Sistema de señalamiento de objetivos.
Un sistema de señalamiento de objetivo (2) que se puede instalar a un vehículo terrestre (1),
dicho sistema comprende:
- medios de señalamiento ópticos (8) configurados con el fin de adquirir imágenes del exterior de dicho vehículo terrestre (1) y que tiene un eje de señalamiento óptico de objetivo móvil (C);
- medios móviles (11) capaces de mover dichos medios de señalamiento ópticos (8) con el fin de modificar la posición espacial de dicho eje de señalamiento óptico objetivo (C);
- medios de visualización (14), que son capaces de visualizar imágenes adquiridas por dichos medios de señalamiento ópticos (8) y un puntero (30) asociado con la posición tomada por dicho eje de señalamiento óptico 10 objetivo (C);
- Medios de comando de operación manual (15), que son capaces de generar un comando de desplazamiento (X(tn), Y(tn)), asociados con el desplazamiento que se va a dar a dicho eje de señalamiento óptico objetivo (C), en respuesta a una acción de desplazamiento manual ejercida por un usuario por medio de dichos medios de comando de operación manual (15) ;
- Un sistema de control automático (12) de la posición de dichos medios de señalamiento ópticos (8), que se configura con el fin de recibir como una entrada una cantidad de control relacionada con dicho comando de desplazamiento (X(tn), Y(tn)) y es capaz de determinar como una función de la cantidad de control la posición de dichos medios de señalamiento ópticos (8) que van a ser comandados para pasar a través de dichos medios móviles (11);
dicho sistema de señalamiento de objetivo (2) se caracteriza porque dicho sistema de control automático (12) comprende medios electrónicos de ayuda de señalización (22), que son capaces de recibir dicho comando de desplazamiento (X(tn), Y(tn)), y se configuran con el fin de realizar:
- Una primer filtración adaptación de dicho comando de desplazamiento (X(tn), Y(tn)) con el fin de asignar a dicha cantidad de control un valor proporcional a la velocidad de desplazamiento manual dada a los medios de comando de operación manual (15), cuando dicho sistema de señalamiento (2) está en una condición de colocación nuevamente en fase;
- Una segunda filtración adaptativa de dicho comando de desplazamiento (X(tn), Y(tn)) con el fin de asignar a dicha cantidad de control un valor proporcional a la aceleración del desplazamiento manual de usuario cuando dicho sistema de señalamiento de objetivo (2) está en una condición de seguimiento.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10165903.
Solicitante: SELEX Galileo S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via Albert Einstein, 35 Campi Bisenzio ITALIA.
Inventor/es: Riccobono,Aldo, Maffini,Massimo, Martelli,Stefano.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41G3/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q).
- F41G3/08 F41G […] › F41G 3/00 Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q). › con correctores de velocidad, dirección, temperatura, presión o humedad de la atmósfera (metrología G01).
PDF original: ES-2384436_T3.pdf
Fragmento de la descripción:
Sistema de señalamiento de objetivos.
La presente invención se relaciona con un sistema de señalamiento de objetivos.
En particular, la presente invención se relaciona con un sistema de señalamiento instalado a bordo de un vehículo terrestre, que corresponde, por ejemplo, a un tanque o vehículo similar, y se configura para ayudar convenientemente a un operador en la operación de apuntar a un objetivo, haciendo más fácil la operación rastreo cuando el vehículo y el objetivo ambos en movimiento.
Más en detalle, la presente invención se relaciona con un sistema de señalamiento del tipo que comprende un dispositivo de señalamiento óptico, que a su vez está equipado con una unidad de reflexión óptica que se monta en forma móvil sobre el vehículo terrestre de tal manera que se puede mover sobre dos ejes ortogonales (típicamente indicado como el "eje de azimut" y el "eje de elevación") , un sensor óptico (por ejemplo, una telecámara) montado sobre el vehículo con el fin de cooperar con la unidad óptica para adquirir las imágenes reflectadas por el último, un dispositivo móvil para la unidad óptica y un sistema de control óptico automático capaz de pilotar el dispositivo móvil con el fin de ajustar las posiciones de la unidad óptica sobre los ejes de elevación y/o azimut durante la adquisición de imágenes.
El sistema de señalamiento también comprende una pantalla capaz de mostrar el operador/artillero las imágenes adquiridas por el sensor óptico y un puntero gráfico, típicamente representado por puntos de mira superpuestos sobre las imágenes, lo que define una "referencia de señalización óptica" con respecto a la posición asumida por la unidad óptica en el eje de azimut y el eje de elevación, y una "referencia de disparo" que indica una cantidad correlacionada con la posición asumida del objetivo y por lo tanto utilizable por un sistema de armamento instalado posiblemente en el vehículo terrestre para determinar la línea de disparo con la cual opera el armamento con el fin de impactar el objetivo señalado.
El sistema de señalamiento también comprende una palanca de mando que se puede controlar manualmente por el operador en dos ejes de control mutuamente ortogonales, y se configura para proporcionar el sistema de control automático con cantidades de control correlacionadas con el desplazamiento de la palanca de mando en los dos ejes de control.
En particular, el sistema de control automático procesa las cantidades de control con el fin de controlar el desplazamiento de la unidad óptica sobre el eje de azimut y sobre el eje de elevación en respuesta al desplazamiento de la palanca de mando en el primer y segundo ejes de control respectivamente.
En sistemas de señalamiento conocidos del tipo descrito anteriormente, la unidad óptica comprende un espejo que tiene un eje de señalamiento óptico dispuesto en forma perpendicular a la superficie plana del espejo propiamente dicho y que se puede montar en forma móvil sobre el vehículo de tal manera que es posible mover el eje de señalamiento óptico sobre el eje de azimut, y/o sobre el eje de elevación. Con respecto a la unidad móvil, esta comprende motores eléctricos conectados a los miembros de transmisión de movimiento a través del espejo óptico para permitir el movimiento del espejo sobre el eje de azimut y el eje de elevación.
Con respecto al sistema de control automático, este comprende un módulo de ajuste, que se configura para estabilizar la orientación del eje óptico del espejo, haciéndolo independiente de los ángulos de orientación del vehículo medidos con respecto al eje de azimut y el eje de elevación asumidos por el vehículo propiamente dicho durante su movimiento.
En el caso que nos ocupa, el módulo de ajuste comprende un dispositivo giroscópico montado firmemente al tanque que recibe un ángulo de control de precesión en la entrada que indica la posición para hacer el eje de precesión del giroscopio y es capaz de proporcionar una señal de salida proporcional a la velocidad angular relativa entre el eje de precesión del giroscopio y el eje de señalamiento óptico del espejo. En otras palabras, el módulo de ajuste se configura para cancelar la velocidad angular relativa entre el eje de precesión del rotor de dispositivo giroscópico y el eje de señalamiento óptico del espejo por medio de un sistema de retroalimentación. El eje de señalamiento óptico del espejo por lo tanto tienen a asumir una posición angular que diferirá del eje de precesión por un ángulo constante con el tiempo, es decir tenderán a coincidir, excepto para un desfase.
El sistema de control automático también comprende un controlador electrónico, que se configura para recibir las cantidades de control generadas por la palanca de mando en la entrada, estas corresponden a las velocidades de desplazamiento angulares de la palanca de mando a lo largo de los dos ejes de control, y para llevar a cabo un cálculo de integración sobre ellos con el fin de generar un comando que contiene el ángulo que se debe hacer que asuma el eje de precesión del rotor de dispositivo giroscópico El sistema de señalamiento mencionado anteriormente es muy eficiente debido a la respuesta de los comandos emitida por el sistema de control automático a la unidad óptica con base en el comando de velocidad generado por la palanca de mando, aparte de ser extremadamente rápido, presenta alta selectividad a la acción manual ejercida por el operador sobre la palanca de mando.
Sin embargo, si de una parte la sensibilidad y la rapidez de respuesta del control es extremadamente útil para el operador en la fase inicial de aproximación y posicionamiento del puntero en el objetivo, una condición indicada en los sucesivo como la condición operativa de colocar nuevamente en fase, de otra parte se ha mostrado que no es completamente eficiente cuando el operador, después de posicionar el puntero en el objetivo, debe mantener el puntero asegurado sobre el objetivo en movimiento, esta última condición se indica como la condición operativa de seguimiento.
De hecho, en la condición operativa de seguimiento, la palanca de mando se somete a movimientos accidentales provocados por la agitación producida por el tanque mientras está en movimiento. En esta condición, el operador está obligado consecuentemente a compensar manualmente los movimientos inducidos en la palanca de mando con el fin de mantener el seguimiento del objetivo, esta última condición es extremadamente difícil cuando el objetivo a seguir tiene un movimiento angular constante.
Esta dificultad se manifiesta como un estado de tensión para el operador que, cuando pasa el tiempo, provoca un aumento involuntario en imprecisión en el señalamiento del objetivo.
El objeto de la presente invención es por lo tanto incorporar un sistema de señalamiento que es capaz de facilitar al operador mantener la puntería correcta sobre un objetivo móvil.
De acuerdo con la presente invención, se hace un sistema para facilitar la puntería a un objetivo, como se proporciona en la reivindicación 1 y preferiblemente, pero no necesariamente, en cualquiera de las reivindicaciones directa o indirectamente dependientes de la reivindicación 1.
De acuerdo con la presente invención, se hace un tanque, como se proporciona en la reivindicación 11.
La presente invención se describirá ahora con referencia a los dibujos adjuntos, que muestran un ejemplo no limitante de realización, en donde:
- La Figura 1 muestra esquemáticamente un vehículo terrestre equipado con un sistema de señalamiento de objetivo hecho de acuerdo con los principios de la presente invención,
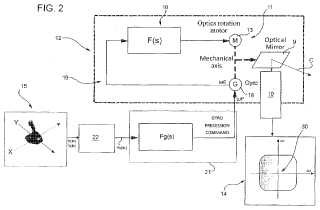
- La Figura 2 muestra un diagrama de bloque del sistema de señalamiento instalado en el vehículo terrestre mostrado en la Figura 1,
- La Figura 3 es el diagrama de bloque de un módulo de ayuda de señalamiento del sistema de señalamiento mostrado en la Figura 2,
- La Figura 4 es una gráfica de flujo de la operación del módulo de ayuda para señalamiento mostrado en la Figura 3, mientras que
- La Figura 5 muestra la gráfica de flujo del algoritmo de cálculo implementado por el módulo de ayuda para señalamiento mostrado en la Figura 3.
Con referencia a la Figura 1, el numeral de referencia 1 indica, en su totalidad, un vehículo terrestre que comprende un sistema de señalamiento 2 configurado para facilitar que un operador apunte a un objetivo cuando el vehículo 1 y/o el objetivo están en movimiento.
En el ejemplo mostrado... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de señalamiento de objetivo (2) que se puede instalar a un vehículo terrestre (1) , dicho sistema comprende:
- medios de señalamiento ópticos (8) configurados con el fin de adquirir imágenes del exterior de dicho vehículo terrestre (1) y que tiene un eje de señalamiento óptico de objetivo móvil (C) ;
- medios móviles (11) capaces de mover dichos medios de señalamiento ópticos (8) con el fin de modificar la posición espacial de dicho eje de señalamiento óptico objetivo (C) ;
- medios de visualización (14) , que son capaces de visualizar imágenes adquiridas por dichos medios de señalamiento ópticos (8) y un puntero (30) asociado con la posición tomada por dicho eje de señalamiento óptico objetivo (C) ;
- Medios de comando de operación manual (15) , que son capaces de generar un comando de desplazamiento (X (tn) , Y (tn) ) , asociados con el desplazamiento que se va a dar a dicho eje de señalamiento óptico objetivo (C) , en respuesta a una acción de desplazamiento manual ejercida por un usuario por medio de dichos medios de comando de operación manual (15) ;
- Un sistema de control automático (12) de la posición de dichos medios de señalamiento ópticos (8) , que se configura con el fin de recibir como una entrada una cantidad de control relacionada con dicho comando de desplazamiento (X (tn) , Y (tn) ) y es capaz de determinar como una función de la cantidad de control la posición de dichos medios de señalamiento ópticos (8) que van a ser comandados para pasar a través de dichos medios móviles (11) ;
dicho sistema de señalamiento de objetivo (2) se caracteriza porque dicho sistema de control automático (12) comprende medios electrónicos de ayuda de señalización (22) , que son capaces de recibir dicho comando de desplazamiento (X (tn) , Y (tn) ) , y se configuran con el fin de realizar:
- Una primer filtración adaptación de dicho comando de desplazamiento (X (tn) , Y (tn) ) con el fin de asignar a dicha cantidad de control un valor proporcional a la velocidad de desplazamiento manual dada a los medios de comando de operación manual (15) , cuando dicho sistema de señalamiento (2) está en una condición de colocación nuevamente en fase;
- Una segunda filtración adaptativa de dicho comando de desplazamiento (X (tn) , Y (tn) ) con el fin de asignar a dicha cantidad de control un valor proporcional a la aceleración del desplazamiento manual de usuario cuando dicho sistema de señalamiento de objetivo (2) está en una condición de seguimiento.
2. El sistema de señalamiento de acuerdo con la reivindicación 1, en donde dichos medios electrónicos de ayuda para señalamiento (22) se proporcionan con un filtro adaptativo (23) y se configuran con el fin de modificar la función de transferencia de dicho filtro adaptativo (22) como una función de la condición operativa de colocación nuevamente en fase/seguimiento de dicho sistema de señalamiento de objetivo (2) .
3. El sistema de señalamiento de acuerdo con la reivindicación 2, en donde dichos medios electrónicos de ayuda para señalamiento (22) se configuran con el fin de realizar dicho primer filtro adaptativo, cuando dicho sistema de señalización (2) está en la condición operativa de colocación nuevamente en fase, que conduce a dicho filtro adaptivo (23) para que tenga una primera función de transferencia de primer orden de un polo, o alternativamente dicho segundo filtro adaptivo cuando el sistema está en una condición operativa de seguimiento que conduce a dicho filtro adaptativo (23) a tener una segunda función de transferencia de segundo orden de dos polos.
4. El sistema de señalamiento de acuerdo con la reivindicación 3, en donde dichos medios electrónicos de ayuda para señalamiento (22) comprenden un módulo de ayuda para señalamiento (22) , que se configura con el fin de determinar una transición del sistema de señalamiento (2) desde la condición operativa de colocación nuevamente en fase a la condición operativa de seguimiento y vice versa; en el curso de cada transición del sistema de señalamiento (2) , dicho módulo de ayuda para señalamiento (22) modifica los coeficientes de dicho filtro adaptativo
(23) de tal manera que el mismo alcanza los valores suministrados por dicha primera o segunda función de transferencia, de acuerdo con una función temporal continua predeterminada.
5. El sistema de acuerdo con la reivindicación 4, en donde dicha cantidad de control corresponde a una velocidad de control; dicho comando de desplazamiento comprende posiciones manuales asociadas con el desplazamiento manual dado a través de dichos medios de comando manual (15) .
6. El sistema de acuerdo con la reivindicación 5, que comprende un módulo compensador (24) , que es capaz de recibir dicha velocidad de control de desplazamiento desde dicho módulo de ayuda para señalamiento (22) y proporciona como una salida a una velocidad de control saturada; dicho módulo de ayuda para señalamiento (22) es capaz de determinar dicha transición desde la condición operativa de colocación nuevamente en fase hasta la condición operativa de seguimiento y vice versa, como una función de dicha velocidad de control saturada.
7. El sistema de acuerdo con la reivindicación 6, en donde dicho módulo de ayuda para señalamiento (22) detecta una transición de dicho sistema de señalización (2) desde la condición operativa de colocación nuevamente en fase hasta la condición operativa de seguimiento cuando ocurre la siguiente condición: el sistema de señalamiento (2) corresponde a la condición operativa de colocación nuevamente en fase y la velocidad de control saturada, obtenida en el curso de la última filtración realizada por dicho filtro adaptivo (23) que resulta que es menor que un primer umbral de velocidad.
8. El sistema de acuerdo con la reivindicación 6, en donde dicho módulo de ayuda para señalamiento (22) detecta una transición desde la condición operativa de seguimiento hasta la condición operativa de colocación nuevamente en fase cuando ocurre la siguiente condición: la condición operativa realizada de dicho sistema de señalamiento (2) corresponde a la condición operativa de seguimiento y la velocidad de control saturada donde la última filtración realizada por dicho filtro adaptivo (23) es mayor que un segundo umbral de velocidad.
9. El sistema de acuerdo con las reivindicaciones 7 u 8, en donde cuando dicho módulo de ayuda para señalamiento
(22) detecta una transición del sistema de señalamiento (2) desde la condición operativa de seguimiento hasta la condición operativa de colocación nuevamente en fase, dado que dicho filtro adaptivo (23) se configure implementando las siguientes ecuaciones:
en donde X (tn) e Y (tn) corresponde a los comandos de desplazamiento asociados con las posiciones correspondientes dadas a dichos medios de comando de operación manual (15) a lo largo de un eje X y respectivamente un eje Y en un momento de muestra tn; Vx (tn) Vy (tn) corresponde a las velocidades angulares suministradas como una salida por dicho filtro adaptivo (23) en el momento de muestra tn; y αx es el coeficiente de la función de transferencia del filtro adaptivo (23) asociado con la cantidad X (tn) en la primera configuración; mientras que αy es un coeficiente de dicho filtro adaptivo de primer orden (23) asociado con la cantidad Y (tn) en la primera configuración.
10. El sistema de acuerdo con las reivindicaciones 7, 8 o 9, en donde cuando el módulo de ayuda para señalamiento (22) detecta una transición del sistema de señalamiento (2) desde la condición operativa de seguimiento hasta la condición operativa de colocación nuevamente en fase, el módulo de ayuda para señalamiento (22) dado que dicho filtro adaptivo (23) se configura implementando las siguientes ecuaciones:
en donde Ox (tn) y Oy (tn) corresponden a los desplazamientos dados a dichos medios de señalamiento ópticos (8) en el momento tn;
en donde αy, βx y αx, βy son los coeficientes de dicho filtro adaptivo (23) en dicha segunda función de transferencia; T es el intervalo de muestra del comando de desplazamiento; Vfx (tn) Vfy (tn) corresponden a velocidades angulares no saturadas filtradas por dicho filtro adaptivo (23) en el momento (tn) .
en donde OxPn+1/n OyPn+1/n corresponden a los desplazamientos transversal y en elevación de dichos medios de señalamiento ópticos (8) en el momento (tn+1) aunque evaluados en el tiempo anterior tn;
11. Un tanque (1) que comprende un sistema de señalamiento de objetivo (2) hecho de acuerdo con cualquiera de las reivindicaciones precedentes.
Patentes similares o relacionadas:
DISPOSITIVO PARA EL LANZAMIENTO DE BLANCOS AEREOS, del 9 de Octubre de 2014, de SISTEMAS DE CONTROL REMOTO, S.L: 1. Dispositivo para el lanzamiento de blancos aéreos de los realizados a partir de elastómeros y una rampa de lanzamiento regulable en inclinación caracterizado por estar […]
Procedimiento y dispositivo para la medición de la velocidad en la boca de un proyectil o similares, del 18 de Junio de 2014, de RHEINMETALL AIR DEFENCE AG: Procedimiento para la medición de la velocidad en la boca (v0) de un proyectil o similares con un cañón de arma o tubo de lanzamiento operado como una guía […]
Procedimiento para la regulación automática posterior de la posición de la representación de una cámara de imágenes térmicas, del 30 de Abril de 2014, de MBDA Deutschland GmbH: Procedimiento para la regulación posterior automática de la representación de una cámara de imágenes de vídeo dispuesta en un artefacto volador con la ayuda de un giroscopio […]
DISPOSITIVO DE CONTROL A DISTANCIA PARA VISORES DE ARMAS DE FUEGO, del 13 de Febrero de 2014, de TORRES GARCIA, Calixto Manuel: 1. Dispositivo de control a distancia para visores de armas de fuego cuya finalidad es que el usuario pueda ajustar las ruedas de control de distancia […]
ARMA DE COMBATE LIGERA Y PORTABLE, del 4 de Septiembre de 2013, de INSTALAZA, S.A.: 1. Arma de combate ligera y portable, en particular un arma de combate específicamente desarrollada para operaciones ofensivas/defensivas contra blancos […]
Dispositivo y procedimiento para la medición de la velocidad en la boca de un proyectil o similares, del 11 de Abril de 2013, de RHEINMETALL AIR DEFENCE AG: Dispositivo para la medición de la velocidad (V0) en la boca de un proyectil o similares, que comprende - un tubo liso de arma o de disparo como guiaondas , - […]
METODO PARA HACER QUE UN PROYECTIL ACTUE EN UN PUNTO DESEADO DENTRO DE UNA TRAYECTORIA EN UN PUNTO EN EL TIEMPO CALCULADO., del 1 de Abril de 2007, de TOTALFORSVARETS FORSKNINGSINSTITUT: Un método para calcular en tiempo casi real dos posibles ángulos de elevación de un proyectil y sus tiempos de vuelo asociados, de tal manera que […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma […]