Sistema para la determinación del movimiento de una construcción oscilante.
Sistema para la determinación del movimiento de una construcción oscilante en la que está colocado de manerafija un receptor (2),
formado por al menos tres emisores de referencia (4) con posición conocida y fijarespectivamente cuyas señales de emisión están configuradas como señales moduladas en un soporte confrecuencia portadora definida, un dispositivo de valoración que está configurado para determinar valores de mediciónde fase a partir de las señales de emisión recibidas por el receptor (2) de los emisores de referencia individuales (4)teniendo en consideración la frecuencia portadora definida, a partir de los cuales pueden calcularse la distanciarespectivamente a los emisores de referencia (4) y la modificación de la posición del receptor (2) y con ello de laconstrucción oscilante, en el que se calcula la distancia entre el receptor (2) y el respectivo emisor de referencia (4)a partir deen la que d es la distancia entre el respectivo emisor de referencia (4) y el receptor (2), i es el índice sobre el emisorde referencia, φei es el valor de medición de fase en el receptor para el respectivo emisor de referencia en rad, λ esla longitud de onda del soporte en m y oi es el respectivo desplazamiento en m y puede determinarse el respectivodesplazamiento inicialmente mediante una posición de la construcción medida por un aparato de medición, laposición de los emisores de referencia fijos (4) y mediante una primera medición de fase y porque el dispositivo devaloración está configurado para adaptar los respectivos valores de desplazamiento para la compensación de saltosde fase de 2Π de los valores de medición de fase, pudiéndose valorar una modificación de la distancia repentina.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/007577.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: Eidloth,Andreas, FRANKE,NORBERT.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
PDF original: ES-2392140_T3.pdf
Fragmento de la descripción:
Sistema para la determinación del movimiento de una construcción oscilante
La invención se refiere a un sistema para la determinación del movimiento de una construcción oscilante.
Por el documento EP 1 556 713 B1 se conoce un sistema de localización, con el que es posible seguir en tiempo real la posición de al menos un objeto móvil continuamente. A este respecto se trata por ejemplo de objetos tales como pelotas o jugadores que se mueven en un campo de juego. En este sistema de localización están instalados de manera fija varios receptores y en los objetos están colocados emisores cuyas señales se reciben por los receptores y se valoran. Para facilitar una localización tridimensional de alta precisión, deben colocarse receptores también en alturas superiores, en el mejor de los casos incluso directamente sobre el campo de juego. Por tanto es imprescindible colocar los receptores en postes altos, siendo apropiados postes de iluminación con proyectores por ejemplo en caso de campos de fútbol.
Sin embargo se ha demostrado que tales postes empiezan a oscilar con la influencia del viento. Estos movimientos influyen en la distancia real y medida entre emisores, es decir entre el objeto que va a localizarse y el receptor. Si no se tiene en consideración el movimiento de los postes, entonces sus oscilaciones se transfieren al objeto que va a localizarse. A este respecto pueden producirse oscilaciones de la posición de varios centímetros en el caso más desfavorable con un objeto en reposo, por ejemplo una pelota en reposo.
Se sabe también que los movimientos de construcciones de torre altas o de rascacielos, debido a temporales o tifones se determinan mediante una detección y valoración por GPS.
El documento DE 10 055 289 A1 describe un sistema para la determinación de la posición de un objeto con un dispositivo de emisión de referencia y al menos dos dispositivos de emisión-recepción que están dispuestos en posición fija uno con respecto a otro y con respecto al dispositivo de emisión de referencia. La determinación de la distancia se basa en una medición del tiempo de recorrido, mencionándose una medición de fase que además puede consultarse.
En el documento US 6 366 854 1 se da a conocer un sistema GPS, con el que se realizan modificaciones de la distancia o de la posición por medio de mediciones de fase portadora. En el sistema GPS se recibe una señal continua por cada uno de los tres satélites, de modo que puede usarse un circuito sencillo de bucle de enganche de fase, para seguir las modificaciones condicionadas por la distancia o generar los valores de medición de fase.
Por consiguiente la invención se basa en el objetivo de crear un sistema para la determinación del movimiento de una construcción oscilante, en la que está colocada un receptor, con el que es posible determinar una modificación exacta de la posición de la construcción y con ello del receptor.
Este objetivo se soluciona según la invención mediante un sistema para la determinación del movimiento de una construcción oscilante según las características de la reivindicación independiente.
Mediante las medidas indicadas en las reivindicaciones dependientes son posibles perfeccionamientos y mejoras ventajosos.
Debido a que al menos están previstos tres emisores de referencia con posición conocida y fija respectivamente, cuyas señales de emisión están configuradas como señales moduladas en un soporte con frecuencia portadora definida, determinando un dispositivo de valoración valores de medición de fase a partir de las señales de recepción teniendo en consideración la frecuencia portadora definida, a partir de los cuales pueden calcularse la distancia respectivamente a los emisores y la modificación de la posición del receptor y con ello de la construcción oscilante, se consigue una detección de alta precisión de las oscilaciones de la construcción. Con el uso de sólo tres de tales emisores de referencia es necesario que todos los emisores estén sincronizados entre sí y adicionalmente con el receptor o estén acoplados con fase fija. Si se instalan cuatro emisores de este tipo que están sincronizados entre sí
o están acoplados con fase fija, no es necesaria una cadencia con el receptor en la construcción movida, dado que puede eliminarse la información obtenida por el cuarto emisor de referencia, el tiempo de recepción desconocido. Otra estructura del sistema, con el que puede determinarse toda la información tridimensional, consiste en que se prevén tres emisores de referencia no sincronizados o no acoplados con fase fija y al menos un receptor fijo adicional de posición conocida, estando sincronizado éste último con el receptor movido o estando acoplado con fase fija. Los emisores de referencia pueden presentar respectivamente distintas frecuencias portadoras, sin embargo es ventajoso que las señales de emisión estén moduladas a una frecuencia portadora común para todos los emisores de referencia, dado que entonces puede reducirse el esfuerzo de valoración de manera notable. Por ejemplo pueden usarse la banda ISM de 2, 4 GHz o la banda de 5 GHz u otras bandas que están a disposición conforme a las normas de frecuencia o las distribuciones de frecuencia. La información para la diferenciación de los emisores de referencia individuales puede modularse entonces como código de identificación en una secuencia de bit en el soporte.
Especialmente ventajoso prever el sistema según la invención en una disposición para la calibración de un sistema de radio para la determinación de la posición al menos de un objeto móvil en un espacio tridimensional con varios receptores o integrarlo como infraestructura, en el que al menos un receptor está fijado en una construcción oscilante y en el que está previsto un dispositivo de valoración que tiene en consideración la modificación de la posición del receptor fijado en la construcción en la determinación de la posición del objeto móvil. De esta manera puede calibrarse el sistema de radio y facilitarse una localización tridimensional de alta precisión, de manera ajustada por las influencias de la construcción oscilante. Los receptores están sincronizados preferentemente entre sí o están acoplados con fase fija, pudiendo no estar sincronizados entre sí entonces los emisores de referencia usados, de manera que pueden usarse pequeños emisores de referencia económicos.
Un ejemplo de realización de la invención está representado en el dibujo y se explica en más detalle en la siguiente descripción. Muestran:
la figura 1 una representación esquemática de un primer ejemplo de realización del sistema según la invención,
la figura 2 una representación esquemática de un segundo ejemplo de realización del sistema según la invención,
la figura 3 una representación esquemática de un tercer ejemplo de realización del sistema según la invención,
la figura 4 una representación esquemática del tercer ejemplo de realización des sistema según la invención, que está integrado en un sistema de localización,
la figura 5 una vista desde arriba en el sistema de coordenadas X-Y en la posición determinada de un poste de iluminación con proyectores, y
la figura 6 una representación de la posición X, de la posición Y y de la posición Z del poste de eliminación con proyectores con respecto al tiempo.
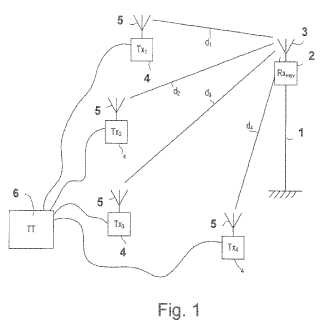
En la figura 1 está representado un sistema para la determinación del movimiento de una construcción oscilante por ejemplo de un poste, produciéndose la oscilación mediante la influencia del ambiente, concretamente mediante el viento o temporal. En la figura 1 está designado con 1 un poste, en el que está dispuesto de manera fija un receptor 2 con antena 3. En el entorno del poste 1 están dispuestos varios emisores de referencia 4 con antenas 5, en el ejemplo de realización cuatro emisores, que están fijos y se conoce su posición. Los emisores de referencia 4 emiten, por ejemplo en el procedimiento de acceso múltiple por división de código y/o tiempo, señales de emisión que están configuradas como señales moduladas a una frecuencia portadora, usándose como zona de transmisión preferentemente la banda ISM de 2, 4 GHz, sin embargo pudiéndose usar también otras bandas, tales como la banda ISM de 5 GHz u otras bandas que están a disposición conforme a las normas de frecuencia o las distribuciones de frecuencia. Las señales de emisión se emiten preferentemente... [Seguir leyendo]
Reivindicaciones:
1. Sistema para la determinación del movimiento de una construcción oscilante en la que está colocado de manera fija un receptor (2) , formado por al menos tres emisores de referencia (4) con posición conocida y fija respectivamente cuyas señales de emisión están configuradas como señales moduladas en un soporte con frecuencia portadora definida, un dispositivo de valoración que está configurado para determinar valores de medición de fase a partir de las señales de emisión recibidas por el receptor (2) de los emisores de referencia individuales (4) teniendo en consideración la frecuencia portadora definida, a partir de los cuales pueden calcularse la distancia respectivamente a los emisores de referencia (4) y la modificación de la posición del receptor (2) y con ello de la construcción oscilante, en el que se calcula la distancia entre el receptor (2) y el respectivo emisor de referencia (4) a partir de
en la que d es la distancia entre el respectivo emisor de referencia (4) y el receptor (2) , i es el índice sobre el emisor de referencia, «ei es el valor de medición de fase en el receptor para el respectivo emisor de referencia en rad, A es la longitud de onda del soporte en m y oi es el respectivo desplazamiento en m y puede determinarse el respectivo desplazamiento inicialmente mediante una posición de la construcción medida por un aparato de medición, la posición de los emisores de referencia fijos (4) y mediante una primera medición de fase y porque el dispositivo de valoración está configurado para adaptar los respectivos valores de desplazamiento para la compensación de saltos de fase de 2n de los valores de medición de fase, pudiéndose valorar una modificación de la distancia repentina.
2. Sistema según la reivindicación 1, caracterizado porque a todos los emisores de referencia (4) se le asigna una frecuencia portadora definida común.
3. Sistema según una de las reivindicaciones 1 a 2, caracterizado porque la disposición de al menos tres emisores de referencia fijos (4) con posición conocida y el un receptor (2) están sincronizados temporalmente entre sí o están conectados con fase fija a través de una fuente de sincronización (6) común.
4. Sistema según una de las reivindicaciones 1 a 2, caracterizado porque está previsto un cuarto emisor de referencia fijo (4) , en el que los cuatro emisores de referencia (4) están sincronizados temporalmente entre sí o están conectados con fase fija a través de una fuente de sincronización (6) común.
5. Sistema según una de las reivindicaciones 1 a 2, caracterizado porque además del receptor (2) está previsto en la construcción oscilante al menos un receptor fijo (7) de posición conocida, en el que los emisores de referencia (2) no están sincronizados entre sí o no están acoplados con fase fija y el receptor oscilante (2) y el receptor fijo (7) están sincronizados entre sí o están acoplados con fase fija y pueden calcularse los momentos de emisión de los respectivos emisores de referencia (2) de posición conocida a través de las respectivas señales de recepción del emisor fijo.
6. Sistema según una de las reivindicaciones 1 a 5, caracterizado porque el dispositivo de valoración está configurado para adaptar, con una modificación de la temperatura en el sistema, el respectivo valor del desplazamiento, pudiéndose detectar la modificación del valor de medición debido a la modificación de la temperatura mediante un procedimiento de filtros.
7. Sistema según una de las reivindicaciones 1 a 6, caracterizado porque el dispositivo de valoración está configurado para compensar una posible desviación de la posición de la construcción oscilante con respecto a la posición medida en el comienzo de la determinación mediante la modificación de los valores del respectivo desplazamiento a través de la valoración del valor medio de los valores de medición de la posición.
8. Disposición para la calibración de un sistema de radio para la determinación de la posición al menos de un emisor móvil (8) en un espacio tridimensional con varios receptores (2, 9) , de los que al menos uno (2) está fijado en una construcción oscilante mediante la influencia del ambiente, y con un sistema según una de las reivindicaciones 1 a 7, en el que está previsto un dispositivo de valoración que tiene en consideración la modificación de la posición del receptor (2) fijado en la construcción en la determinación de la posición del emisor móvil (8) .
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]
Formato de trama de difusión de tiempo de salida (TOD), del 4 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento de medición de alcance entre una o más estaciones inalámbricas, STA, y un primer punto de acceso, AP, el procedimiento que comprende: […]
SISTEMA DE AJUSTE FINO PARA LOCALIZACIÓN Y DEFINICIÓN DE OBJETOS MEDIANTE UNA DISPOSICIÓN DE ANTENAS RFID, del 12 de Febrero de 2020, de GUTIÉRREZ GONZÁLEZ, Noel: 1. Sistema de ajuste fino para la localización y definición de objetos mediante una disposición de antenas RFID, y donde dichos objetos pueden estar parados o […]
Sistema y método para proporcionar servicios basados en ubicación a bordo de una aeronave, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Sistema para proporcionar servicios basados en ubicación a bordo de una aeronave para usuarios que tienen dispositivos […]
 Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Medición de temporización fina segura, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un aparato para proporcionar un intercambio de medición de temporización fina, FTM, segura que comprende: medios para obtener un valor de token seguro inicial y […]