los lados y el lado superior del vehículo pueden estar construidos para facilitar la alineación automática del vehículo durante la vibración. De esta manera, se puede prever sobre el lado superior del vehículo un punto alto, para que el vehículo pueda estar sobre el dorso no girado totalmente. Pero también se pueden disponer extremidades, láminas o aletas en los lados y/o sobre el dorso del vehículo, cuyos puntos exteriores se encuentran con preferencia cerca o sobre un cilindro virtual.
De acuerdo con otro aspecto de la invención, las patas pueden estar dispuestas en dos series de patas, estando previsto entre el cuerpo del vehículo y las patas del vehículo un espacio, en particular una escotadura en forma de V, para que las patas se puedan doblar durante un giro de alineación hacia dentro. De esta manera, se facilita el movimiento de alineación del vehículo, en el caso de que se cayese una vez. Con preferencia, las patas están dispuestas en dos series de patas así como lateralmente y por encima del eje de rotación del accionamiento por vibraciones.
De acuerdo con otro aspecto de la invención, el vehículo puede tener una proyección de resorte o bien una parte delantera de resorte, de manera que el vehículo rebota cuando incide sobre un obstáculo. La proyección de resorte o bien la parte delantera de resorte está configurada con preferencia de goma. Además, la proyección de resorte o bien la parte delantera de resorte están configuradas con preferencia de manera que terminan en punta. De este modo, el vehículo puede eludir más fácilmente un obstáculo, sin la utilización de un sensor o de otro control de un movimiento de dirección.
De acuerdo con otro aspecto de la invención, el accionamiento por vibraciones puede presentar un motor y un peso excéntrico, de manera que el peso excéntrico está dispuesto delante de las patas delanteras. De esta manera, se consigue un movimiento de salto reforzado de las patas delanteras, permaneciendo las patas traseras a ser posible en el suelo (pero pudiendo saltar también ligeramente) . En particular, el peso excéntrico está dispuesto delante del motor. Además, una batería está dispuesta con preferencia en la parte trasera del vehículo para elevar el peso sobre las patas traseras. Tanto la batería como también el motor están dispuestos con preferencia entre las patas. El eje de rotación del motor se puede extender a lo largo del eje longitudinal del vehículo.
De acuerdo con los principios de la presente invención, el vehículo puede estar configurado también con accionamiento por vibraciones, y puede imitar una forma de vida orgánica, en particular un buchito vivo u otro animalito, con relación a la velocidad del movimiento de avance, la estabilidad del movimiento de avance, una tendencia a andar de una lado para otro, la capacidad para alinearse de nuevo, y/o la individualidad.
La presente invención puede ser un vehículo o un robot de juguete con accionamiento por vibraciones, que sigue uno o varios de los siguientes objetivos:
1. Vehículo con accionamiento por vibraciones con patas flexibles en configuración variada.
2. Incremento al máximo de la velocidad del vehículo.
3. Modificación de la dirección predominante del movimiento del vehículo.
4. Prevención del vuelco del vehículo.
5. Generación de vehículos, que se pueden alinear por sí mismos.
6. Generación de un movimiento, que se parece a animales vivos, en particular bichitos, insectos,... [Seguir leyendo]
Reivindicaciones:
1. Un vehículo (100) , en particular un robot de juguete, que comprende: un saliente (108) , una pluralidad de patas (104) que comprenden al menos una pata delantera (104a) y al menos una pata trasera sobre cada lado del vehículo y un accionamiento por vibraciones (202) , en el que las patas (104) del vehículo (100) están dobladas y son flexibles, o en el que el accionamiento por vibraciones (202) puede generar una fuerza (Fv) dirigida hacia abajo, que es adecuada para desviar al menos las patas delanteras (104a) para que el vehículo (100) se mueva hacia delante, caracterizado porque la geometría de las patas traseras (104c) está configurada de tal forma que se contrarrestan las tendencias a una rotación en virtud de la vibración del accionamiento por vibraciones (202) .
2. Vehículo de acuerdo con la reivindicación 1, caracterizado porque la geometría de las patas traseras (104c) está configurada de tal forma que se consigue un efecto de frenado o bien de arrastre diferente de las patas.
3. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se desplaza más peso sobre una pata delantera en comparación con la otra pata delantera.
4. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la longitud de una pata trasera está elevada en comparación con la otra pata trasera.
5. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la rigidez de las patas sobre un lado está elevada en comparación con las patas sobre el otro lado.
6. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque una pata trasera está configurada más gruesa en comparación con la otra pata trasera sobre el otro lado.
7. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque las patas del vehículo están inclinadas en una dirección, que está desplazada de la vertical.
8. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la base de las patas en el vehículo está dispuesta más adelantada frente a la punta de las patas.
9. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque dos o más patas, especialmente las patas delantera, están adaptadas para doblarse, cuando el vehículo vibra en virtud del accionamiento por vibraciones (202) .
10. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el accionamiento por vibraciones (202) puede generar una fuerza (Fv) dirigida hacia arriba, que es adecuada para que el vehículo (100) dé brincos, o porque las patas delanteras (104a) se elevan desde la superficie de base.
11. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el accionamiento por vibraciones (202) puede generar una fuerza (Fh) dirigida lateralmente, que genera una tendencia a que el vehículo (100) se gire, cuando el saliente (108) del vehículo se ha elevado.
12. Vehículo de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el vehículo (100) está configurado de tal manera que las patas traseras (104c) del vehículo (100) solamente se arrastran detrás, pero no brincan.
Patentes similares o relacionadas:
Elemento de acoplamiento, del 18 de Marzo de 2020, de Jarola Vision B.V: Elemento de acoplamiento que comprende un cuerpo con un eje axial que se puede disponer en una abertura de un objeto , cuyo […]
VEHÍCULO DE JUGUETE INTERACTIVO, del 20 de Noviembre de 2019, de FABRICAS AGRUPADAS DE MUÑECAS DE ONIL, S.A.: 1. Vehículo de juguete interactivo caracterizado porque comprende un centro de control electrónico configurado para manejar al menos una señal en un panel del vehículo […]
Grupo constructivo de dispositivo giratorio para un juguete, del 4 de Septiembre de 2019, de BRUDER SPIELWAREN GMBH + CO. KG: Grupo constructivo de dispositivo giratorio para un juguete, con - un componente de eje (3a; 17) que define un eje de giro del grupo constructivo de dispositivo […]
Vehículo de juguete transformable que voltea capaz de agarrar un juguete, del 5 de Junio de 2019, de Guangdong Alpha Animation & Culture Co., Ltd: Un vehículo de juguete que voltea y se transforma capaz de agarrar juguetes, en donde dicho vehículo comprende una pluralidad de partes de despliegue elásticas, […]
Modelo de automóvil, del 6 de Marzo de 2019, de Gateway Autoart Limited: Un modelo de tipo de coche que comprende: una carrocería formada de una resina; un miembro de refuerzo (20, 20') que está formado de un metal y ha de ser […]
Vehículo de juguete, del 14 de Diciembre de 2018, de BRUDER SPIELWAREN GMBH + CO. KG: Vehículo de juguete - con un bastidor base con al menos una guía de elevación de bastidor base y una guía de carro de bastidor base , […]
Coche a pedales con trenes de engranajes-doble-cono, del 23 de Julio de 2018, de PORRAS VILA,FCO. JAVIER: EL coche a pedales con trenes de engranajes-doble-cono, es un móvil formado por un chasis con cuatro ruedas de caucho . Las del eje anterior son independientes […]
Un conjunto de rueda de juguete y un método para fabricar el mismo, del 2 de Noviembre de 2016, de LEGO A/S: Un conjunto de rueda de juguete , preferiblemente para un vehículo de juguete, dicho conjunto de rueda de juguete incluye una llanta , una […]