MÉTODO PARA RECOGER OBJETOS DE UN LOTE EN UNA CINTA TRANSPORTADORA, EN UN SISTEMA DE MANIPULACIÓN DE MATERIALES, Y CINTA TRANSPORTADORA PARA LA REALIZACIÓN DEL MÉTODO.
Método para recoger objetos de un lote en una cinta (3) transportadora,
en un sistema de manipulación de materiales, en el que se define una trayectoria de objeto. Ventajosamente, el método comprende las siguientes etapas: - formar una fila de objetos (RO), que se extiende transversalmente con respecto a dicha trayectoria de objeto, y que tiene una longitud máxima que es sustancialmente igual al ancho de dicha cinta (3) transportadora, provocar la liberación de una fila de objetos (RO) entera a lo largo dicha cinta (3) transportadora, repitiéndose dichas etapas hasta que se agotan los objetos (4) de dicho lote, recogiendo dichos objetos según una formación en columnas de filas (RO) sobre dicha cinta (3) transportadora, proporcionando un mejor uso de su superficie.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2008/000809.
Solicitante: DEMATIC S.R.L.
Nacionalidad solicitante: Italia.
Dirección: Via Firenze 11 20063 Cernusco sul Naviglio (Milano) ITALIA.
Inventor/es: CAVALLO,ALESSANDRO, GALLIZIA DI VERGANO,Carlo, CARVELLI,Marco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/53 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › entre transportadores que se cruzan.
- B65G47/57 B65G 47/00 […] › para objetos.
- B65G47/64 B65G 47/00 […] › Cambio de vías de transportadores.
Fragmento de la descripción:
Método para recoger objetos de un lote en una cinta transportadora, en un sistema de manipulación de materiales, y cinta transportadora para la realización del método.
Campo técnico
La presente invención se refiere de manera general a un método para recoger objetos de un lote en una cinta transportadora, en un sistema de manipulación de materiales.
La invención también se refiere a una cinta transportadora para realizar dicho método, extendiéndose dicha cinta transportadora a lo largo de una dirección predeterminada y teniendo un ancho predeterminado, en la que se define una trayectoria de objeto sobre dicha cinta transportadora.
Técnica anterior
Tal como se conoce en el sector de la manipulación de materiales, y en particular, por ejemplo, en los sistemas de clasificación de objetos, para objetos tales como paquetes y similares, existe la necesidad de recoger todos los paquetes que pertenecen a un lote con un destino específico en una cinta transportadora específica, por ejemplo una caída.
Las cintas transportadoras conocidas, aunque responden a diversas necesidades y pueden ejecutar sustancialmente tal tarea, tienen no obstante un inconveniente conocido, que se ha aceptado a la fuerza, hasta ahora, que es evidente, cuando los objetos que van a recogerse tienen un tamaño reducido con respecto a un tamaño máximo típico. De hecho, cuando los objetos son de tamaño reducido, los objetos, que se liberan sobre la cinta transportadora, terminan de manera natural contra su pared lateral aguas abajo, permanecen en su proximidad y forman una fila o columna a lo largo de la misma, de modo que la superficie del plano deslizante de cinta transportadora permanece sustancialmente vacía y sin usar. Esto provoca un uso ineficaz de la superficie útil de la cinta transportadora, y proporciona inconvenientes relacionados, tales como la necesidad de proporcionar un vaciado más frecuente de la misma, o la necesidad de dotar al sistema de manipulación de materiales de una cinta transportadora más larga o más de una cinta transportadora, con respecto a objetos con un destino específico, hasta que se agota el lote.
El problema que va a solucionar la presente invención es proporcionar una cinta transportadora que tiene características estructurales y funcionales, tales como responder a la necesidad especificada anteriormente, al mismo tiempo que supera el inconveniente de cintas transportadoras conocidas.
Con el fin de solucionar el problema anterior, la presente invención proporciona un método para recoger objetos de un lote en una cinta transportadora, en un sistema de manipulación de materiales, sobre el que se define una trayectoria de objeto, caracterizado porque comprende las siguientes etapas:
- formar una fila de objetos, que se extiende transversalmente con respecto a dicha trayectoria de objeto, y que tiene una longitud máxima que es sustancialmente igual al ancho de dicha cinta transportadora,
- provocar la liberación de una fila de objetos entera a lo largo de dicha cinta transportadora,
repitiéndose dichas etapas hasta que se agotan los objetos de dicho lote, recogiendo dichos objetos según una formación en columnas de filas sobre dicha cinta transportadora, proporcionando un mejor uso de su superficie.
De manera adecuada, dicha etapa de formar la fila de objetos puede realizarse proporcionando una barrera que se extiende transversalmente con respecto a dicha trayectoria de objeto, sobre dicha cinta transportadora, así como medios de transferencia, que se colocan aguas arriba de dicha barrera y que actúan sobre dichos objetos con el fin de moverlos hacia un tope, hasta que se alcanza dicha longitud máxima.
De manera ventajosa, según la invención, la liberación de la fila entera puede realizarse retirando dicha barrera.
Además, el método puede comprender una etapa de detectar que se ha alcanzado la longitud máxima de la fila de objetos, por medio de un sensor, así como una etapa de emitir una señal correspondiente por parte de dicho sensor.
De manera adecuada, dicha etapa de provocar la liberación de la fila de objetos entera puede activarse por la señal emitida por dicho sensor.
La presente invención también proporciona una cinta transportadora para objetos de un lote en un sistema de manipulación de materiales, extendiéndose dicha cinta transportadora a lo largo de una dirección predeterminada y teniendo un ancho predeterminado, en la que se proporciona una trayectoria de objeto sobre la misma, caracterizada porque comprende, a lo largo de dicha trayectoria de objeto, un dispositivo de ordenamiento de objetos, que a su vez comprende una barrera transversal, que está colocada de manera desmontable a lo largo de dicha trayectoria de objeto, así como medios de transferencia, que están colocados aguas arriba de dicha barrera, y que actúan sobre los objetos con el fin de moverlos a lo largo de dicha barrera hacia un tope, formando, a partir de dicho tope, una fila de objetos, que tiene una longitud máxima que es sustancialmente igual al ancho de dicha cinta transportadora.
De manera ventajosa, dicho dispositivo de ordenamiento de objetos también puede comprender un sensor para emitir una señal, cuando se alcanza dicha longitud máxima de dicha fila de objetos y medios motores que actúan sobre la barrera, y activados por dicha señal.
De manera adecuada, dichos medios de transferencia pueden estar compuestos por un plano suave inclinado, que está inclinado hacia dicho tope.
De manera ventajosa, según la invención, dichos medios de transferencia también pueden estar compuestos por un conjunto de rodillos de rodillos de rueda libre o inactivos, que se extiende transversalmente con respecto a dicha cinta transportadora, aguas arriba de dicha barrera, y que está montado en una parte de la cinta transportadora, que está inclinada hacia el tope.
De manera adicionalmente ventajosa, dichos medios de transferencia también pueden estar compuestos por un conjunto de rodillos de rodillos motorizados, que se extiende transversalmente con respecto a dicha cinta transportadora, aguas arriba de dicha barrera, rotando dichos rodillos motorizados hacia el tope.
Además, de manera ventajosa, dichos medios de transferencia pueden estar compuestos por una plataforma que soporta dicha barrera y que puede moverse angularmente por medio de dichos medios motores, entre una posición en la que está inclinada hacia dicho tope, y una posición en la que es sustancialmente coplanar con respecto a un plano deslizante de la cinta transportadora.
De manera ventajosa, dicha barrera puede estar articulada con dicha plataforma, pudiendo moverse angularmente mediante dichos medios motores entre una posición coplanar con respecto a la plataforma a lo largo de su extensión, que es una posición de liberación de los objetos, y una posición que es sustancialmente perpendicular con respecto a dicha plataforma, para formar una barrera.
En particular, dichos medios motores pueden estar compuestos por un conjunto de cilindro-pistón accionado por fluido, que actúa entre una posición sobre un alojamiento de dicha cinta transportadora y un punto de extremo de un brazo de accionamiento, que se extiende, en una posición inferior, desde dicha plataforma, con el fin de aplicar un par motor alrededor de un eje de oscilación de dicha plataforma.
Además, dichos medios motores para mover angularmente dicha barrera pueden comprender un conjunto de cilindro-pistón accionado por fluido que actúa entre un pequeño soporte fijado, en una posición inferior, a dicha plataforma y un punto de extremo de un brazo de accionamiento que se extiende desde dicha barrera, con el fin de aplicar un par motor alrededor de un eje rotacional de dicha barrera.
En particular, dicha plataforma puede estar articulada con dicho alojamiento por medio de conjuntos de montura-pasador que definen un eje rotacional que se extiende sustancialmente a lo largo de una diagonal de dicha plataforma.
De manera adecuada, dicha diagonal se extiende entre un vértice aguas abajo del lado superior de dicha plataforma y un vértice aguas arriba del plano deslizante de dicha cinta transportadora.
En particular, dichos conjuntos de montura-pasador pueden estar colocados en dichos vértices a lo largo de dicha diagonal de dicha plataforma.
De manera ventajosa, según la invención, dicha cinta transportadora también...
Reivindicaciones:
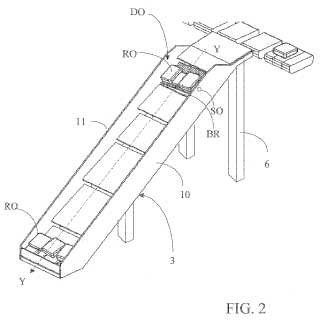
1. Método para recoger, en una cinta (3) transportadora, objetos (4) referentes a un lote específico, descargado de portadores (5) respectivos de una máquina (2) de clasificación que porta objetos a lo largo de una primera dirección y sentido (XX), en un sistema (1) de manipulación de materiales, definiéndose en dicha cinta (3) transportadora una trayectoria de objeto (PO) a lo largo de una segunda dirección y sentido (YY) transversal a la primera dirección y sentido (XX), caracterizado porque comprende las siguientes etapas:
- mover en la cinta (3) transportadora cada objeto desde una pared (10) lateral, que está en una posición aguas abajo con respecto a la primera dirección y sentido (XX) y una pared (11) lateral, que está en una posición aguas arriba con respecto a la primera dirección y sentido (XX) con el fin de formar una fila de objetos (RO), que se extiende transversalmente con respecto a dicha trayectoria de objeto (PO), y que tiene una longitud máxima que es sustancialmente igual al ancho (L) de dicha cinta (3) transportadora,
- provocar la liberación de una fila de objetos (RO) entera a lo largo dicha cinta (3) transportadora,
repitiéndose dichas etapas hasta que se agotan los objetos (4) de dicho lote específico, recogiendo dichos objetos (4) según una formación en columnas de filas (RO) sobre dicha cinta (3) transportadora, proporcionando un mejor uso de su superficie.
2. Método según la reivindicación 1, caracterizado porque dicha etapa de formar la fila de objetos (RO) se realiza proporcionando una barrera (BR) que se extiende transversalmente con respecto a dicha trayectoria de objeto sobre dicha cinta (2) transportadora, así como medios de transferencia (MT), que están colocados aguas arriba de dicha barrera (BR) y que actúan sobre dichos objetos (4) para moverlos hacia un tope (11), hasta que se alcanza dicha longitud máxima.
3. Método según la reivindicación 2, caracterizado porque la liberación de la fila (RO) entera se realiza retirando dicha barrera (BR).
4. Método según la reivindicación 1, caracterizado porque comprende una etapa de detectar que se ha alcanzado la longitud máxima de la fila de objetos (RO), por medio de un sensor (SO), así como una etapa de emitir una señal correspondiente por parte de dicho sensor (SO).
5. Método según la reivindicación 4, caracterizado porque dicha etapa de provocar la liberación de la fila de objetos (RO) entera se activa por la señal emitida por dicho sensor (SO).
6. Cinta (3) transportadora de objetos (4) en un sistema (1) de manipulación de materiales, objetos (4) referentes a un lote específico que se descarga de portadores (5) respectivos de una máquina (2) de clasificación que porta objetos a lo largo de una primera dirección y sentido (XX), extendiéndose dicha cinta (3) transportadora a lo largo de dicha primera dirección (XX) y teniendo un ancho predeterminado, definiéndose en dicha cinta (3) transportadora una trayectoria de objeto (PO) a lo largo de una segunda dirección y sentido (YY) transversal a la primera dirección y sentido (XX), caracterizada porque comprende, a lo largo de dicha trayectoria de objeto (PO), un dispositivo de ordenamiento de objetos (DO), que a su vez comprende una barrera transversal (BR), que está colocada de manera desmontable a lo largo de dicha trayectoria de objeto (PO), así como medios de transferencia (MT), que están colocados aguas arriba de dicha barrera (BR), y actúan sobre los objetos (4) con el fin de moverlos a lo largo de dicha barrera (BR) hacia un tope (11), formando, a partir de dicho tope (11), una fila de objetos (RO) que tiene una longitud máxima que es sustancialmente igual al ancho de dicha cinta (3) transportadora.
7. Cinta (3) transportadora según la reivindicación 6, caracterizada porque dicho dispositivo de ordenamiento de objetos (DO) también comprende un sensor (SO) para emitir una señal, cuando se alcanza dicha longitud máxima de dicha fila de objetos (RO), y medios motores (MM) que actúan sobre la barrera (BR), activados por dicha señal.
8. Cinta (3) transportadora según la reivindicación 6, caracterizada porque dichos medios de transferencia (MT) están compuestos por un plano (14) suave inclinado, que está inclinado hacia dicho tope (11).
9. Cinta (3) transportadora según la reivindicación 6, caracterizada porque dichos medios de transferencia (MT) están compuestos por un conjunto (14a) de rodillos de rodillos (15) inactivos, que se extiende transversalmente con respecto a dicha cinta (3) transportadora, aguas arriba de dicha barrera (BR), que está soportada sobre una parte (16) de la cinta (3) transportadora, que está inclinada hacia el tope (11).
10. Cinta (3) transportadora según la reivindicación 6, caracterizada porque dichos medios de transferencia (MT) están compuestos por un conjunto (17) de rodillos de rodillos (18) motorizados, que se extiende transversalmente con respecto a dicha cinta (3) transportadora, aguas arriba de dicha barrera (BR), rotando dichos rodillos (18) motorizados hacia el tope (11).
11. Cinta (3) transportadora según la reivindicación 6, caracterizada porque dichos medios de transferencia (MT) están compuestos por una plataforma (22) que soporta dicha barrera (BR) y que puede moverse angularmente, por medio de dichos medios (26) motores entre una posición en la que está inclinada hacia dicho tope (11) y una posición en la que es sustancialmente coplanar con respecto a un plano (7) deslizante de la cinta (3) transportadora.
12. Cinta (3) transportadora según la reivindicación 11, caracterizada porque dicha barrera (BR) está articulada con dicha plataforma (22), que puede moverse angularmente por medio de dichos medios (25) motores entre una posición coplanar con respecto a la plataforma (22) a lo largo de su extensión, que es una posición de liberación de los objetos (4), y una posición, que es sustancialmente perpendicular a dicha plataforma (22), para formar una barrera.
13. Cinta (3) transportadora según la reivindicación 11, caracterizada porque dichos medios (26) motores están compuestos por un conjunto de cilindro-pistón accionado por fluido, que actúa entre un punto sobre un alojamiento (6) de dicha cinta (3) transportadora y un punto de extremo de un brazo accionador que se extiende, en una posición inferior, desde dicha plataforma (22), con el fin de aplicar un par motor alrededor de un eje de oscilación (aa) de dicha plataforma (22).
14. Cinta (3) transportadora según la reivindicación 12, caracterizada porque dichos medios (25) motores para mover angularmente dicha barrera (BR) comprenden un conjunto de cilindro-pistón accionado por fluido, que actúa entre un pequeño soporte fijado, en una posición inferior, a dicha plataforma (22) y un punto de extremo de un brazo accionador que se extiende desde dicha barrera (BR), con el fin de aplicar un par motor alrededor de un eje rotacional de dicha barrera (BR).
15. Cinta (3) transportadora según la reivindicación 11, caracterizada porque dicha plataforma (22) está articulada con dicho alojamiento (6) por medio de conjuntos (28, 29) de montura-pasador que definen un eje rotacional (aa) que se extiende sustancialmente a lo largo de una diagonal (AC) de dicha plataforma (22).
16. Cinta (3) transportadora según la reivindicación 15, caracterizada porque dicha diagonal (AC) se extiende entre un vértice (C) aguas abajo del lado (8) superior de dicha plataforma (22) y un vértice (A) aguas arriba del plano (7) deslizante de dicha cinta (3) transportadora.
17. Cinta (3) transportadora según la reivindicación 16, caracterizada porque dichos conjuntos de montura-pasador están colocados en dichos vértices (A, C) a lo largo de dicha diagonal (AC) de dicha plataforma (22).
18. Cinta (3) transportadora según la reivindicación 6, caracterizada porque también comprende medios (21) para facilitar la liberación, para dicha fila (RO) de objetos (4) a lo largo de dicha cinta (3) transportadora.
19. Cinta (3) transportadora según la reivindicación 18, caracterizada porque dichos medios para facilitar la liberación comprenden una pluralidad de cintas (21) motorizadas, que pueden moverse entre una posición retraída y una posición que sobresale con respecto a dicha cinta (3) transportadora, aguas arriba de dicha barrera (BR).
20. Cinta (3) transportadora según la reivindicación 6, caracterizada porque también comprende elementos (20) rodantes inactivos, para reducir la fricción a lo largo de dicha barrera (BR).
21. Cinta (3) transportadora según la reivindicación 20, caracterizada porque dichos elementos rodantes inactivos comprenden una pluralidad de rodillos (20) inactivos.
22. Cinta (3) transportadora según la reivindicación 6, caracterizada porque comprende elementos (19) motorizados o rodantes inactivos, que están asociados con dicho plano (7) deslizante.
23. Dispositivo de ordenamiento de objetos (DO) para una cinta (3) transportadora, en el que se define una trayectoria de objeto, caracterizado porque comprende una barrera transversal (BR), que está colocada de manera desmontable a lo largo de dicha trayectoria de objeto, así como medios de transferencia (MT), que están previstos aguas arriba de dicha barrera (BR), y que actúan sobre dichos objetos (4), con el fin de moverlos a lo largo de dicha barrera (BR), hacia un tope (11), formando, a partir de dicho tope (11), una fila de objetos que tiene una longitud predeterminada.
Patentes similares o relacionadas:
Disco de soporte y sistema transportador, del 5 de Noviembre de 2019, de FLEXLINK COMPONENTS AB: Disco de soporte para un sistema transportador, que comprende un cuerpo inferior no circular que tiene una sección frontal que comprende una forma […]
Sistema para transportar y transferir productos alimenticios, del 21 de Agosto de 2019, de Marel Meat Processing Inc: Sistema para transportar productos alimenticios para envasado, que comprende: - una cinta transportadora que transporta productos alimenticios […]
Transportador que tiene rodillos accionados por inducción electromagnética, del 14 de Agosto de 2019, de LAITRAM L.L.C.: Un transportador que comprende: una cinta transportadora que tiene una pluralidad de rodillos eléctricamente conductores que tienen […]
Correa transportadora que incluye unos rodillos apilados bidireccionales, del 15 de Mayo de 2019, de LAITRAM L.L.C.: Un transportador que comprende: una correa transportadora que incluye: una pluralidad de primeros conjuntos de rodillos dispuestos en unas primeras […]
Conjunto de rodillos multidireccionales, del 25 de Marzo de 2019, de LAITRAM L.L.C.: Un sistema (400, 500, 500', 900, 1200, 1300, 1400) transportador que comprende: una formación de conjuntos de rodillos multidireccionales […]
Sistema clasificador por cintas cruzadas y método de clasificación de artículos, del 19 de Octubre de 2018, de DEMATIC CORP.: Un sistema clasificador por cintas cruzadas , que comprende: un conjunto de vía ; una pluralidad de transportadores unidos entre sí para desplazarse a lo […]
Correa transportadora que incluye unos rodillos apilados bidireccionales, del 18 de Octubre de 2018, de LAITRAM L.L.C.: Una correa transportadora que comprende: una pluralidad de primeros conjuntos de rodillos dispuestos en unas primeras calles que se extienden […]
Peine de transferencia y sistema de transferencia entre dos transportadores de cinta, del 5 de Octubre de 2018, de AFHER EUROBELT, S.A.: Peine de transferencia y sistema de transferencia entre dos transportadores de cinta. Un peine (100, 100') y un sistema de transferencia entre dos transportadores de […]